 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearned Dynamics of Electrothermally-Actuated Soft Robot Limbs Using LSTM Neural Networks
Paper and Code
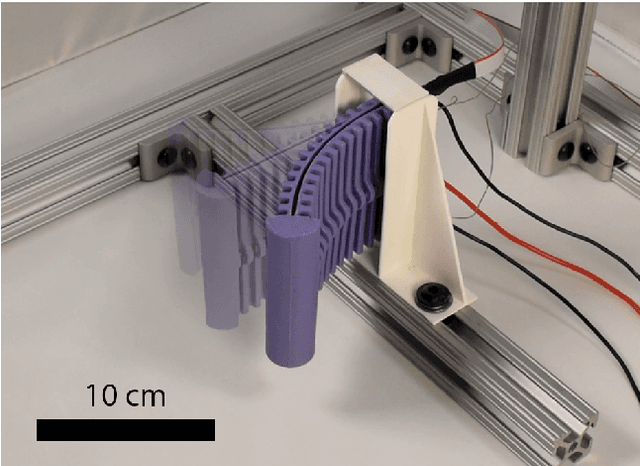
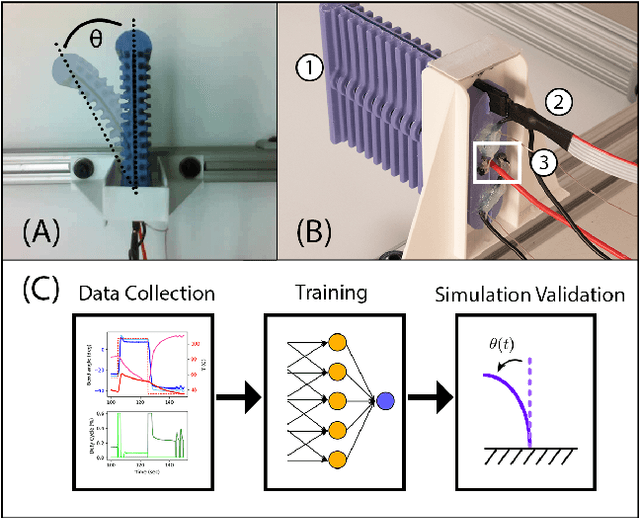
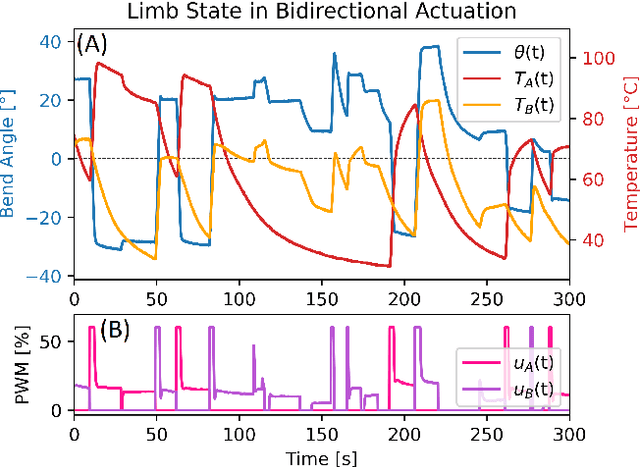
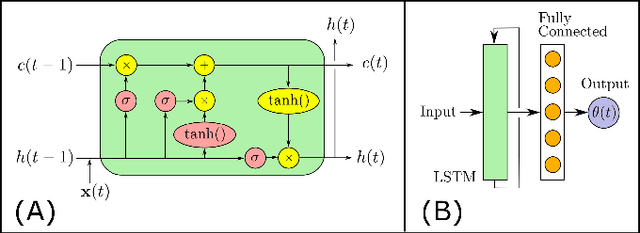
Modeling the dynamics of soft robot limbs with electrothermal actuators is generally challenging due to thermal and mechanical hysteresis and the complex physical interactions that can arise during robot operation. This article proposes a neural network based on long short-term memory (LSTM) to address these challenges in actuator modeling. A planar soft limb, actuated by a pair of shape memory alloy (SMA) coils and containing embedded sensors for temperature and angular deflection, is used as a test platform. Data from this robot are used to train LSTM neural networks, using different combinations of sensor data, to model both unidirectional (one SMA) and bidirectional (both SMAs) motion. Open-loop rollout results show that the learned model is able to predict motions over extraordinarily long open-loop timescales (10 minutes) with little drift. Prediction errors are on the order of the soft deflection sensor's accuracy, even when using only the actuator's pulse width modulation inputs for learning. These LSTM models can be used in-situ, without extensive sensing, helping to bring soft electrothermally-actuated robots into practical application.