 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Control of Modular Soft-Rigid Hybrid Manipulators with Self-Contact
Paper and Code
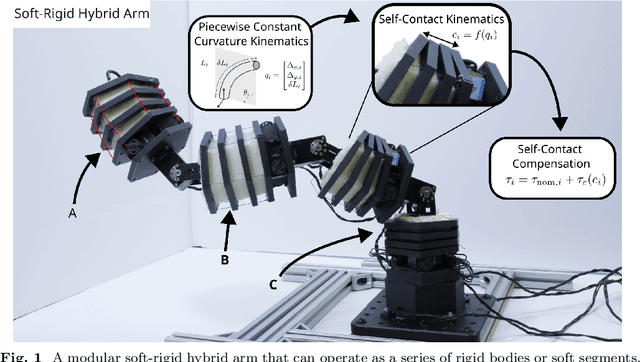
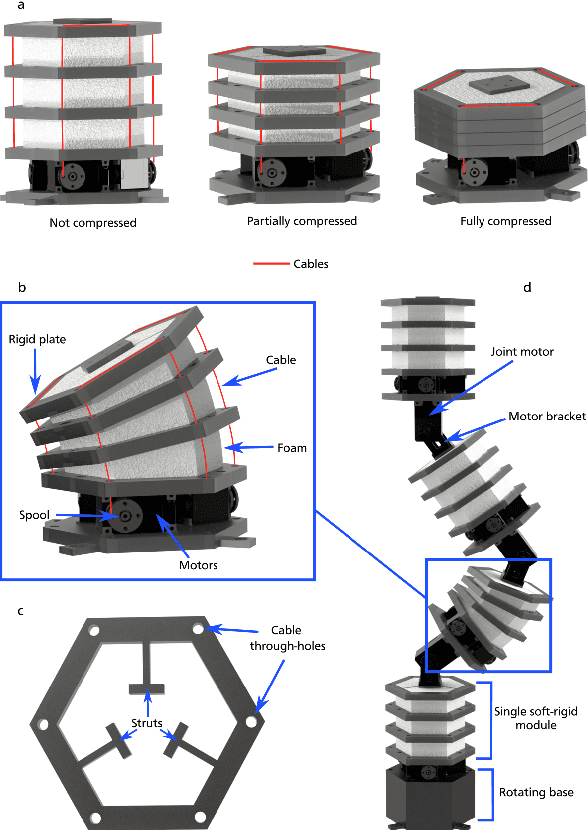
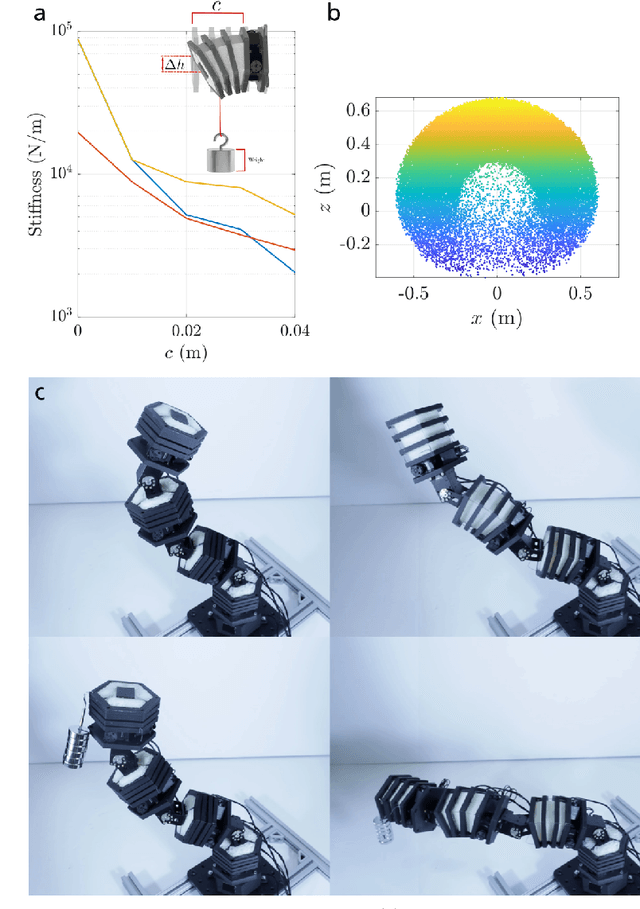
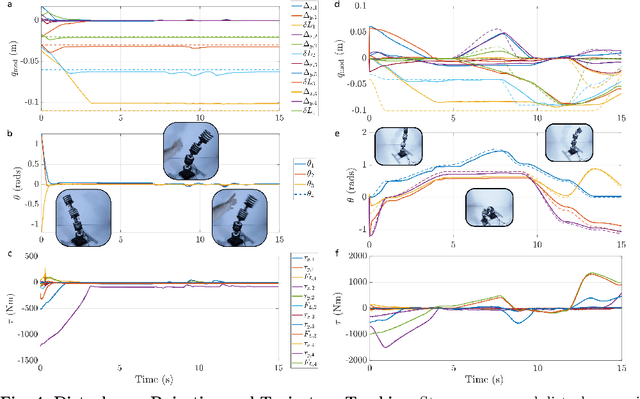
Soft robotics focuses on designing robots with highly deformable materials, allowing them to adapt and operate safely and reliably in unstructured and variable environments. While soft robots offer increased compliance over rigid body robots, their payloads are limited, and they consume significant energy when operating against gravity in terrestrial environments. To address the carrying capacity limitation, we introduce a novel class of soft-rigid hybrid robot manipulators (SRH) that incorporates both soft continuum modules and rigid joints in a serial configuration. The SRH manipulators can seamlessly transition between being compliant and delicate to rigid and strong, achieving this through dynamic shape modulation and employing self-contact among rigid components to effectively form solid structures. We discuss the design and fabrication of SRH robots, and present a class of novel control algorithms for SRH systems. We propose a configuration space PD+ shape controller and a Cartesian impedance controller, both of which are provably stable, endowing the soft robot with the necessary low-level capabilities. We validate the controllers on SRH hardware and demonstrate the robot performing several tasks. Our results highlight the potential for the soft-rigid hybrid paradigm to produce robots that are both physically safe and effective at task performance.