 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForce-Safe Environment Maps and Real-Time Detection for Soft Robot Manipulators
Nov 07, 2025Soft robot manipulators have the potential for deployment in delicate environments to perform complex manipulation tasks. However, existing obstacle detection and avoidance methods do not consider limits on the forces that manipulators may exert upon contact with delicate obstacles. This work introduces a framework that maps force safety criteria from task space (i.e. positions along the robot's body) to configuration space (i.e. the robot's joint angles) and enables real-time force safety detection. We incorporate limits on allowable environmental contact forces for given task-space obstacles, and map them into configuration space (C-space) through the manipulator's forward kinematics. This formulation ensures that configurations classified as safe are provably below the maximum force thresholds, thereby allowing us to determine force-safe configurations of the soft robot manipulator in real-time. We validate our approach in simulation and hardware experiments on a two-segment pneumatic soft robot manipulator. Results demonstrate that the proposed method accurately detects force safety during interactions with deformable obstacles, thereby laying the foundation for real-time safe planning of soft manipulators in delicate, cluttered environments.
Soft Robotic Delivery of Coiled Anchors for Cardiac Interventions
Jun 24, 2025Trans-catheter cardiac intervention has become an increasingly available option for high-risk patients without the complications of open heart surgery. However, current catheterbased platforms suffer from a lack of dexterity, force application, and compliance required to perform complex intracardiac procedures. An exemplary task that would significantly ease minimally invasive intracardiac procedures is the implantation of anchor coils, which can be used to fix and implant various devices in the beating heart. We introduce a robotic platform capable of delivering anchor coils. We develop a kineto-statics model of the robotic platform and demonstrate low positional error. We leverage the passive compliance and high force output of the actuator in a multi-anchor delivery procedure against a motile in-vitro simulator with millimeter level accuracy.
Safe Autonomous Environmental Contact for Soft Robots using Control Barrier Functions
Apr 20, 2025Robots built from soft materials will inherently apply lower environmental forces than their rigid counterparts, and therefore may be more suitable in sensitive settings with unintended contact. However, these robots' applied forces result from both their design and their control system in closed-loop, and therefore, ensuring bounds on these forces requires controller synthesis for safety as well. This article introduces the first feedback controller for a soft manipulator that formally meets a safety specification with respect to environmental contact. In our proof-of-concept setting, the robot's environment has known geometry and is deformable with a known elastic modulus. Our approach maps a bound on applied forces to a safe set of positions of the robot's tip via predicted deformations of the environment. Then, a quadratic program with Control Barrier Functions in its constraints is used to supervise a nominal feedback signal, verifiably maintaining the robot's tip within this safe set. Hardware experiments on a multi-segment soft pneumatic robot demonstrate that the proposed framework successfully constrains its environmental contact forces. This framework represents a fundamental shift in perspective on control and safety for soft robots, defining and implementing a formally verifiable logic specification on their pose and contact forces.
Real-Time Trajectory Generation for Soft Robot Manipulators Using Differential Flatness
Dec 11, 2024



Soft robots have the potential to interact with sensitive environments and perform complex tasks effectively. However, motion plans and trajectories for soft manipulators are challenging to calculate due to their deformable nature and nonlinear dynamics. This article introduces a fast real-time trajectory generation approach for soft robot manipulators, which creates dynamically-feasible motions for arbitrary kinematically-feasible paths of the robot's end effector. Our insight is that piecewise constant curvature (PCC) dynamics models of soft robots can be differentially flat, therefore control inputs can be calculated algebraically rather than through a nonlinear differential equation. We prove this flatness under certain conditions, with the curvatures of the robot as the flat outputs. Our two-step trajectory generation approach uses an inverse kinematics procedure to calculate a motion plan of robot curvatures per end-effector position, then, our flatness diffeomorphism generates corresponding control inputs that respect velocity. We validate our approach through simulations of our representative soft robot manipulator along three different trajectories, demonstrating a margin of 23x faster than real-time at a frequency of 100 Hz. This approach could allow fast verifiable replanning of soft robots' motions in safety-critical physical environments, crucial for deployment in the real world.
Self-Sensing for Proprioception and Contact Detection in Soft Robots Using Shape Memory Alloy Artificial Muscles
Sep 25, 2024


Estimating a soft robot's pose and applied forces, also called proprioception, is crucial for safe interaction of the robot with its environment. However, most solutions for soft robot proprioception use dedicated sensors, particularly for external forces, which introduce design trade-offs, rigidity, and risk of failure. This work presents an approach for pose estimation and contact detection for soft robots actuated by shape memory alloy (SMA) artificial muscles, using no dedicated force sensors. Our framework uses the unique material properties of SMAs to self-sense their internal stress, via offboard measurements of their electrical resistance and in-situ temperature readings, in an existing fully-soft limb design. We demonstrate that a simple polynomial regression model on these measurements is sufficient to predict the robot's pose, under no-contact conditions. Then, we show that if an additional measurement of the true pose is available (e.g. from an already-in-place bending sensor), it is possible to predict a binary contact/no-contact using multiple combinations of self-sensing signals. Our hardware tests verify our hypothesis via a contact detection test with a human operator. This proof-of-concept validates that self-sensing signals in soft SMA-actuated soft robots can be used for proprioception and contact detection, and suggests a direction for integrating proprioception into soft robots without design compromises. Future work could employ machine learning for enhanced accuracy.
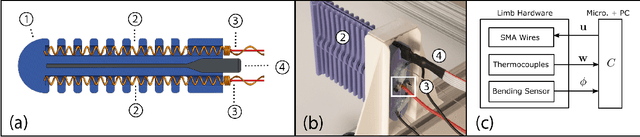
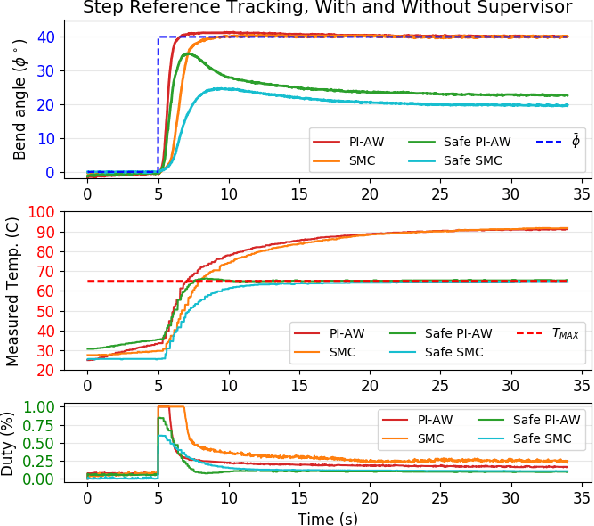
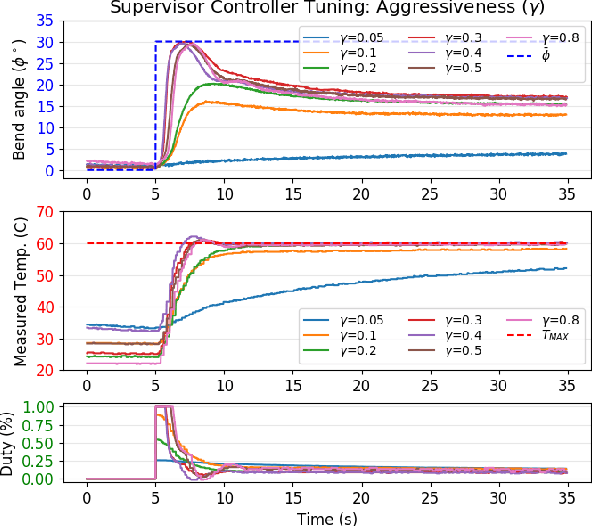
Maximizing Consistent Force Output for Shape Memory Alloy Artificial Muscles in Soft Robots
Feb 09, 2024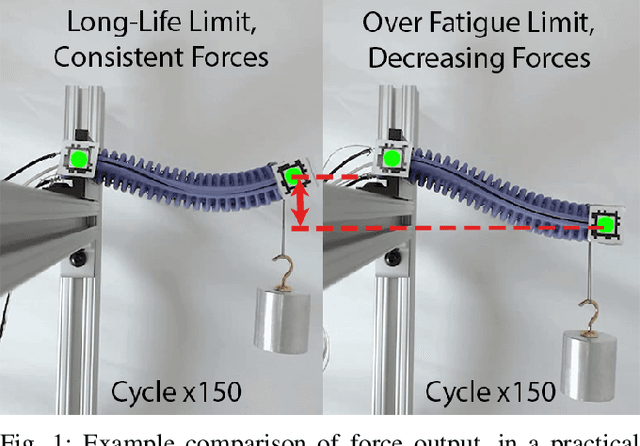
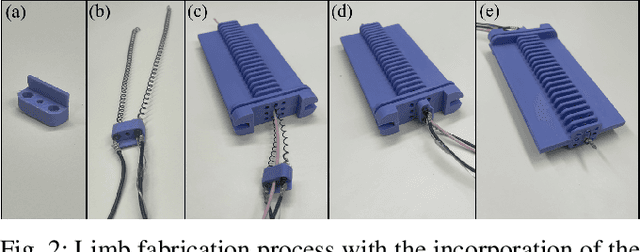
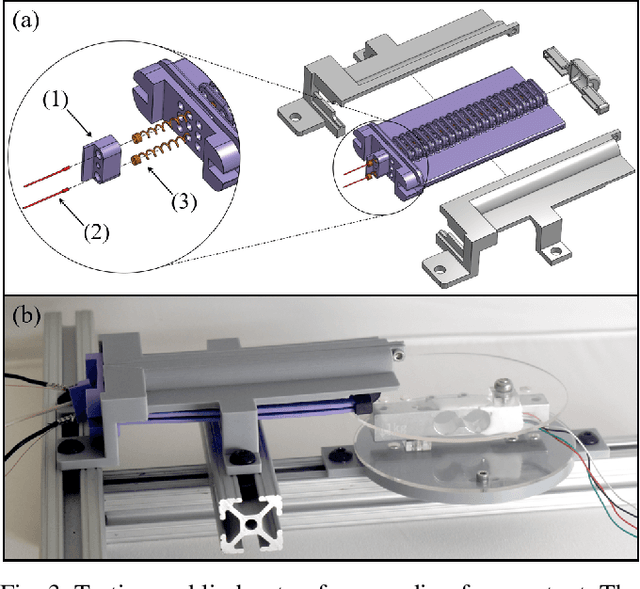
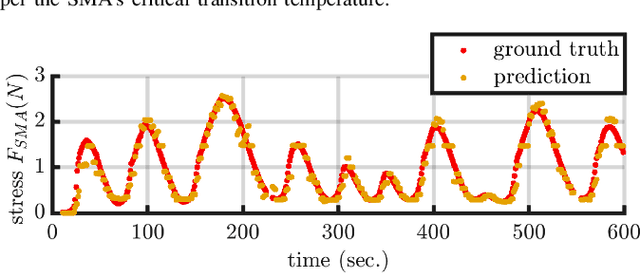
Soft robots have immense potential given their inherent safety and adaptability, but challenges in soft actuator forces and design constraints have limited scaling up soft robots to larger sizes. Electrothermal shape memory alloy (SMA) artificial muscles have the potential to create these large forces and high displacements, but consistently using these muscles under a well-defined model, in-situ in a soft robot, remains an open challenge. This article provides a system for maintaining the highest-possible consistent SMA forces, over long lifetimes, by combining a fatigue testing protocol with a supervisory control system for the muscles' internal temperature state. We propose a design of a soft limb with swap-able SMA muscles, and deploy the limb in a blocked-force test to quantify the relationship between the measured maximum force at different temperatures over different lifetimes. Then, by applying an invariance-based control system to maintain temperatures under our long-life limit, we demonstrate consistent high forces in a practical task over hundreds of cycles. The method we developed allows for practical implementation of SMAs in soft robots through characterizing and controlling their behavior in-situ, and provides a method to impose limits that maximize their consistent, repeatable behavior.
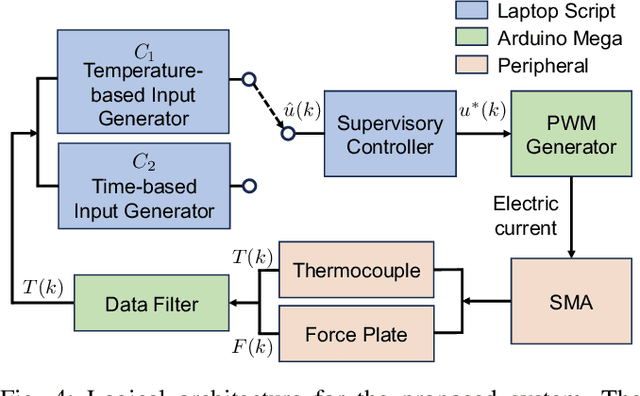
Safe Balancing Control of a Soft Legged Robot
Sep 27, 2022
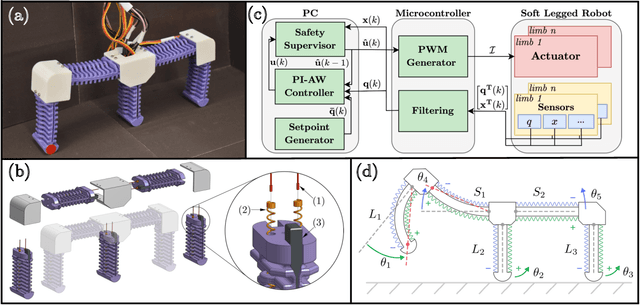
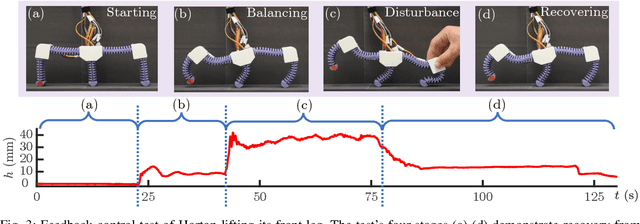
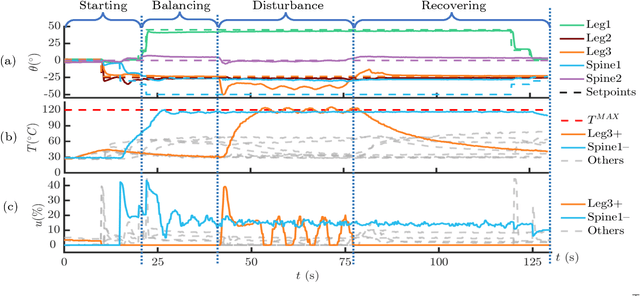
Legged robots constructed from soft materials are commonly claimed to demonstrate safer, more robust environmental interactions than their rigid counterparts. However, this motivating feature of soft robots requires more rigorous development for comparison to rigid locomotion. This article presents a soft legged robot platform, Horton, and a feedback control system with safety guarantees on some aspects of its operation. The robot is constructed using a series of soft limbs, actuated by thermal shape memory alloy (SMA) wire muscles, with sensors for its position and its actuator temperatures. A supervisory control scheme maintains safe actuator states during the operation of a separate controller for the robot's pose. Experiments demonstrate that Horton can lift its leg and maintain a balancing stance, a precursor to locomotion. The supervisor is verified in hardware via a human interaction test during balancing, keeping all SMA muscles below a temperature threshold. This work represents the first demonstration of a safety-verified feedback system on any soft legged robot.
Safe Supervisory Control of Soft Robot Actuators
Aug 02, 2022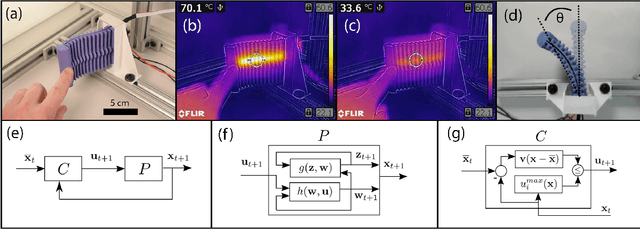
Although soft robots show safer interactions with their environment than traditional robots, soft mechanisms and actuators still have significant potential for damage or degradation particularly during unmodeled contact. This article introduces a feedback strategy for safe soft actuator operation during control of a soft robot. To do so, a supervisory controller monitors actuator state and dynamically saturates control inputs to avoid conditions that could lead to physical damage. We prove that, under certain conditions, the supervisory controller is stable and verifiably safe. We then demonstrate completely onboard operation of the supervisory controller using a soft thermally-actuated robot limb with embedded shape memory alloy (SMA) actuators and sensing. Tests performed with the supervisor verify its theoretical properties and show stabilization of the robot limb's pose in free space. Finally, experiments show that our approach prevents overheating during contact (including environmental constraints and human contact) or when infeasible motions are commanded. This supervisory controller, and its ability to be executed with completely onboard sensing, has the potential to make soft robot actuators reliable enough for practical use.
Learned Dynamics of Electrothermally-Actuated Soft Robot Limbs Using LSTM Neural Networks
Nov 08, 2021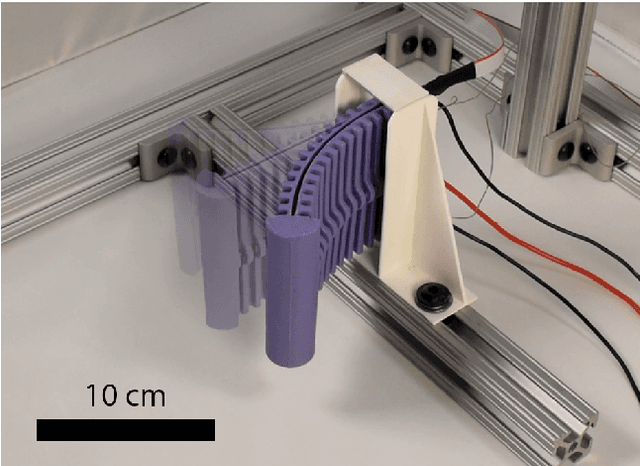
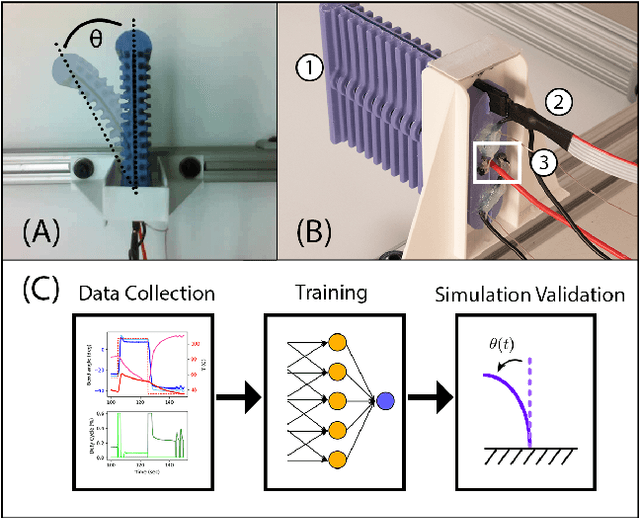
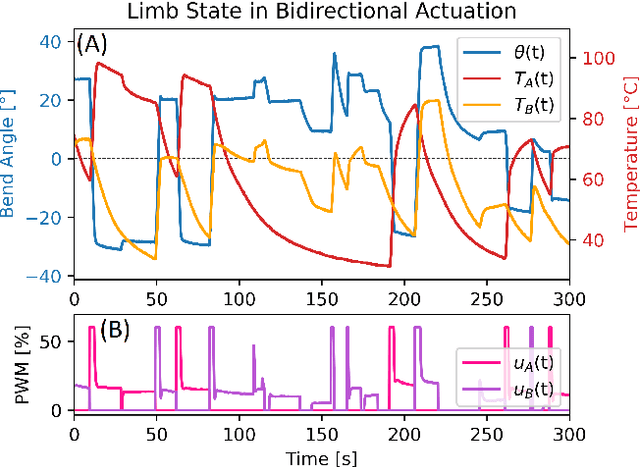
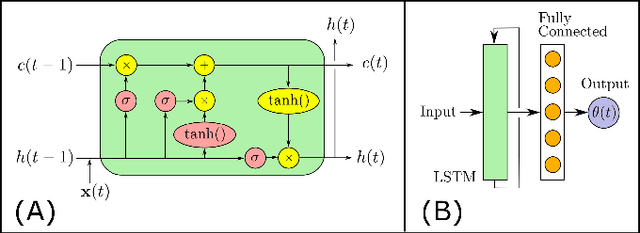
Modeling the dynamics of soft robot limbs with electrothermal actuators is generally challenging due to thermal and mechanical hysteresis and the complex physical interactions that can arise during robot operation. This article proposes a neural network based on long short-term memory (LSTM) to address these challenges in actuator modeling. A planar soft limb, actuated by a pair of shape memory alloy (SMA) coils and containing embedded sensors for temperature and angular deflection, is used as a test platform. Data from this robot are used to train LSTM neural networks, using different combinations of sensor data, to model both unidirectional (one SMA) and bidirectional (both SMAs) motion. Open-loop rollout results show that the learned model is able to predict motions over extraordinarily long open-loop timescales (10 minutes) with little drift. Prediction errors are on the order of the soft deflection sensor's accuracy, even when using only the actuator's pulse width modulation inputs for learning. These LSTM models can be used in-situ, without extensive sensing, helping to bring soft electrothermally-actuated robots into practical application.
Robust Control of a Multi-Axis Shape Memory Alloy-Driven Soft Manipulator
Oct 20, 2021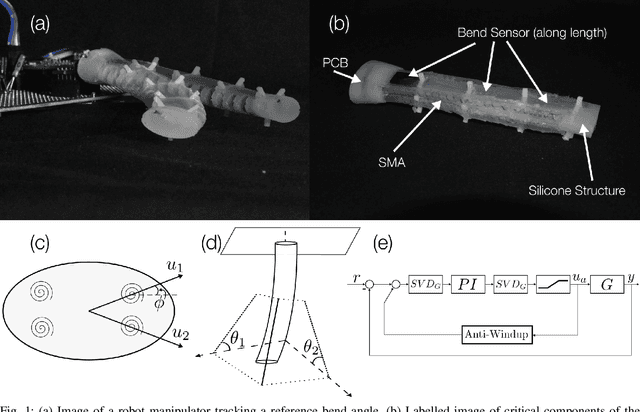

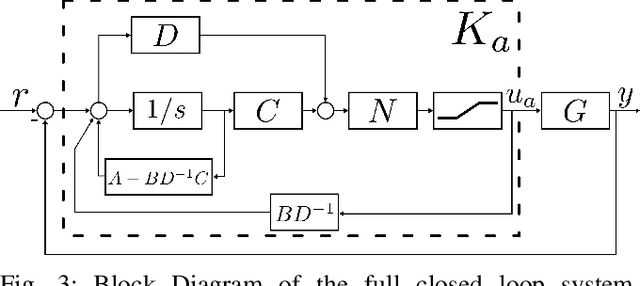
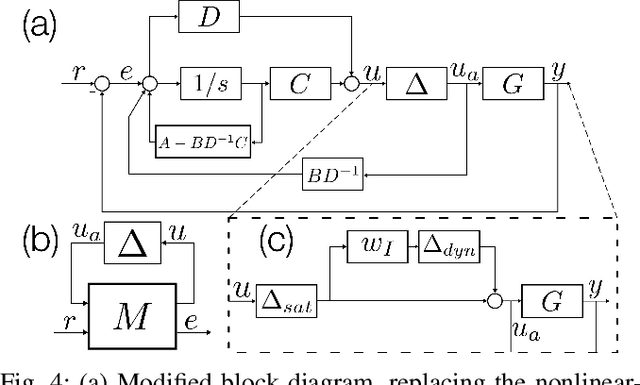
Control of soft robotic manipulators remains a challenge for designs with advanced capabilities and novel actuation. Two significant limitations are multi-axis, three-dimensional motion of soft bodies alongside actuator dynamics and constraints, both of which are present in shape-memory-alloy (SMA)-powered soft robots. This article addresses both concerns with a robust feedback control scheme, demonstrating state tracking control for a soft robot manipulator of this type. Our controller uses a static beam bending model to approximate the soft limb as an LTI system, alongside a singular-value-decomposition compensator approach to decouple the multi-axial motion and an anti-windup element for the actuator saturation. We prove stability and verify robustness of our controller, with robustness intended to account for the unmodeled dynamics. Our implementation is verified in hardware tests of a soft SMA-powered limb, showing low tracking error, with promising results for future multi-limbed robots.