 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-Based Detection of Uncooperative Targets and Components on Small Satellites
Aug 22, 2024Space debris and inactive satellites pose a threat to the safety and integrity of operational spacecraft and motivate the need for space situational awareness techniques. These uncooperative targets create a challenging tracking and detection problem due to a lack of prior knowledge of their features, trajectories, or even existence. Recent advancements in computer vision models can be used to improve upon existing methods for tracking such uncooperative targets to make them more robust and reliable to the wide-ranging nature of the target. This paper introduces an autonomous detection model designed to identify and monitor these objects using learning and computer vision. The autonomous detection method aims to identify and accurately track the uncooperative targets in varied circumstances, including different camera spectral sensitivities, lighting, and backgrounds. Our method adapts to the relative distance between the observing spacecraft and the target, and different detection strategies are adjusted based on distance. At larger distances, we utilize You Only Look Once (YOLOv8), a multitask Convolutional Neural Network (CNN), for zero-shot and domain-specific single-shot real time detection of the target. At shorter distances, we use knowledge distillation to combine visual foundation models with a lightweight fast segmentation CNN (Fast-SCNN) to segment the spacecraft components with low storage requirements and fast inference times, and to enable weight updates from earth and possible onboard training. Lastly, we test our method on a custom dataset simulating the unique conditions encountered in space, as well as a publicly-available dataset.
Adaptive Nonlinear Control of Fixed-Wing VTOL with Airflow Vector Sensing
Mar 17, 2020
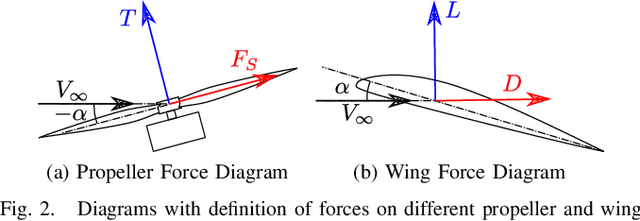
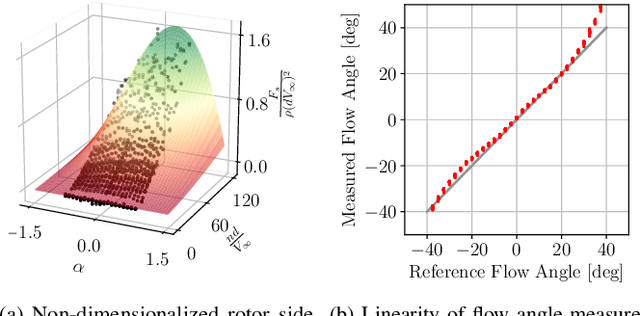
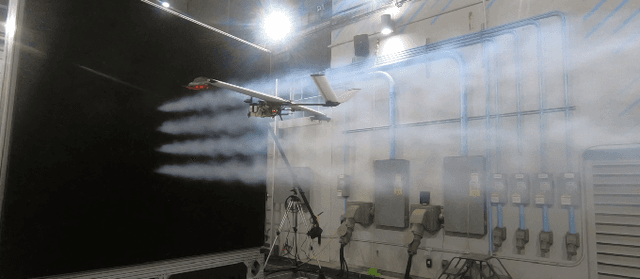
Fixed-wing vertical take-off and landing (VTOL) aircraft pose a unique control challenge that stems from complex aerodynamic interactions between wings and rotors. Thus, accurate estimation of external forces is indispensable for achieving high performance flight. In this paper, we present a composite adaptive nonlinear tracking controller for a fixed-wing VTOL. The method employs online adaptation of linear force models, and generates accurate estimation for wing and rotor forces in real-time based on information from a three-dimensional airflow sensor. The controller is implemented on a custom-built fixed-wing VTOL, which shows improved velocity tracking and force prediction during the transition stage from hover to forward flight, compared to baseline flight controllers.