 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Sea Turtle Robot for Marine Fieldwork
Feb 24, 2026Autonomous robots can transform how we observe marine ecosystems, but close-range operation in reefs and other cluttered habitats remains difficult. Vehicles must maneuver safely near animals and fragile structures while coping with currents, variable illumination and limited sensing. Previous approaches simplify these problems by leveraging soft materials and bioinspired swimming designs, but such platforms remain limited in terms of deployable autonomy. Here we present a sea turtle-inspired autonomous underwater robot that closed the gap between bioinspired locomotion and field-ready autonomy through a tightly integrated, vision-driven control stack. The robot combines robust depth-heading stabilization with obstacle avoidance and target-centric control, enabling it to track and interact with moving objects in complex terrain. We validate the robot in controlled pool experiments and in a live coral reef exhibit at the New England Aquarium, demonstrating stable operation and reliable tracking of fast-moving marine animals and human divers. To the best of our knowledge, this is the first integrated biomimetic robotic system, combining novel hardware, control, and field experiments, deployed to track and monitor real marine animals in their natural environment. During off-tether experiments, we demonstrate safe navigation around obstacles (91\% success rate in the aquarium exhibit) and introduce a low-compute onboard tracking mode. Together, these results establish a practical route toward soft-rigid hybrid, bioinspired underwater robots capable of minimally disruptive exploration and close-range monitoring in sensitive ecosystems.
Design and Control of Modular Soft-Rigid Hybrid Manipulators with Self-Contact
Aug 17, 2024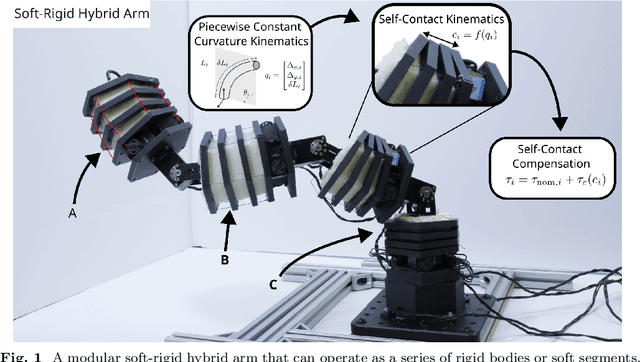
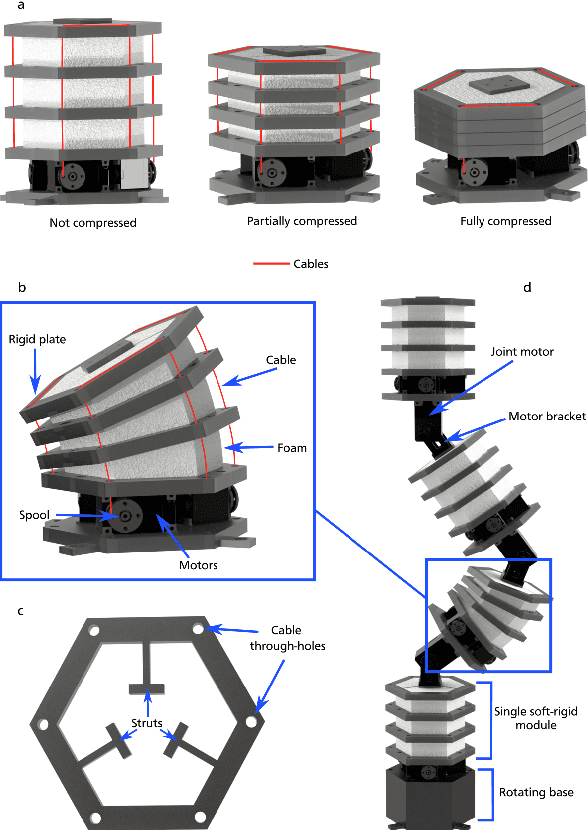
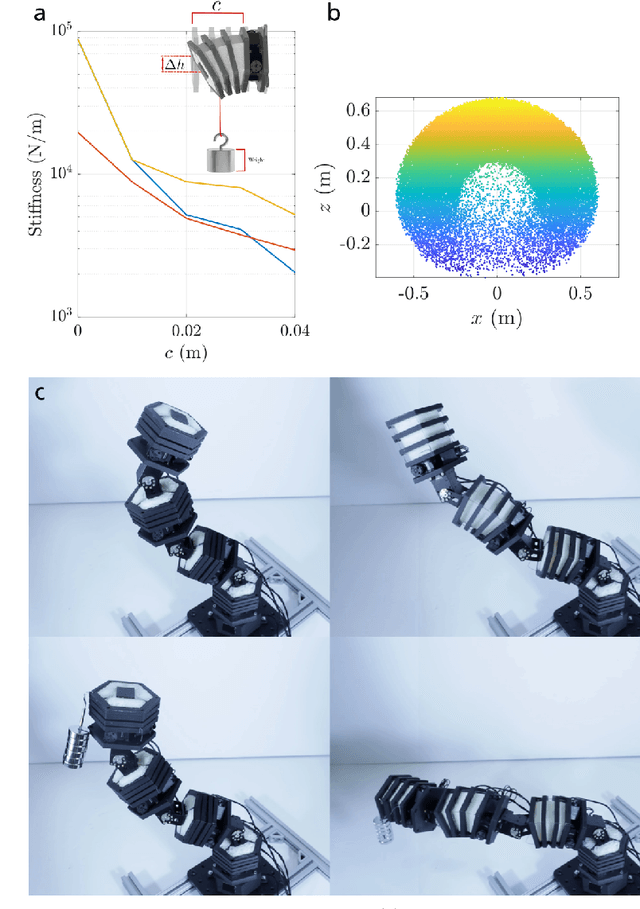
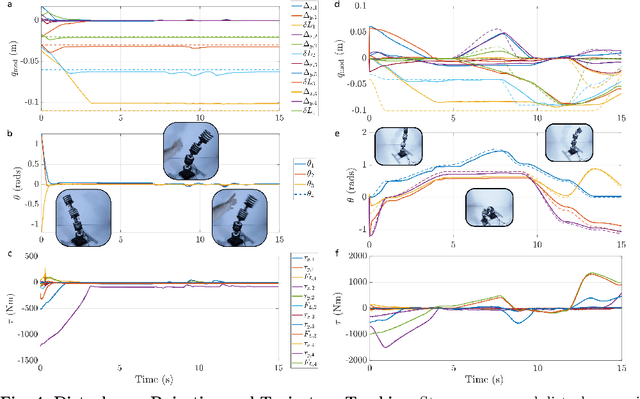
Soft robotics focuses on designing robots with highly deformable materials, allowing them to adapt and operate safely and reliably in unstructured and variable environments. While soft robots offer increased compliance over rigid body robots, their payloads are limited, and they consume significant energy when operating against gravity in terrestrial environments. To address the carrying capacity limitation, we introduce a novel class of soft-rigid hybrid robot manipulators (SRH) that incorporates both soft continuum modules and rigid joints in a serial configuration. The SRH manipulators can seamlessly transition between being compliant and delicate to rigid and strong, achieving this through dynamic shape modulation and employing self-contact among rigid components to effectively form solid structures. We discuss the design and fabrication of SRH robots, and present a class of novel control algorithms for SRH systems. We propose a configuration space PD+ shape controller and a Cartesian impedance controller, both of which are provably stable, endowing the soft robot with the necessary low-level capabilities. We validate the controllers on SRH hardware and demonstrate the robot performing several tasks. Our results highlight the potential for the soft-rigid hybrid paradigm to produce robots that are both physically safe and effective at task performance.
Safe Control for Soft-Rigid Robots with Self-Contact using Control Barrier Functions
Nov 06, 2023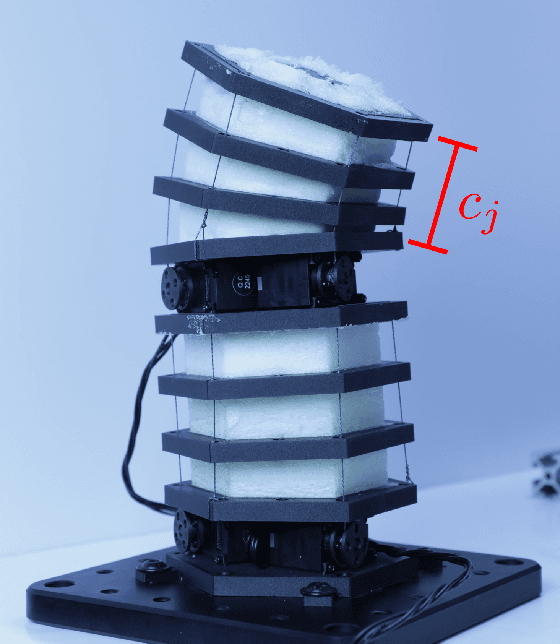
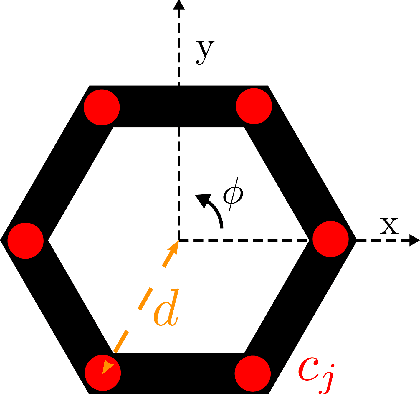
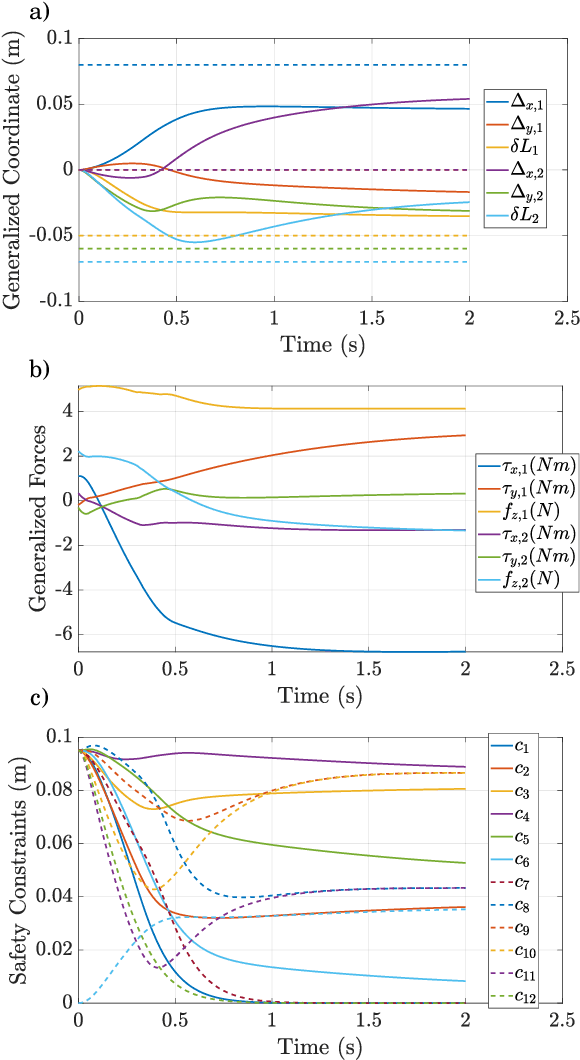

Incorporating both flexible and rigid components in robot designs offers a unique solution to the limitations of traditional rigid robotics by enabling both compliance and strength. This paper explores the challenges and solutions for controlling soft-rigid hybrid robots, particularly addressing the issue of self-contact. Conventional control methods prioritize precise state tracking, inadvertently increasing the system's overall stiffness, which is not always desirable in interactions with the environment or within the robot itself. To address this, we investigate the application of Control Barrier Functions (CBFs) and High Order CBFs to manage self-contact scenarios in serially connected soft-rigid hybrid robots. Through an analysis based on Piecewise Constant Curvature (PCC) kinematics, we establish CBFs within a classical control framework for self-contact dynamics. Our methodology is rigorously evaluated in both simulation environments and physical hardware systems. The findings demonstrate that our proposed control strategy effectively regulates self-contact in soft-rigid hybrid robotic systems, marking a significant advancement in the field of robotics.