 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory Tracking Control of a Flexible Spine Robot, With and Without a Reference Input
Aug 24, 2018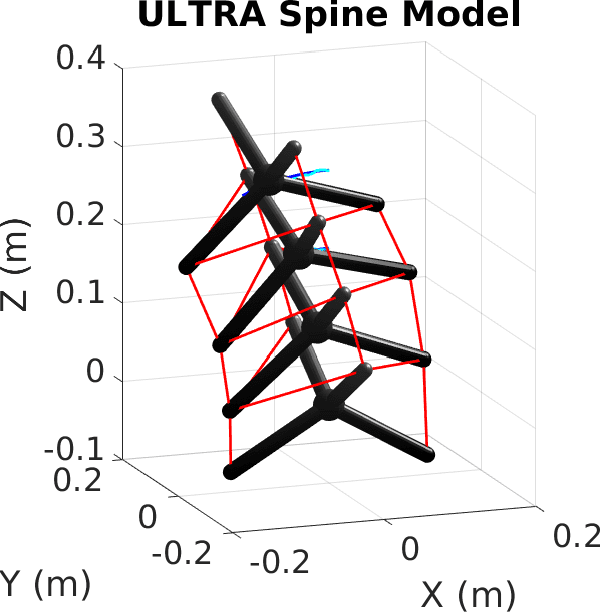
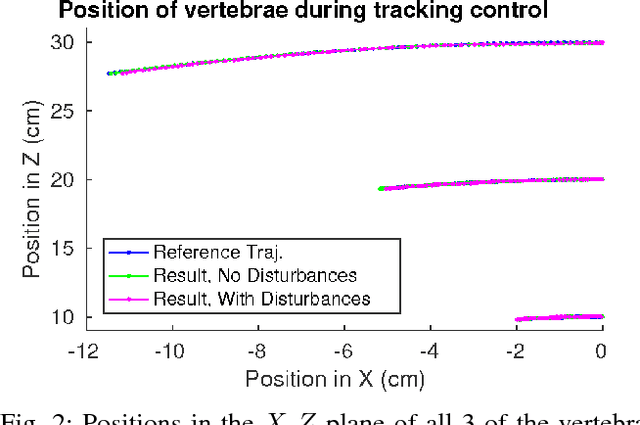
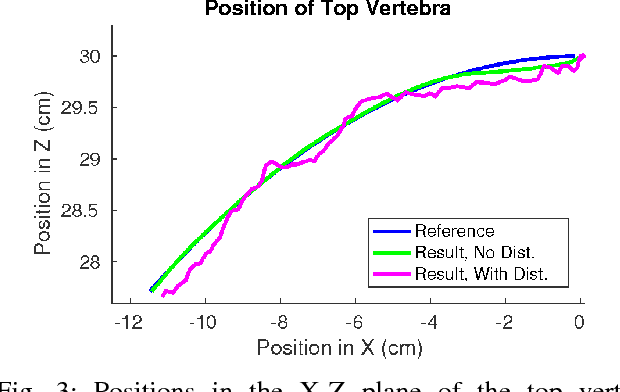
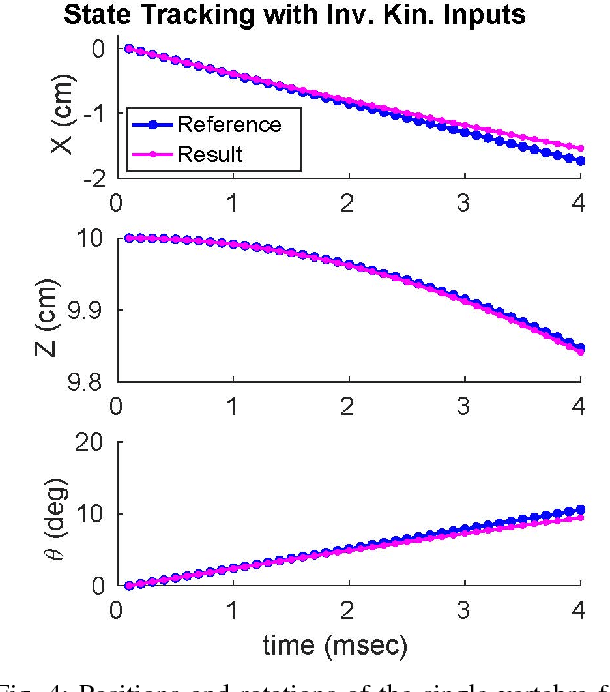
The Underactuated Lightweight Tensegrity Robotic Assistive Spine (ULTRA Spine) project is an ongoing effort to develop a flexible, actuated backbone for quadruped robots. In this work, model-predictive control is used to track a trajectory in the robot's state space, in simulation. The state trajectory used here corresponds to a bending motion of the spine, with translations and rotations of the moving vertebrae. Two different controllers are presented in this work: one that does not use a reference input but includes smoothing constrants, and a second one that uses a reference input without smoothing. For the smoothing controller, without reference inputs, the error converges to zero, while the simpler-to-tune controller with an input reference shows small errors but not complete convergence. It is expected that this controller will converge as it is improved further.