 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Control of a Multi-Axis Shape Memory Alloy-Driven Soft Manipulator
Paper and Code
Oct 20, 2021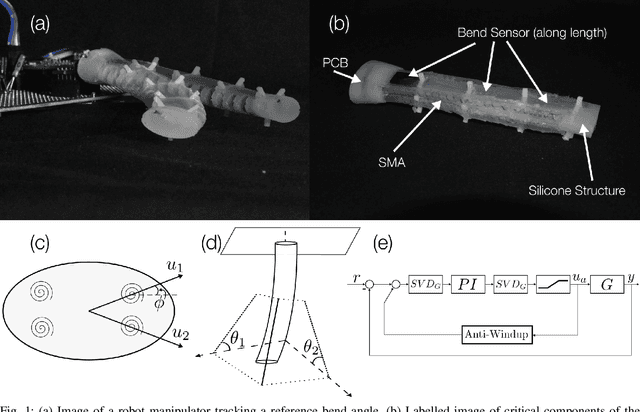

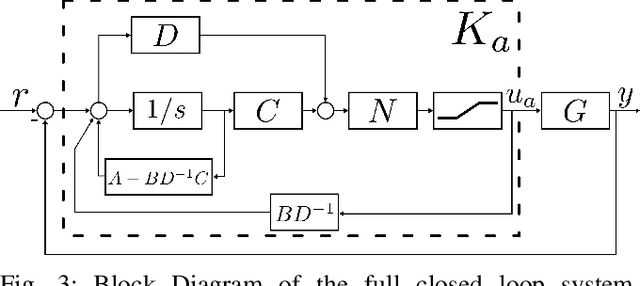
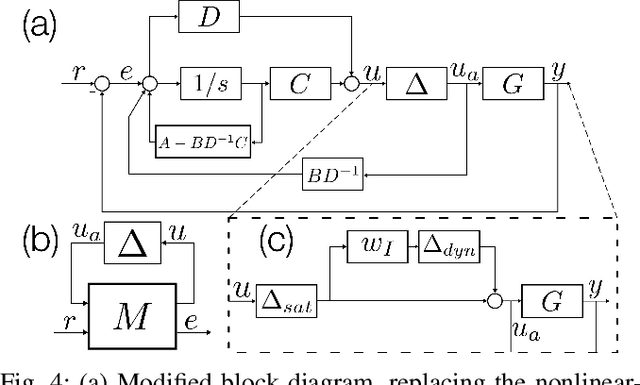
Control of soft robotic manipulators remains a challenge for designs with advanced capabilities and novel actuation. Two significant limitations are multi-axis, three-dimensional motion of soft bodies alongside actuator dynamics and constraints, both of which are present in shape-memory-alloy (SMA)-powered soft robots. This article addresses both concerns with a robust feedback control scheme, demonstrating state tracking control for a soft robot manipulator of this type. Our controller uses a static beam bending model to approximate the soft limb as an LTI system, alongside a singular-value-decomposition compensator approach to decouple the multi-axial motion and an anti-windup element for the actuator saturation. We prove stability and verify robustness of our controller, with robustness intended to account for the unmodeled dynamics. Our implementation is verified in hardware tests of a soft SMA-powered limb, showing low tracking error, with promising results for future multi-limbed robots.