 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Untethered Brittle Star Robot for Closed-Loop Underwater Locomotion
Paper and Code

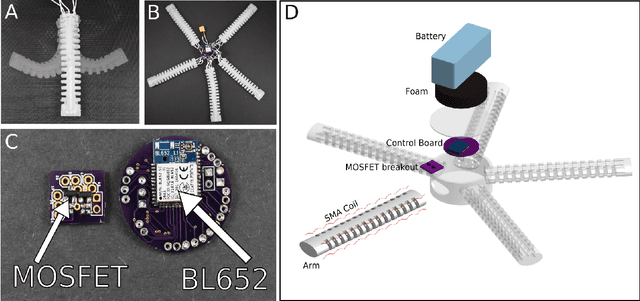
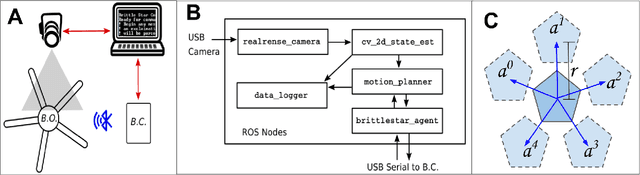
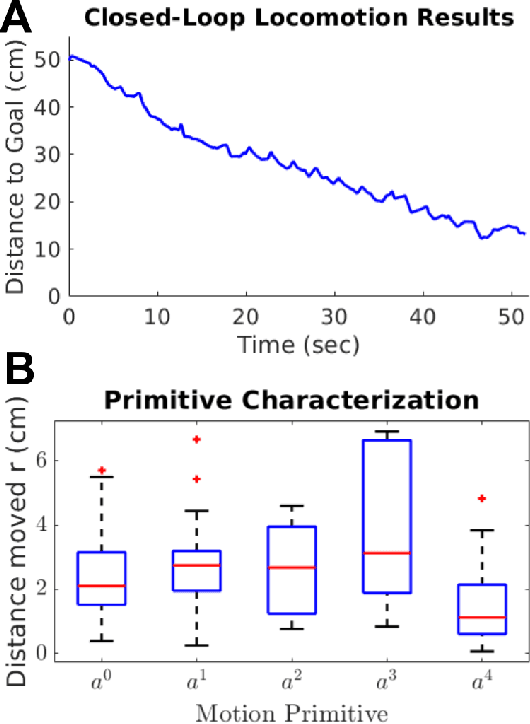
Soft robots are capable of inherently safer and more stable interactions with their environment since they can mechanically deform in response to unanticipated interactions. However, their complex mechanics can make operation difficult, particularly with tasks such as locomotion, and robust systems are needed for evaluating and testing new planning and control algorithms. In this work, we present the first mobile and untethered underwater crawling soft robot. PATRICK is a robotic testbed inspired by brittle stars that demonstrates closed-loop locomotion planning. PATRICK contains five soft legs actuated by a total of 20 shape-memory-alloy (SMA) wires, providing a rich variety of possible motions. This testbed is the first instance of real-time position tracking for an untethered soft crawling robot. Experiments demonstrate that a motion planner can command the robot to locomote to a goal state, given a simple set of motion primitives. This work demonstrates progress toward full autonomy of soft, mobile robotic systems