 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Nonlinear Control of Fixed-Wing VTOL with Airflow Vector Sensing
Paper and Code
Mar 17, 2020
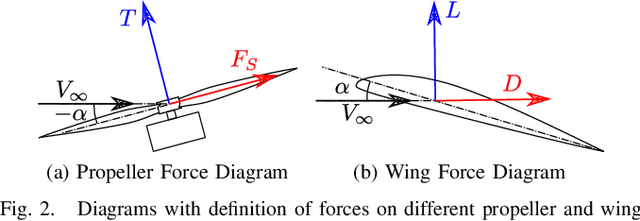
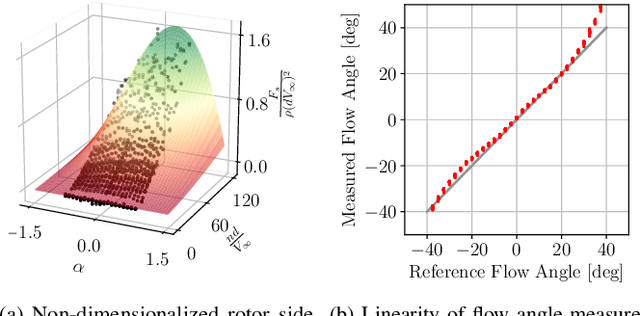
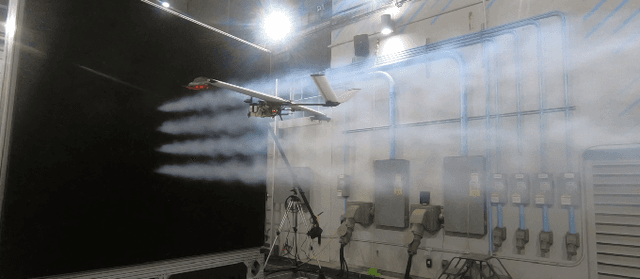
Fixed-wing vertical take-off and landing (VTOL) aircraft pose a unique control challenge that stems from complex aerodynamic interactions between wings and rotors. Thus, accurate estimation of external forces is indispensable for achieving high performance flight. In this paper, we present a composite adaptive nonlinear tracking controller for a fixed-wing VTOL. The method employs online adaptation of linear force models, and generates accurate estimation for wing and rotor forces in real-time based on information from a three-dimensional airflow sensor. The controller is implemented on a custom-built fixed-wing VTOL, which shows improved velocity tracking and force prediction during the transition stage from hover to forward flight, compared to baseline flight controllers.