 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Driven Probabilistic Fault Detection and Identification via Density Flow Matching
Mar 26, 2026Fault detection and identification (FDI) is critical for maintaining the safety and reliability of systems subject to actuator and sensor faults. In this paper, the problem of FDI for nonlinear control-affine systems under simultaneous actuator and sensor faults is studied. We model fault signatures through the evolution of the probability density flow along the trajectory and characterize detectability using the 2-Wasserstein metric. In order to introduce quantifiable guarantees for fault detectability based on system parameters and fault magnitudes, we derive upper bounds on the distributional separation between nominal and faulty dynamics. The latter is achieved through a stochastic contraction analysis of probability distributions in the 2-Wasserstein metric. A data-driven FDI method is developed by means of a conditional flow-matching scheme that learns neural vector fields governing density propagation under different fault profiles. To generalize the data-driven FDI method across continuous fault magnitudes, Gaussian bridge interpolation and Feature-wise Linear Modulation (FiLM) conditioning are incorporated. The effectiveness of our proposed method is illustrated on a spacecraft attitude control system, and its performance is compared with an augmented Extended Kalman Filter (EKF) baseline. The results confirm that trajectory-based distributional analysis provides improved discrimination between fault scenarios and enables reliable data-driven FDI with a lower false alarm rate compared with the augmented EKF.
ContractionPPO: Certified Reinforcement Learning via Differentiable Contraction Layers
Mar 20, 2026Legged locomotion in unstructured environments demands not only high-performance control policies but also formal guarantees to ensure robustness under perturbations. Control methods often require carefully designed reference trajectories, which are challenging to construct in high-dimensional, contact-rich systems such as quadruped robots. In contrast, Reinforcement Learning (RL) directly learns policies that implicitly generate motion, and uniquely benefits from access to privileged information, such as full state and dynamics during training, that is not available at deployment. We present ContractionPPO, a framework for certified robust planning and control of legged robots by augmenting Proximal Policy Optimization (PPO) RL with a state-dependent contraction metric layer. This approach enables the policy to maximize performance while simultaneously producing a contraction metric that certifies incremental exponential stability of the simulated closed-loop system. The metric is parameterized as a Lipschitz neural network and trained jointly with the policy, either in parallel or as an auxiliary head of the PPO backbone. While the contraction metric is not deployed during real-world execution, we derive upper bounds on the worst-case contraction rate and show that these bounds ensure the learned contraction metric generalizes from simulation to real-world deployment. Our hardware experiments on quadruped locomotion demonstrate that ContractionPPO enables robust, certifiably stable control even under strong external perturbations.
Environment-Aware Learning of Smooth GNSS Covariance Dynamics for Autonomous Racing
Feb 24, 2026Ensuring accurate and stable state estimation is a challenging task crucial to safety-critical domains such as high-speed autonomous racing, where measurement uncertainty must be both adaptive to the environment and temporally smooth for control. In this work, we develop a learning-based framework, LACE, capable of directly modeling the temporal dynamics of GNSS measurement covariance. We model the covariance evolution as an exponentially stable dynamical system where a deep neural network (DNN) learns to predict the system's process noise from environmental features through an attention mechanism. By using contraction-based stability and systematically imposing spectral constraints, we formally provide guarantees of exponential stability and smoothness for the resulting covariance dynamics. We validate our approach on an AV-24 autonomous racecar, demonstrating improved localization performance and smoother covariance estimates in challenging, GNSS-degraded environments. Our results highlight the promise of dynamically modeling the perceived uncertainty in state estimation problems that are tightly coupled with control sensitivity.
MonoTher-Depth: Enhancing Thermal Depth Estimation via Confidence-Aware Distillation
Apr 21, 2025Monocular depth estimation (MDE) from thermal images is a crucial technology for robotic systems operating in challenging conditions such as fog, smoke, and low light. The limited availability of labeled thermal data constrains the generalization capabilities of thermal MDE models compared to foundational RGB MDE models, which benefit from datasets of millions of images across diverse scenarios. To address this challenge, we introduce a novel pipeline that enhances thermal MDE through knowledge distillation from a versatile RGB MDE model. Our approach features a confidence-aware distillation method that utilizes the predicted confidence of the RGB MDE to selectively strengthen the thermal MDE model, capitalizing on the strengths of the RGB model while mitigating its weaknesses. Our method significantly improves the accuracy of the thermal MDE, independent of the availability of labeled depth supervision, and greatly expands its applicability to new scenarios. In our experiments on new scenarios without labeled depth, the proposed confidence-aware distillation method reduces the absolute relative error of thermal MDE by 22.88\% compared to the baseline without distillation.
* 8 Pages; The code will be available at https://github.com/ZuoJiaxing/monother_depth
Monte Carlo Tree Search with Spectral Expansion for Planning with Dynamical Systems
Dec 15, 2024The ability of a robot to plan complex behaviors with real-time computation, rather than adhering to predesigned or offline-learned routines, alleviates the need for specialized algorithms or training for each problem instance. Monte Carlo Tree Search is a powerful planning algorithm that strategically explores simulated future possibilities, but it requires a discrete problem representation that is irreconcilable with the continuous dynamics of the physical world. We present Spectral Expansion Tree Search (SETS), a real-time, tree-based planner that uses the spectrum of the locally linearized system to construct a low-complexity and approximately equivalent discrete representation of the continuous world. We prove SETS converges to a bound of the globally optimal solution for continuous, deterministic and differentiable Markov Decision Processes, a broad class of problems that includes underactuated nonlinear dynamics, non-convex reward functions, and unstructured environments. We experimentally validate SETS on drone, spacecraft, and ground vehicle robots and one numerical experiment, each of which is not directly solvable with existing methods. We successfully show SETS automatically discovers a diverse set of optimal behaviors and motion trajectories in real time.
* The first two authors contributed equally to this article
Motor Imagery Teleoperation of a Mobile Robot Using a Low-Cost Brain-Computer Interface for Multi-Day Validation
Dec 12, 2024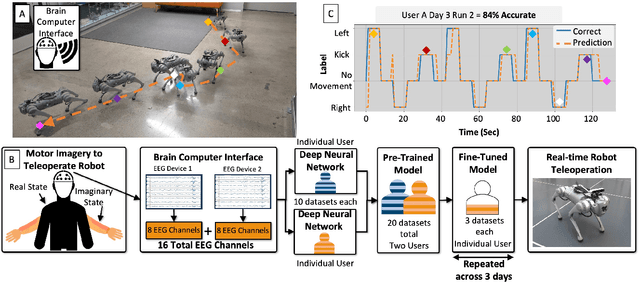
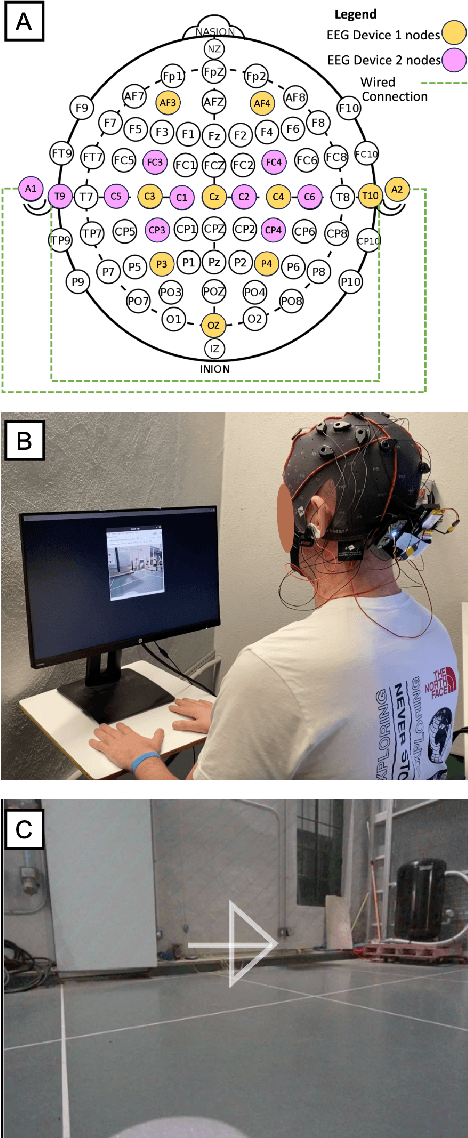
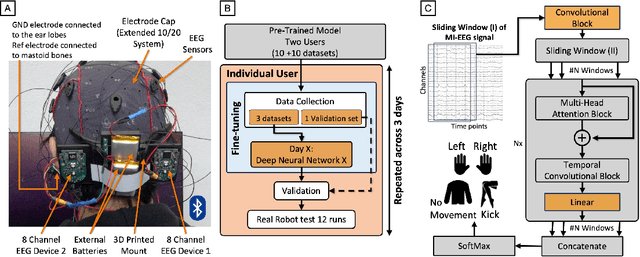
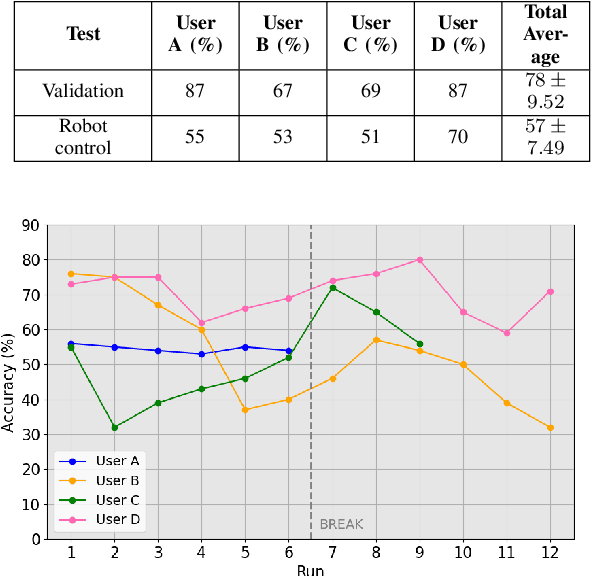
Brain-computer interfaces (BCI) have the potential to provide transformative control in prosthetics, assistive technologies (wheelchairs), robotics, and human-computer interfaces. While Motor Imagery (MI) offers an intuitive approach to BCI control, its practical implementation is often limited by the requirement for expensive devices, extensive training data, and complex algorithms, leading to user fatigue and reduced accessibility. In this paper, we demonstrate that effective MI-BCI control of a mobile robot in real-world settings can be achieved using a fine-tuned Deep Neural Network (DNN) with a sliding window, eliminating the need for complex feature extractions for real-time robot control. The fine-tuning process optimizes the convolutional and attention layers of the DNN to adapt to each user's daily MI data streams, reducing training data by 70% and minimizing user fatigue from extended data collection. Using a low-cost (~$3k), 16-channel, non-invasive, open-source electroencephalogram (EEG) device, four users teleoperated a quadruped robot over three days. The system achieved 78% accuracy on a single-day validation dataset and maintained a 75% validation accuracy over three days without extensive retraining from day-to-day. For real-world robot command classification, we achieved an average of 62% accuracy. By providing empirical evidence that MI-BCI systems can maintain performance over multiple days with reduced training data to DNN and a low-cost EEG device, our work enhances the practicality and accessibility of BCI technology. This advancement makes BCI applications more feasible for real-world scenarios, particularly in controlling robotic systems.
Model Predictive Trees: Sample-Efficient Receding Horizon Planning with Reusable Tree Search
Nov 23, 2024


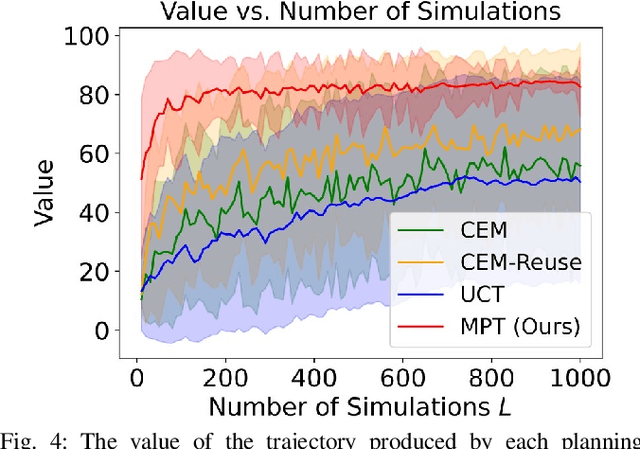
We present Model Predictive Trees (MPT), a receding horizon tree search algorithm that improves its performance by reusing information efficiently. Whereas existing solvers reuse only the highest-quality trajectory from the previous iteration as a "hotstart", our method reuses the entire optimal subtree, enabling the search to be simultaneously guided away from the low-quality areas and towards the high-quality areas. We characterize the restrictions on tree reuse by analyzing the induced tracking error under time-varying dynamics, revealing a tradeoff between the search depth and the timescale of the changing dynamics. In numerical studies, our algorithm outperforms state-of-the-art sampling-based cross-entropy methods with hotstarting. We demonstrate our planner on an autonomous vehicle testbed performing a nonprehensile manipulation task: pushing a target object through an obstacle field. Code associated with this work will be made available at https://github.com/jplathrop/mpt.
Meta-Learning Augmented MPC for Disturbance-Aware Motion Planning and Control of Quadrotors
Oct 08, 2024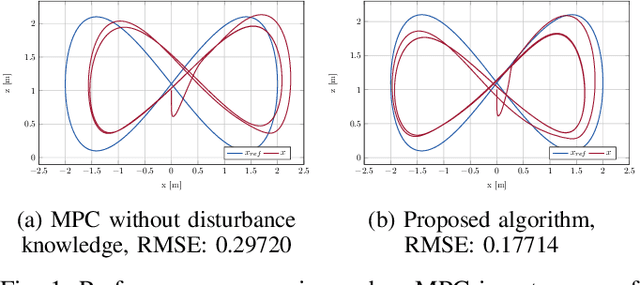
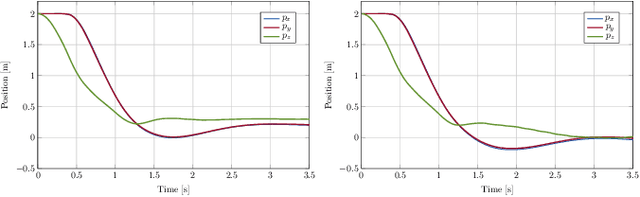
A major challenge in autonomous flights is unknown disturbances, which can jeopardize safety and lead to collisions, especially in obstacle-rich environments. This paper presents a disturbance-aware motion planning and control framework designed for autonomous aerial flights. The framework is composed of two key components: a disturbance-aware motion planner and a tracking controller. The disturbance-aware motion planner consists of a predictive control scheme and a learned model of disturbances that is adapted online. The tracking controller is designed using contraction control methods to provide safety bounds on the quadrotor behaviour in the vicinity of the obstacles with respect to the disturbance-aware motion plan. Finally, the algorithm is tested in simulation scenarios with a quadrotor facing strong crosswind and ground-induced disturbances.
Vision-Based Detection of Uncooperative Targets and Components on Small Satellites
Aug 22, 2024Space debris and inactive satellites pose a threat to the safety and integrity of operational spacecraft and motivate the need for space situational awareness techniques. These uncooperative targets create a challenging tracking and detection problem due to a lack of prior knowledge of their features, trajectories, or even existence. Recent advancements in computer vision models can be used to improve upon existing methods for tracking such uncooperative targets to make them more robust and reliable to the wide-ranging nature of the target. This paper introduces an autonomous detection model designed to identify and monitor these objects using learning and computer vision. The autonomous detection method aims to identify and accurately track the uncooperative targets in varied circumstances, including different camera spectral sensitivities, lighting, and backgrounds. Our method adapts to the relative distance between the observing spacecraft and the target, and different detection strategies are adjusted based on distance. At larger distances, we utilize You Only Look Once (YOLOv8), a multitask Convolutional Neural Network (CNN), for zero-shot and domain-specific single-shot real time detection of the target. At shorter distances, we use knowledge distillation to combine visual foundation models with a lightweight fast segmentation CNN (Fast-SCNN) to segment the spacecraft components with low storage requirements and fast inference times, and to enable weight updates from earth and possible onboard training. Lastly, we test our method on a custom dataset simulating the unique conditions encountered in space, as well as a publicly-available dataset.
MAGIC-VFM: Meta-learning Adaptation for Ground Interaction Control with Visual Foundation Models
Jul 17, 2024Control of off-road vehicles is challenging due to the complex dynamic interactions with the terrain. Accurate modeling of these interactions is important to optimize driving performance, but the relevant physical phenomena are too complex to model from first principles. Therefore, we present an offline meta-learning algorithm to construct a rapidly-tunable model of residual dynamics and disturbances. Our model processes terrain images into features using a visual foundation model (VFM), then maps these features and the vehicle state to an estimate of the current actuation matrix using a deep neural network (DNN). We then combine this model with composite adaptive control to modify the last layer of the DNN in real time, accounting for the remaining terrain interactions not captured during offline training. We provide mathematical guarantees of stability and robustness for our controller and demonstrate the effectiveness of our method through simulations and hardware experiments with a tracked vehicle and a car-like robot. We evaluate our method outdoors on different slopes with varying slippage and actuator degradation disturbances, and compare against an adaptive controller that does not use the VFM terrain features. We show significant improvement over the baseline in both hardware experimentation and simulation.