 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotionLM: Multi-Agent Motion Forecasting as Language Modeling
Sep 28, 2023Reliable forecasting of the future behavior of road agents is a critical component to safe planning in autonomous vehicles. Here, we represent continuous trajectories as sequences of discrete motion tokens and cast multi-agent motion prediction as a language modeling task over this domain. Our model, MotionLM, provides several advantages: First, it does not require anchors or explicit latent variable optimization to learn multimodal distributions. Instead, we leverage a single standard language modeling objective, maximizing the average log probability over sequence tokens. Second, our approach bypasses post-hoc interaction heuristics where individual agent trajectory generation is conducted prior to interactive scoring. Instead, MotionLM produces joint distributions over interactive agent futures in a single autoregressive decoding process. In addition, the model's sequential factorization enables temporally causal conditional rollouts. The proposed approach establishes new state-of-the-art performance for multi-agent motion prediction on the Waymo Open Motion Dataset, ranking 1st on the interactive challenge leaderboard.
Inclined Surface Locomotion Strategies for Spherical Tensegrity Robots
Aug 27, 2017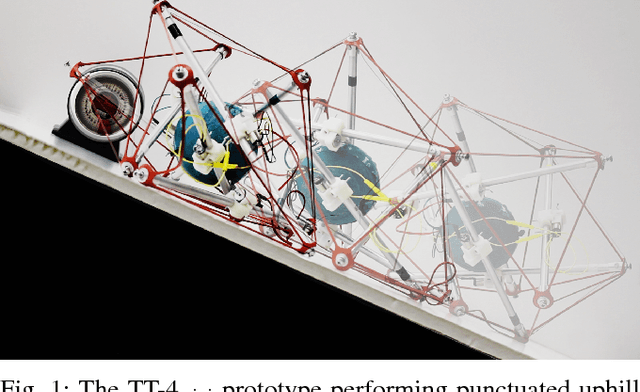
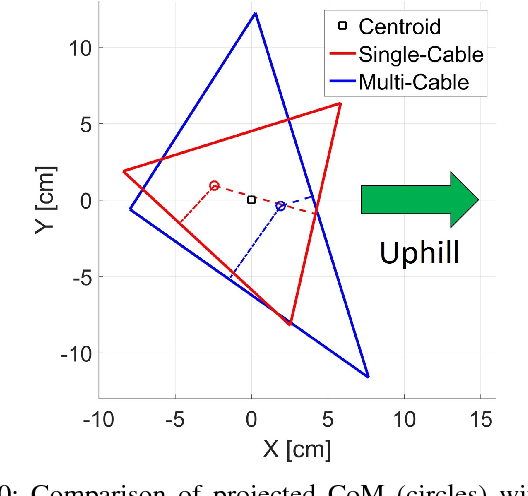
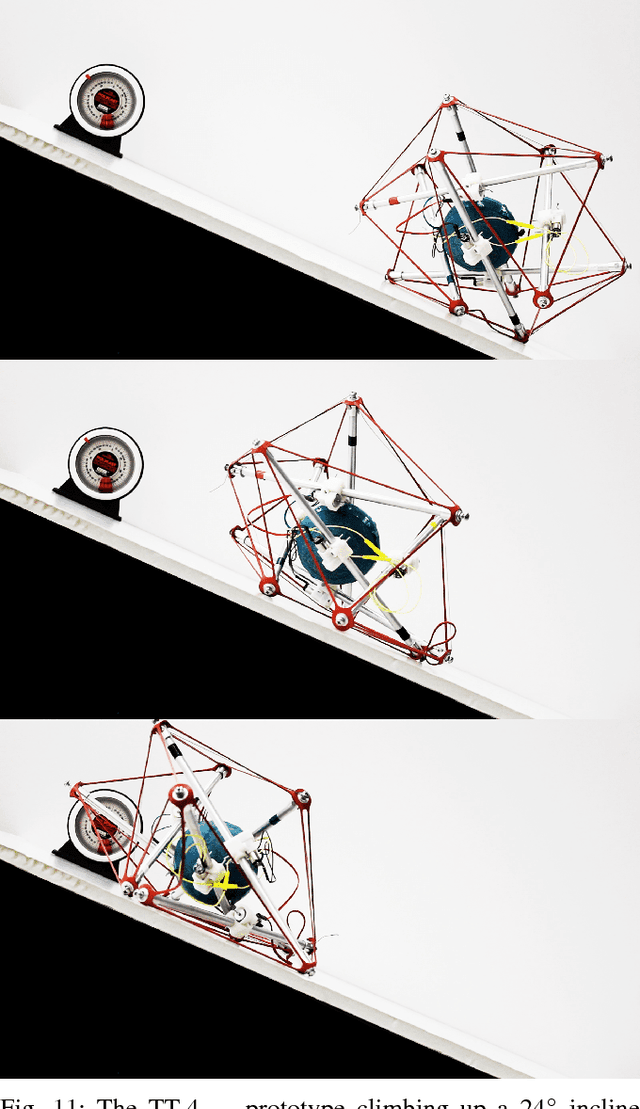
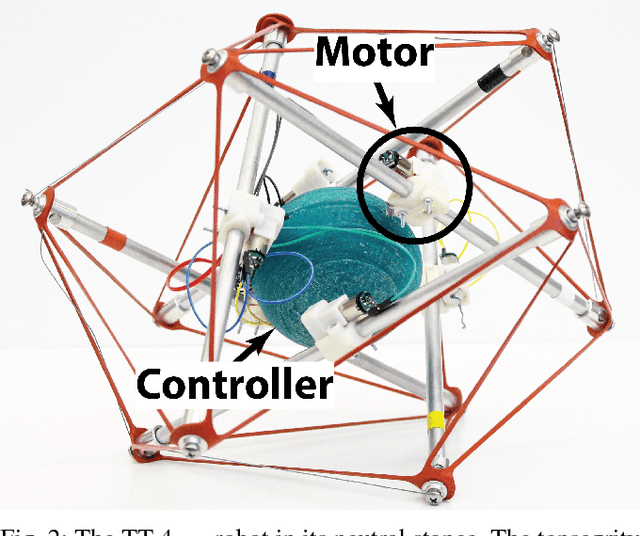
This paper presents a new teleoperated spherical tensegrity robot capable of performing locomotion on steep inclined surfaces. With a novel control scheme centered around the simultaneous actuation of multiple cables, the robot demonstrates robust climbing on inclined surfaces in hardware experiments and speeds significantly faster than previous spherical tensegrity models. This robot is an improvement over other iterations in the TT-series and the first tensegrity to achieve reliable locomotion on inclined surfaces of up to 24\degree. We analyze locomotion in simulation and hardware under single and multi-cable actuation, and introduce two novel multi-cable actuation policies, suited for steep incline climbing and speed, respectively. We propose compelling justifications for the increased dynamic ability of the robot and motivate development of optimization algorithms able to take advantage of the robot's increased control authority.