 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory Optimization for Thermally-Actuated Soft Planar Robot Limbs
Paper and Code
Oct 18, 2021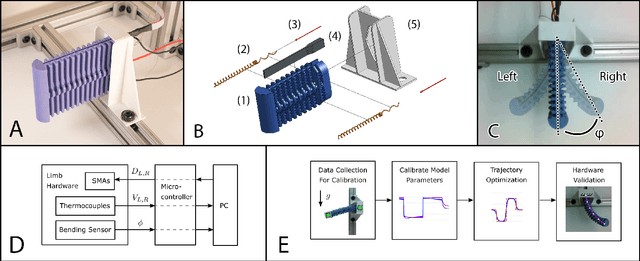
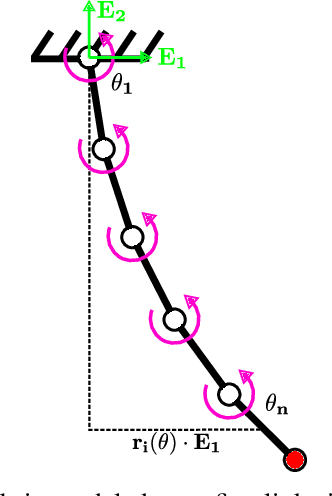

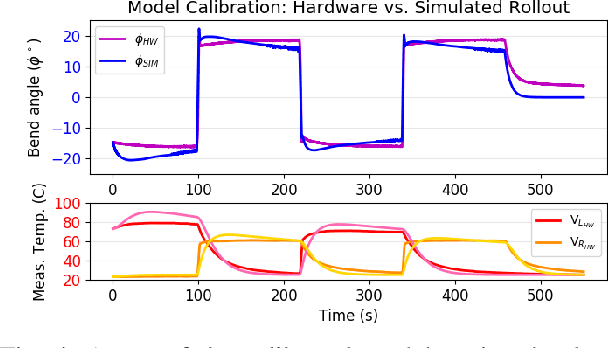
Practical use of robotic manipulators made from soft materials will require planning for complex motions. We present the first approach for generating trajectories of a thermally-actuated soft robotic manipulator. Based on simplified approximations of the soft arm and its shape-memory-alloy (SMA) wires, we justify a dynamics model of a discretized rigid manipulator with joint torques proportional to wire temperature. Then, we propose a method to calibrate this model from hardware data, and demonstrate that the simulation aligns well with a test trajectory. Finally, we use direct collocation trajectory optimization with the non-linear dynamics to derive open-loop controls for feasible trajectories that closely align with desired reference inputs. Two example trajectories are verified in hardware. The results show promise for both open-loop planning as well as for future applications with feedback.