 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Nonlinear Control of Fixed-Wing VTOL with Airflow Vector Sensing
Mar 17, 2020
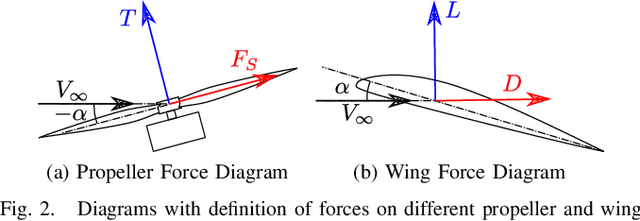
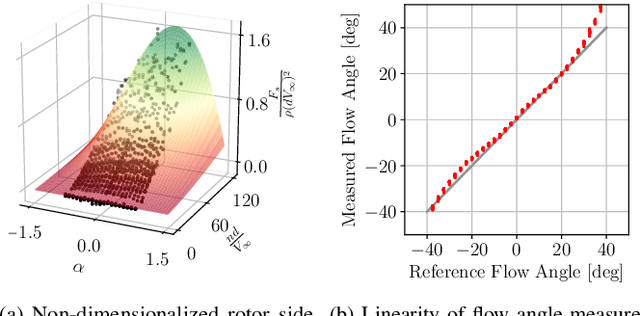
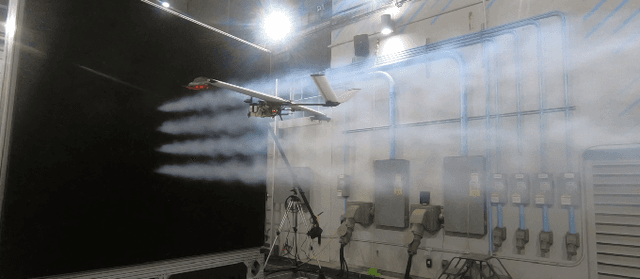
Fixed-wing vertical take-off and landing (VTOL) aircraft pose a unique control challenge that stems from complex aerodynamic interactions between wings and rotors. Thus, accurate estimation of external forces is indispensable for achieving high performance flight. In this paper, we present a composite adaptive nonlinear tracking controller for a fixed-wing VTOL. The method employs online adaptation of linear force models, and generates accurate estimation for wing and rotor forces in real-time based on information from a three-dimensional airflow sensor. The controller is implemented on a custom-built fixed-wing VTOL, which shows improved velocity tracking and force prediction during the transition stage from hover to forward flight, compared to baseline flight controllers.
Trajectory Tracking Control of a Flexible Spine Robot, With and Without a Reference Input
Aug 24, 2018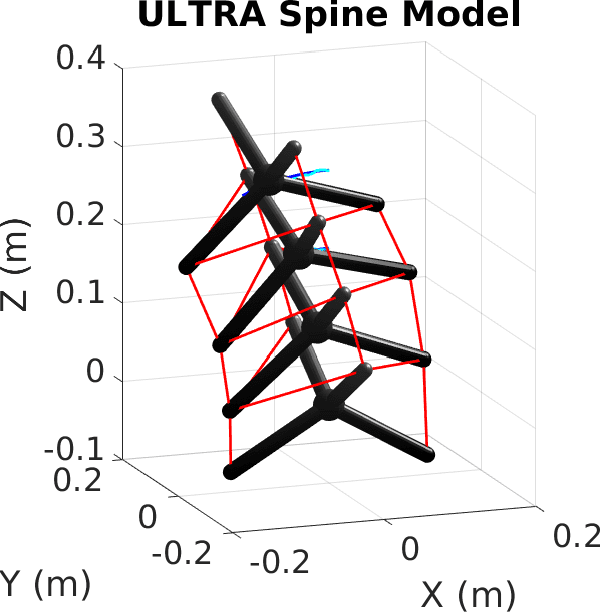
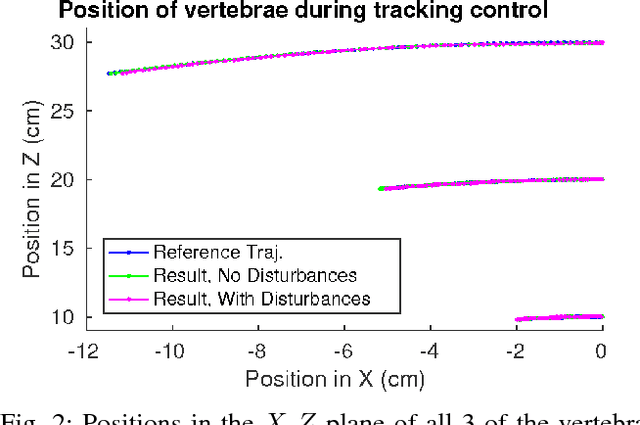
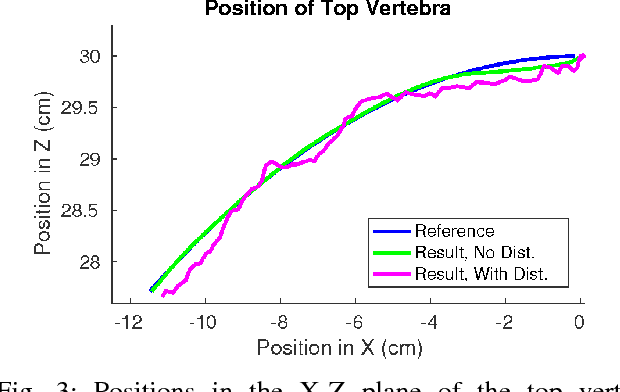
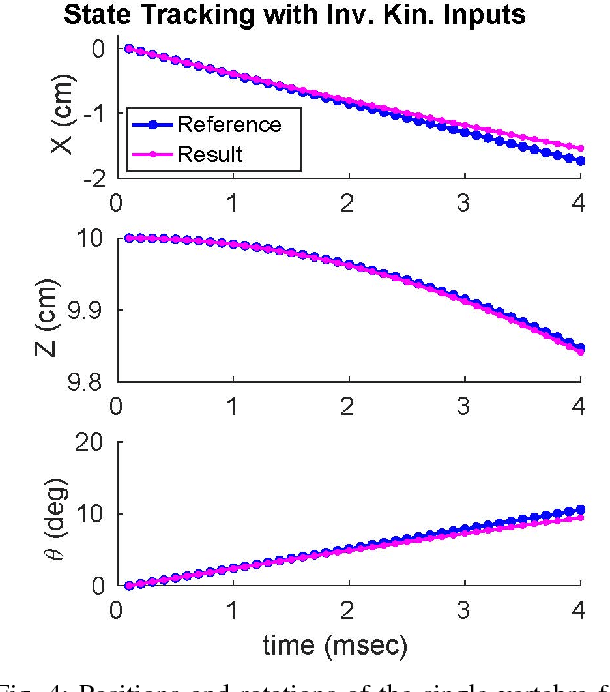
The Underactuated Lightweight Tensegrity Robotic Assistive Spine (ULTRA Spine) project is an ongoing effort to develop a flexible, actuated backbone for quadruped robots. In this work, model-predictive control is used to track a trajectory in the robot's state space, in simulation. The state trajectory used here corresponds to a bending motion of the spine, with translations and rotations of the moving vertebrae. Two different controllers are presented in this work: one that does not use a reference input but includes smoothing constrants, and a second one that uses a reference input without smoothing. For the smoothing controller, without reference inputs, the error converges to zero, while the simpler-to-tune controller with an input reference shows small errors but not complete convergence. It is expected that this controller will converge as it is improved further.
Inclined Surface Locomotion Strategies for Spherical Tensegrity Robots
Aug 27, 2017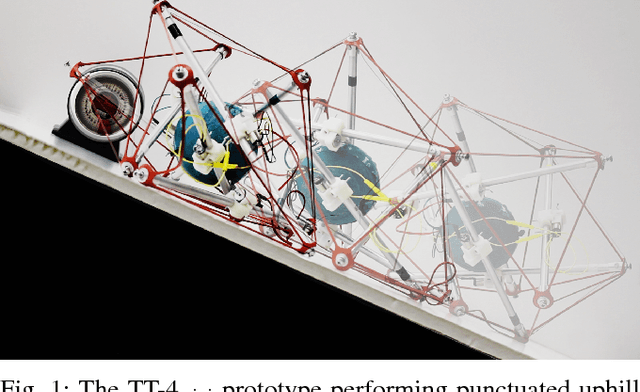
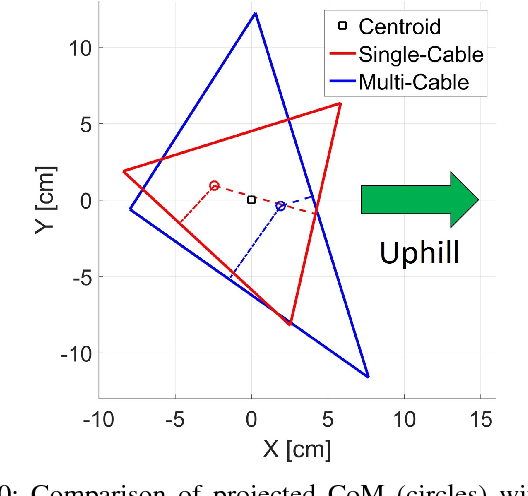
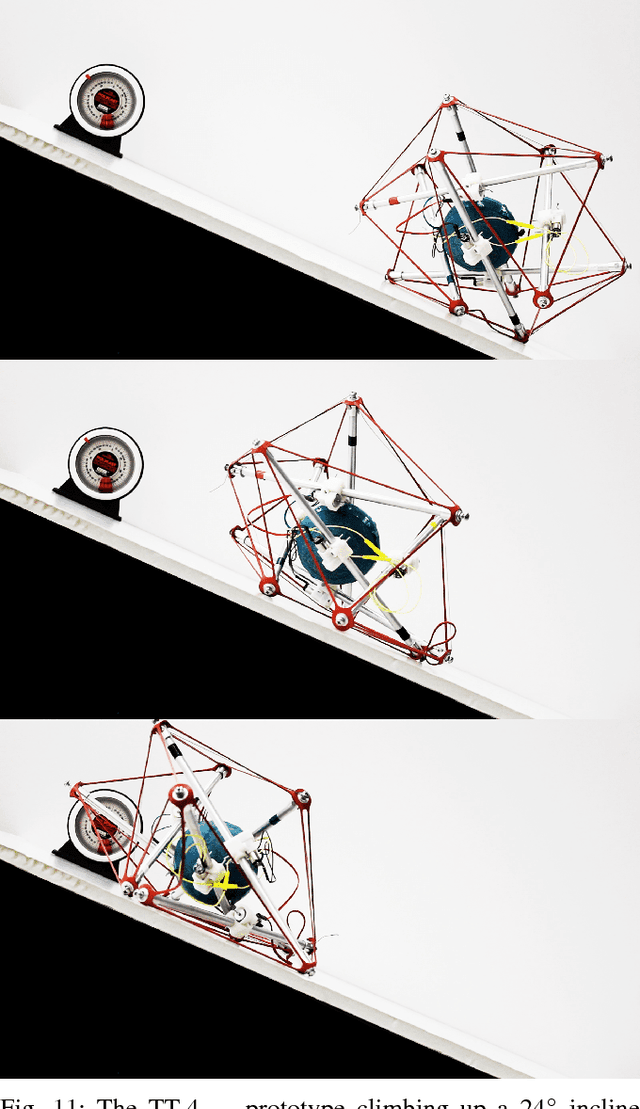
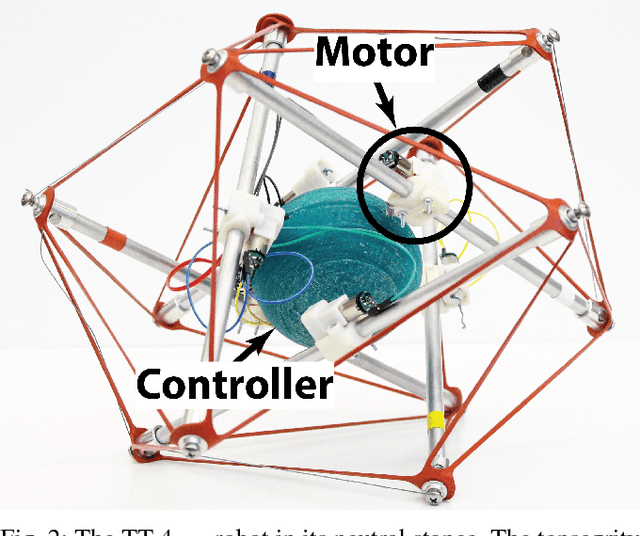
This paper presents a new teleoperated spherical tensegrity robot capable of performing locomotion on steep inclined surfaces. With a novel control scheme centered around the simultaneous actuation of multiple cables, the robot demonstrates robust climbing on inclined surfaces in hardware experiments and speeds significantly faster than previous spherical tensegrity models. This robot is an improvement over other iterations in the TT-series and the first tensegrity to achieve reliable locomotion on inclined surfaces of up to 24\degree. We analyze locomotion in simulation and hardware under single and multi-cable actuation, and introduce two novel multi-cable actuation policies, suited for steep incline climbing and speed, respectively. We propose compelling justifications for the increased dynamic ability of the robot and motivate development of optimization algorithms able to take advantage of the robot's increased control authority.