 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeta-Learning Augmented MPC for Disturbance-Aware Motion Planning and Control of Quadrotors
Oct 08, 2024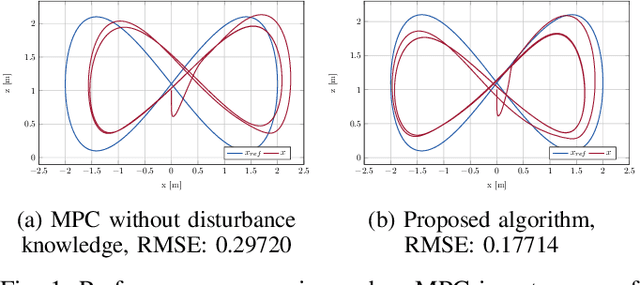
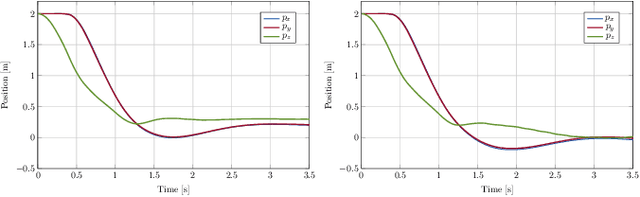
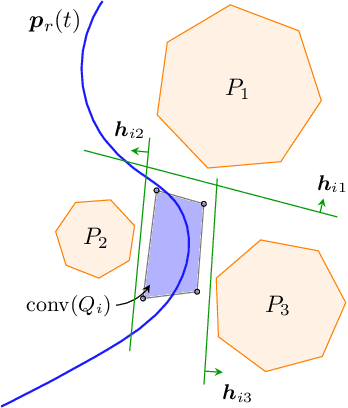
A major challenge in autonomous flights is unknown disturbances, which can jeopardize safety and lead to collisions, especially in obstacle-rich environments. This paper presents a disturbance-aware motion planning and control framework designed for autonomous aerial flights. The framework is composed of two key components: a disturbance-aware motion planner and a tracking controller. The disturbance-aware motion planner consists of a predictive control scheme and a learned model of disturbances that is adapted online. The tracking controller is designed using contraction control methods to provide safety bounds on the quadrotor behaviour in the vicinity of the obstacles with respect to the disturbance-aware motion plan. Finally, the algorithm is tested in simulation scenarios with a quadrotor facing strong crosswind and ground-induced disturbances.
Kinodynamic Motion Planning via Funnel Control for Underactuated Unmanned Surface Vehicles
Jul 31, 2023
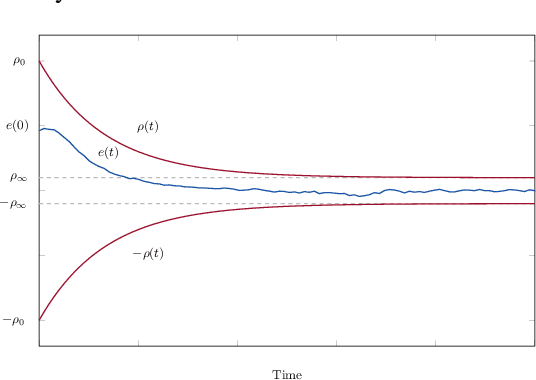
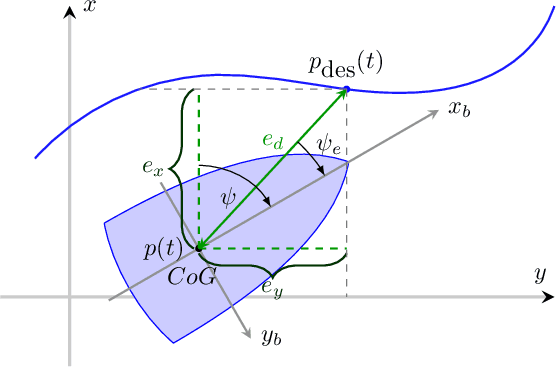
We develop an algorithm to control an underactuated unmanned surface vehicle (USV) using kinodynamic motion planning with funnel control (KDF). KDF has two key components: motion planning used to generate trajectories with respect to kinodynamic constraints, and funnel control, also referred to as prescribed performance control, which enables trajectory tracking in the presence of uncertain dynamics and disturbances. We extend prescribed performance control to address the challenges posed by underactuation and control-input saturation present on the USV. The proposed scheme guarantees stability under user-defined prescribed performance functions where model parameters and exogenous disturbances are unknown. Furthermore, we present an optimization problem to obtain smooth, collision-free trajectories while respecting kinodynamic constraints. We deploy the algorithm on a USV and verify its efficiency in real-world open-water experiments.
Prediction-Based Leader-Follower Rendezvous Model Predictive Control with Robustness to Communication Losses
Apr 03, 2023



In this paper we propose a novel distributed model predictive control (DMPC) based algorithm with a trajectory predictor for a scenario of landing of unmanned aerial vehicles (UAVs) on a moving unmanned surface vehicle (USV). The algorithm is executing DMPC with exchange of trajectories between the agents at a sufficient rate. In the case of loss of communication, and given the sensor setup, agents are predicting the trajectories of other agents based on the available measurements and prior information. The predictions are then used as the reference inputs to DMPC. During the landing, the followers are tasked with avoidance of USV-dependent obstacles and inter-agent collisions. In the proposed distributed algorithm, all agents solve their local optimization problem in parallel and we prove the convergence of the proposed algorithm. Finally, the simulation results support the theoretical findings.