 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Autonomous Environmental Contact for Soft Robots using Control Barrier Functions
Apr 20, 2025Robots built from soft materials will inherently apply lower environmental forces than their rigid counterparts, and therefore may be more suitable in sensitive settings with unintended contact. However, these robots' applied forces result from both their design and their control system in closed-loop, and therefore, ensuring bounds on these forces requires controller synthesis for safety as well. This article introduces the first feedback controller for a soft manipulator that formally meets a safety specification with respect to environmental contact. In our proof-of-concept setting, the robot's environment has known geometry and is deformable with a known elastic modulus. Our approach maps a bound on applied forces to a safe set of positions of the robot's tip via predicted deformations of the environment. Then, a quadratic program with Control Barrier Functions in its constraints is used to supervise a nominal feedback signal, verifiably maintaining the robot's tip within this safe set. Hardware experiments on a multi-segment soft pneumatic robot demonstrate that the proposed framework successfully constrains its environmental contact forces. This framework represents a fundamental shift in perspective on control and safety for soft robots, defining and implementing a formally verifiable logic specification on their pose and contact forces.
Improving Efficiency of Sampling-based Motion Planning via Message-Passing Monte Carlo
Oct 04, 2024Sampling-based motion planning methods, while effective in high-dimensional spaces, often suffer from inefficiencies due to irregular sampling distributions, leading to suboptimal exploration of the configuration space. In this paper, we propose an approach that enhances the efficiency of these methods by utilizing low-discrepancy distributions generated through Message-Passing Monte Carlo (MPMC). MPMC leverages Graph Neural Networks (GNNs) to generate point sets that uniformly cover the space, with uniformity assessed using the the $\cL_p$-discrepancy measure, which quantifies the irregularity of sample distributions. By improving the uniformity of the point sets, our approach significantly reduces computational overhead and the number of samples required for solving motion planning problems. Experimental results demonstrate that our method outperforms traditional sampling techniques in terms of planning efficiency.
Design and Control of Modular Soft-Rigid Hybrid Manipulators with Self-Contact
Aug 17, 2024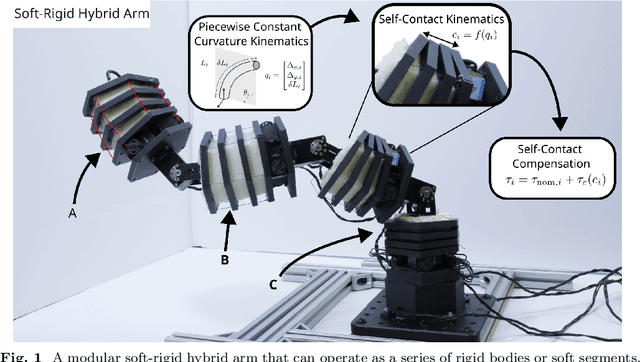
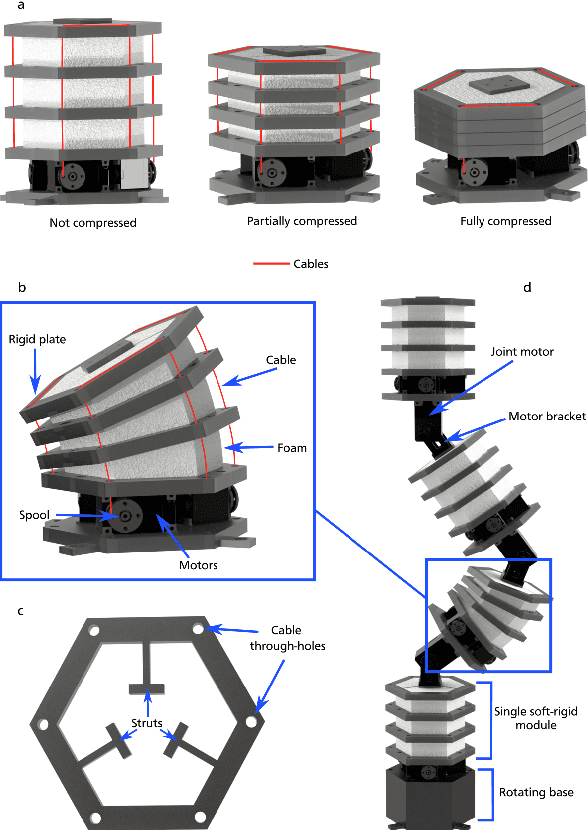
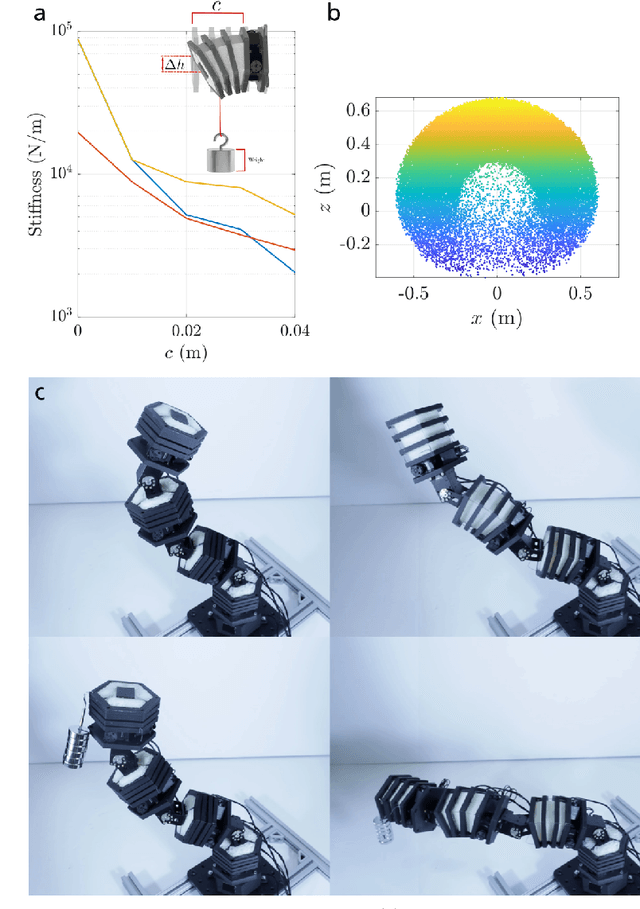
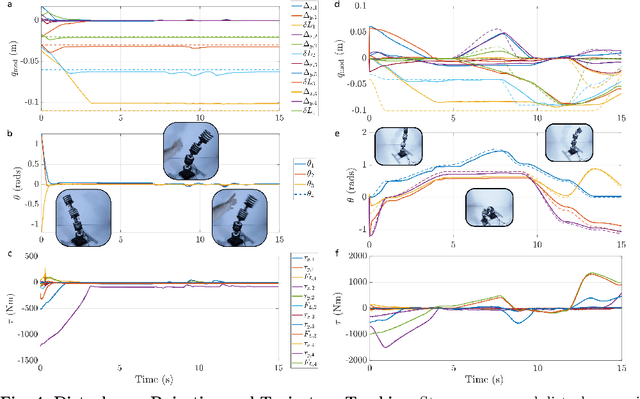
Soft robotics focuses on designing robots with highly deformable materials, allowing them to adapt and operate safely and reliably in unstructured and variable environments. While soft robots offer increased compliance over rigid body robots, their payloads are limited, and they consume significant energy when operating against gravity in terrestrial environments. To address the carrying capacity limitation, we introduce a novel class of soft-rigid hybrid robot manipulators (SRH) that incorporates both soft continuum modules and rigid joints in a serial configuration. The SRH manipulators can seamlessly transition between being compliant and delicate to rigid and strong, achieving this through dynamic shape modulation and employing self-contact among rigid components to effectively form solid structures. We discuss the design and fabrication of SRH robots, and present a class of novel control algorithms for SRH systems. We propose a configuration space PD+ shape controller and a Cartesian impedance controller, both of which are provably stable, endowing the soft robot with the necessary low-level capabilities. We validate the controllers on SRH hardware and demonstrate the robot performing several tasks. Our results highlight the potential for the soft-rigid hybrid paradigm to produce robots that are both physically safe and effective at task performance.
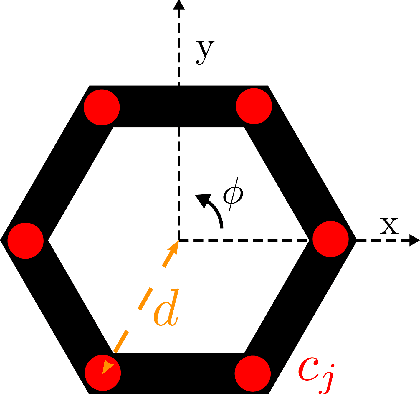
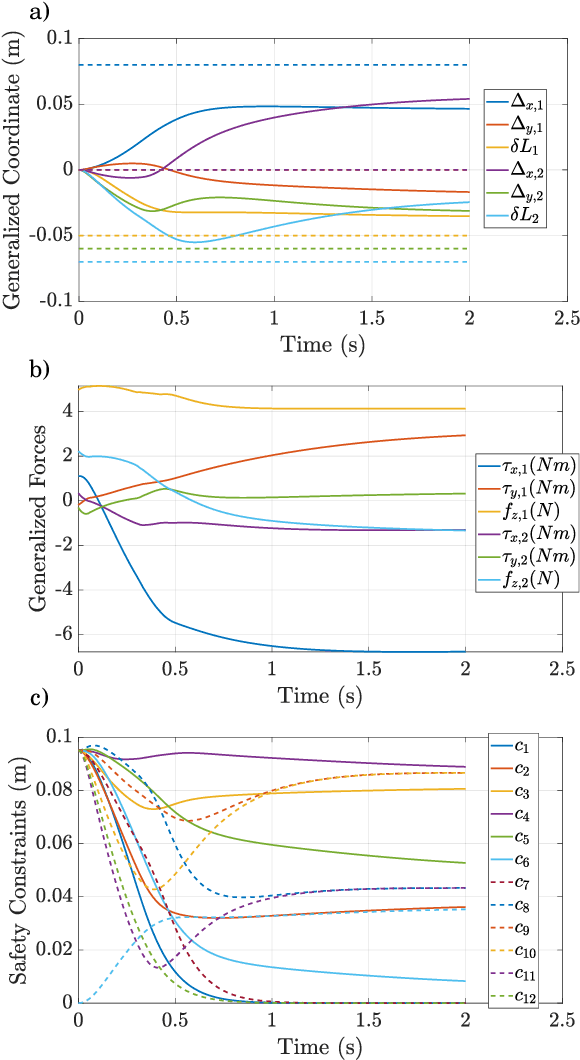
Modeling and Control of Intrinsically Elasticity Coupled Soft-Rigid Robots
Nov 09, 2023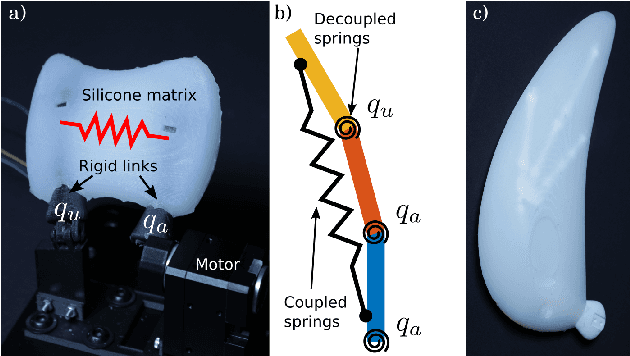



While much work has been done recently in the realm of model-based control of soft robots and soft-rigid hybrids, most works examine robots that have an inherently serial structure. While these systems have been prevalent in the literature, there is an increasing trend toward designing soft-rigid hybrids with intrinsically coupled elasticity between various degrees of freedom. In this work, we seek to address the issues of modeling and controlling such structures, particularly when underactuated. We introduce several simple models for elastic coupling, typical of those seen in these systems. We then propose a controller that compensates for the elasticity, and we prove its stability with Lyapunov methods without relying on the elastic dominance assumption. This controller is applicable to the general class of underactuated soft robots. After evaluating the controller in simulated cases, we then develop a simple hardware platform to evaluate both the models and the controller. Finally, using the hardware, we demonstrate a novel use case for underactuated, elastically coupled systems in "sensorless" force control.
Safe Control for Soft-Rigid Robots with Self-Contact using Control Barrier Functions
Nov 06, 2023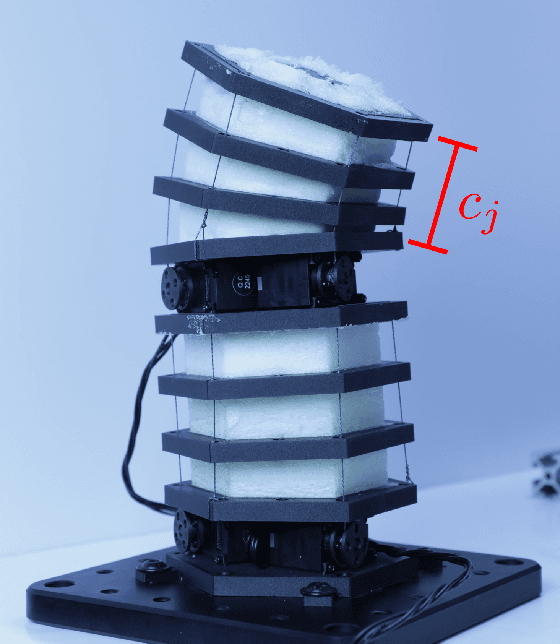

Incorporating both flexible and rigid components in robot designs offers a unique solution to the limitations of traditional rigid robotics by enabling both compliance and strength. This paper explores the challenges and solutions for controlling soft-rigid hybrid robots, particularly addressing the issue of self-contact. Conventional control methods prioritize precise state tracking, inadvertently increasing the system's overall stiffness, which is not always desirable in interactions with the environment or within the robot itself. To address this, we investigate the application of Control Barrier Functions (CBFs) and High Order CBFs to manage self-contact scenarios in serially connected soft-rigid hybrid robots. Through an analysis based on Piecewise Constant Curvature (PCC) kinematics, we establish CBFs within a classical control framework for self-contact dynamics. Our methodology is rigorously evaluated in both simulation environments and physical hardware systems. The findings demonstrate that our proposed control strategy effectively regulates self-contact in soft-rigid hybrid robotic systems, marking a significant advancement in the field of robotics.
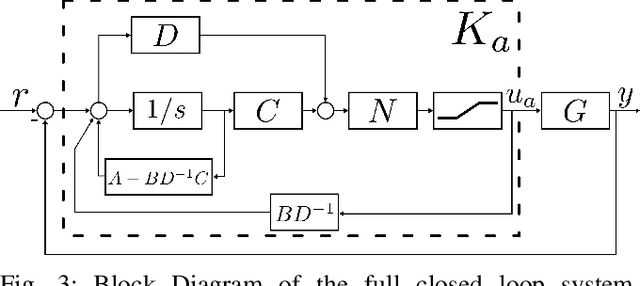
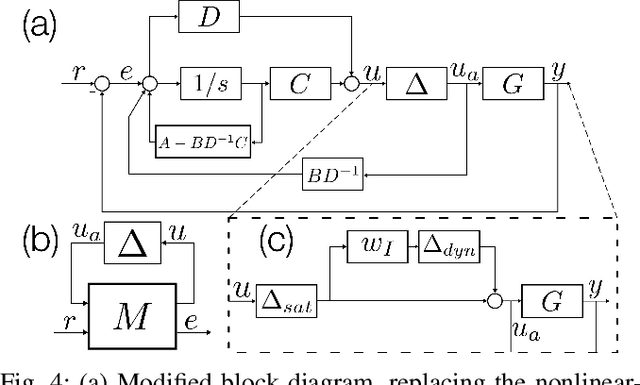
Safe Supervisory Control of Soft Robot Actuators
Aug 02, 2022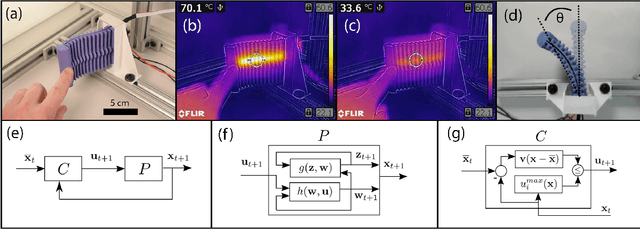
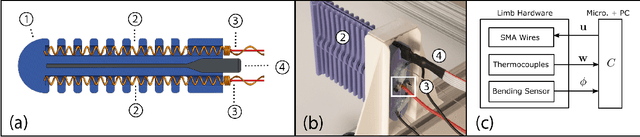
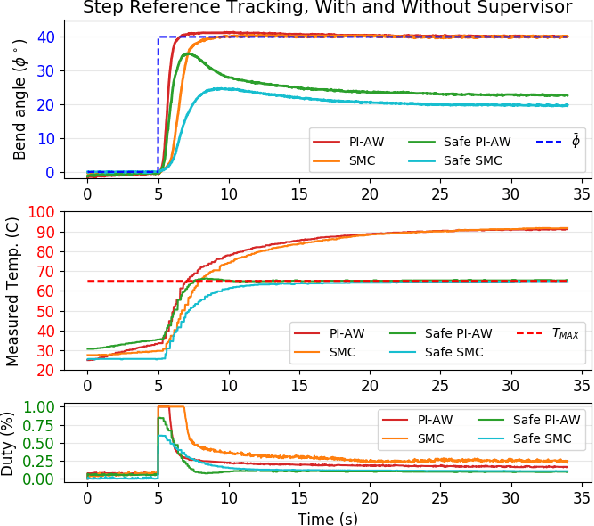
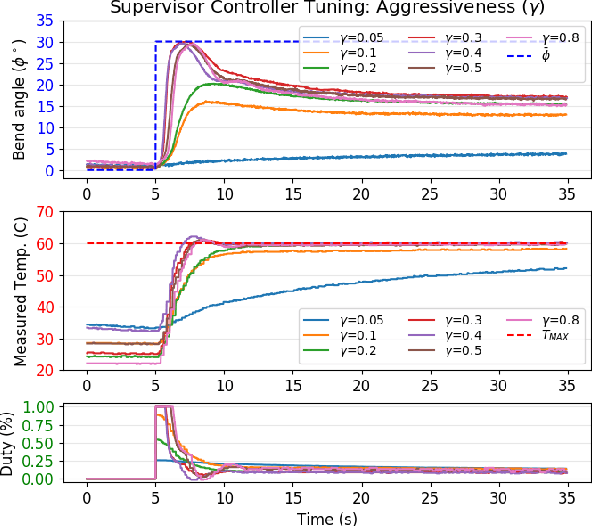
Although soft robots show safer interactions with their environment than traditional robots, soft mechanisms and actuators still have significant potential for damage or degradation particularly during unmodeled contact. This article introduces a feedback strategy for safe soft actuator operation during control of a soft robot. To do so, a supervisory controller monitors actuator state and dynamically saturates control inputs to avoid conditions that could lead to physical damage. We prove that, under certain conditions, the supervisory controller is stable and verifiably safe. We then demonstrate completely onboard operation of the supervisory controller using a soft thermally-actuated robot limb with embedded shape memory alloy (SMA) actuators and sensing. Tests performed with the supervisor verify its theoretical properties and show stabilization of the robot limb's pose in free space. Finally, experiments show that our approach prevents overheating during contact (including environmental constraints and human contact) or when infeasible motions are commanded. This supervisory controller, and its ability to be executed with completely onboard sensing, has the potential to make soft robot actuators reliable enough for practical use.
Robust Control of a Multi-Axis Shape Memory Alloy-Driven Soft Manipulator
Oct 20, 2021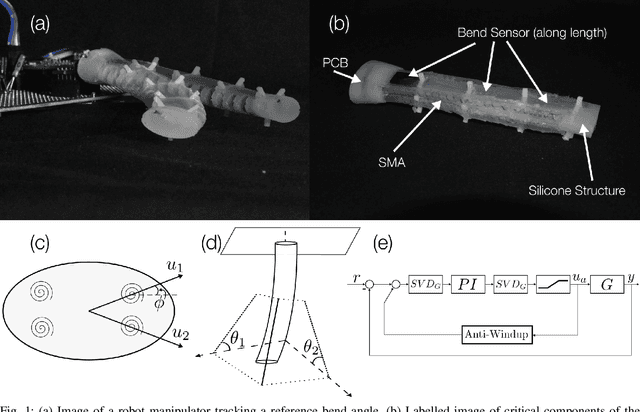

Control of soft robotic manipulators remains a challenge for designs with advanced capabilities and novel actuation. Two significant limitations are multi-axis, three-dimensional motion of soft bodies alongside actuator dynamics and constraints, both of which are present in shape-memory-alloy (SMA)-powered soft robots. This article addresses both concerns with a robust feedback control scheme, demonstrating state tracking control for a soft robot manipulator of this type. Our controller uses a static beam bending model to approximate the soft limb as an LTI system, alongside a singular-value-decomposition compensator approach to decouple the multi-axial motion and an anti-windup element for the actuator saturation. We prove stability and verify robustness of our controller, with robustness intended to account for the unmodeled dynamics. Our implementation is verified in hardware tests of a soft SMA-powered limb, showing low tracking error, with promising results for future multi-limbed robots.
An Untethered Brittle Star Robot for Closed-Loop Underwater Locomotion
Mar 30, 2020
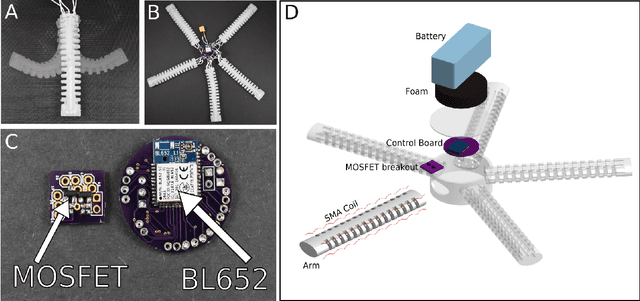
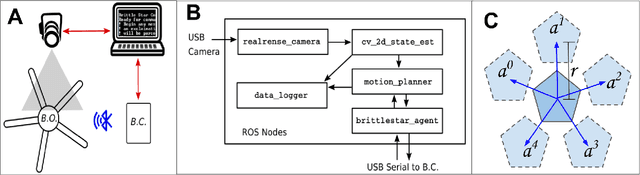
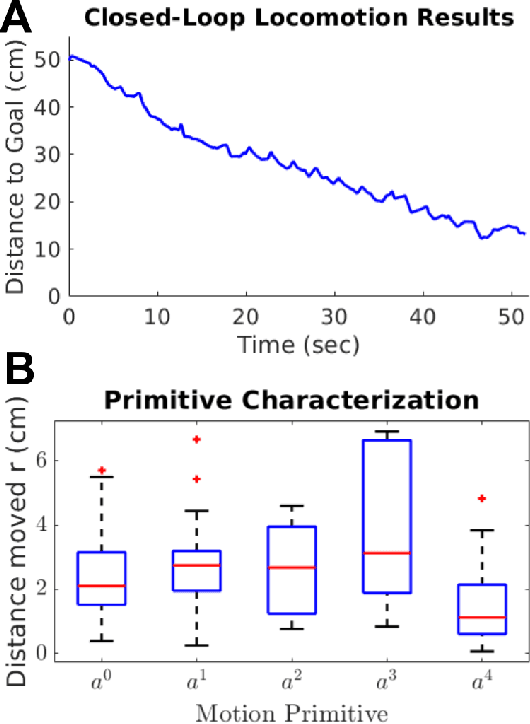
Soft robots are capable of inherently safer and more stable interactions with their environment since they can mechanically deform in response to unanticipated interactions. However, their complex mechanics can make operation difficult, particularly with tasks such as locomotion, and robust systems are needed for evaluating and testing new planning and control algorithms. In this work, we present the first mobile and untethered underwater crawling soft robot. PATRICK is a robotic testbed inspired by brittle stars that demonstrates closed-loop locomotion planning. PATRICK contains five soft legs actuated by a total of 20 shape-memory-alloy (SMA) wires, providing a rich variety of possible motions. This testbed is the first instance of real-time position tracking for an untethered soft crawling robot. Experiments demonstrate that a motion planner can command the robot to locomote to a goal state, given a simple set of motion primitives. This work demonstrates progress toward full autonomy of soft, mobile robotic systems