 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultistep Belief Space Dynamics Learning For Risk-Aware Control
May 12, 2026As autonomous vehicles move from a simplified research setting to practical use, there exists a large gap between the dynamic behavior of a human driving and an autonomous system. Risk-aware behavior needs to naturally develop in order to scale to the demands of the real world. A major issue for risk-aware planning and control has been predicting how dynamical uncertainty evolves through time and optimizing plans that account for this without being overly conservative. Here, we present a learning framework to predict distributional dynamics that can be optimized in real time for Model Predictive Control (MPC). We explore the importance of structure when learning distributional dynamics for use in MPC. A rigorous ablation study is conducted on a large dataset of real world off-road driving that shows the impact of deviations from our proposed structure. Furthermore, we deploy our learned model and planning stack on a full sized vehicle in challenging off-road conditions. Our planning architecture is able to naturally regulate the speed of the vehicle based on the environment and consistently demonstrates intelligent behavior over miles of diverse terrain.
WildOS: Open-Vocabulary Object Search in the Wild
Feb 22, 2026Autonomous navigation in complex, unstructured outdoor environments requires robots to operate over long ranges without prior maps and limited depth sensing. In such settings, relying solely on geometric frontiers for exploration is often insufficient. In such settings, the ability to reason semantically about where to go and what is safe to traverse is crucial for robust, efficient exploration. This work presents WildOS, a unified system for long-range, open-vocabulary object search that combines safe geometric exploration with semantic visual reasoning. WildOS builds a sparse navigation graph to maintain spatial memory, while utilizing a foundation-model-based vision module, ExploRFM, to score frontier nodes of the graph. ExploRFM simultaneously predicts traversability, visual frontiers, and object similarity in image space, enabling real-time, onboard semantic navigation tasks. The resulting vision-scored graph enables the robot to explore semantically meaningful directions while ensuring geometric safety. Furthermore, we introduce a particle-filter-based method for coarse localization of the open-vocabulary target query, that estimates candidate goal positions beyond the robot's immediate depth horizon, enabling effective planning toward distant goals. Extensive closed-loop field experiments across diverse off-road and urban terrains demonstrate that WildOS enables robust navigation, significantly outperforming purely geometric and purely vision-based baselines in both efficiency and autonomy. Our results highlight the potential of vision foundation models to drive open-world robotic behaviors that are both semantically informed and geometrically grounded. Project Page: https://leggedrobotics.github.io/wildos/
Meta-Learning Online Dynamics Model Adaptation in Off-Road Autonomous Driving
Apr 23, 2025
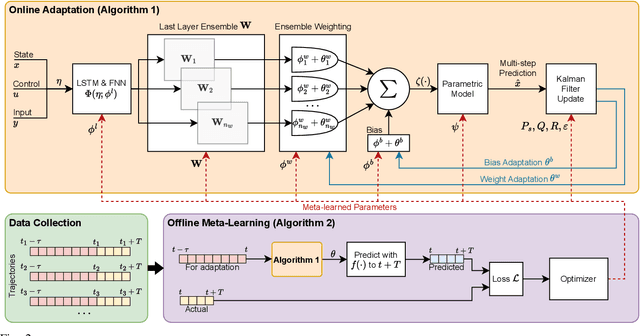
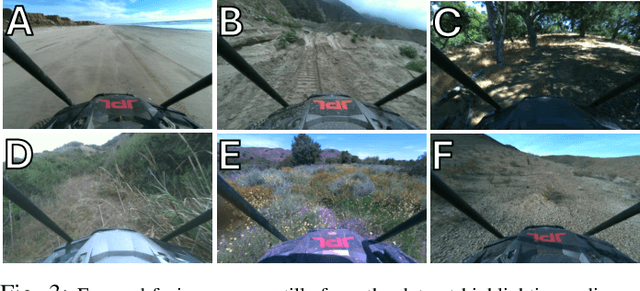
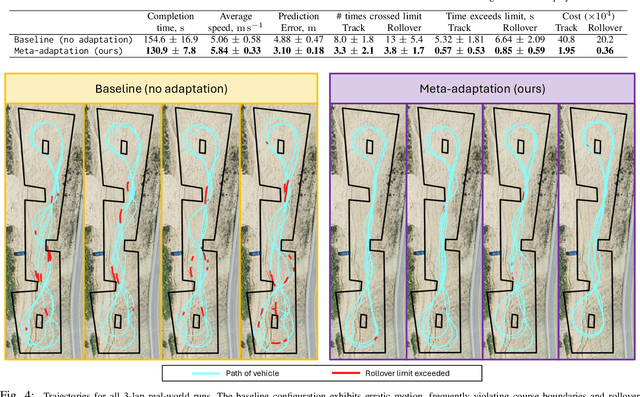
High-speed off-road autonomous driving presents unique challenges due to complex, evolving terrain characteristics and the difficulty of accurately modeling terrain-vehicle interactions. While dynamics models used in model-based control can be learned from real-world data, they often struggle to generalize to unseen terrain, making real-time adaptation essential. We propose a novel framework that combines a Kalman filter-based online adaptation scheme with meta-learned parameters to address these challenges. Offline meta-learning optimizes the basis functions along which adaptation occurs, as well as the adaptation parameters, while online adaptation dynamically adjusts the onboard dynamics model in real time for model-based control. We validate our approach through extensive experiments, including real-world testing on a full-scale autonomous off-road vehicle, demonstrating that our method outperforms baseline approaches in prediction accuracy, performance, and safety metrics, particularly in safety-critical scenarios. Our results underscore the effectiveness of meta-learned dynamics model adaptation, advancing the development of reliable autonomous systems capable of navigating diverse and unseen environments. Video is available at: https://youtu.be/cCKHHrDRQEA
An Addendum to NeBula: Towards Extending TEAM CoSTAR's Solution to Larger Scale Environments
Apr 18, 2025This paper presents an appendix to the original NeBula autonomy solution developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), participating in the DARPA Subterranean Challenge. Specifically, this paper presents extensions to NeBula's hardware, software, and algorithmic components that focus on increasing the range and scale of the exploration environment. From the algorithmic perspective, we discuss the following extensions to the original NeBula framework: (i) large-scale geometric and semantic environment mapping; (ii) an adaptive positioning system; (iii) probabilistic traversability analysis and local planning; (iv) large-scale POMDP-based global motion planning and exploration behavior; (v) large-scale networking and decentralized reasoning; (vi) communication-aware mission planning; and (vii) multi-modal ground-aerial exploration solutions. We demonstrate the application and deployment of the presented systems and solutions in various large-scale underground environments, including limestone mine exploration scenarios as well as deployment in the DARPA Subterranean challenge.
COARSE: Collaborative Pseudo-Labeling with Coarse Real Labels for Off-Road Semantic Segmentation
Mar 05, 2025
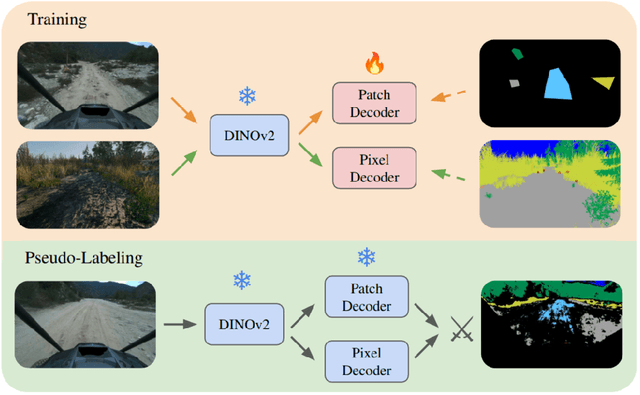


Autonomous off-road navigation faces challenges due to diverse, unstructured environments, requiring robust perception with both geometric and semantic understanding. However, scarce densely labeled semantic data limits generalization across domains. Simulated data helps, but introduces domain adaptation issues. We propose COARSE, a semi-supervised domain adaptation framework for off-road semantic segmentation, leveraging sparse, coarse in-domain labels and densely labeled out-of-domain data. Using pretrained vision transformers, we bridge domain gaps with complementary pixel-level and patch-level decoders, enhanced by a collaborative pseudo-labeling strategy on unlabeled data. Evaluations on RUGD and Rellis-3D datasets show significant improvements of 9.7\% and 8.4\% respectively, versus only using coarse data. Tests on real-world off-road vehicle data in a multi-biome setting further demonstrate COARSE's applicability.
Dynamics Modeling using Visual Terrain Features for High-Speed Autonomous Off-Road Driving
Nov 30, 2024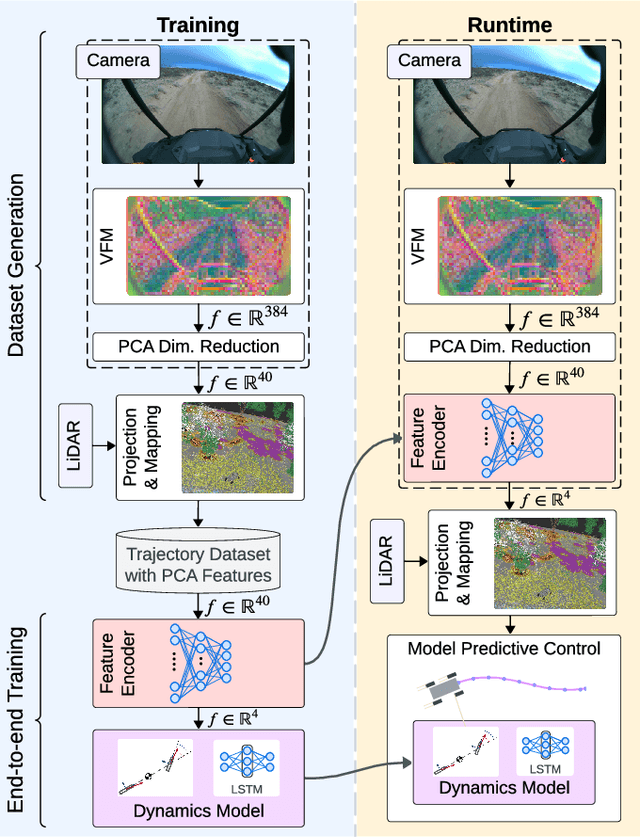

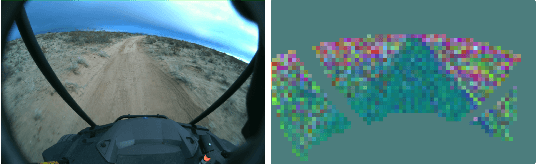
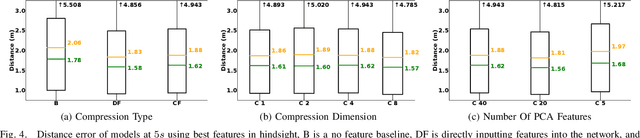
Rapid autonomous traversal of unstructured terrain is essential for scenarios such as disaster response, search and rescue, or planetary exploration. As a vehicle navigates at the limit of its capabilities over extreme terrain, its dynamics can change suddenly and dramatically. For example, high-speed and varying terrain can affect parameters such as traction, tire slip, and rolling resistance. To achieve effective planning in such environments, it is crucial to have a dynamics model that can accurately anticipate these conditions. In this work, we present a hybrid model that predicts the changing dynamics induced by the terrain as a function of visual inputs. We leverage a pre-trained visual foundation model (VFM) DINOv2, which provides rich features that encode fine-grained semantic information. To use this dynamics model for planning, we propose an end-to-end training architecture for a projection distance independent feature encoder that compresses the information from the VFM, enabling the creation of a lightweight map of the environment at runtime. We validate our architecture on an extensive dataset (hundreds of kilometers of aggressive off-road driving) collected across multiple locations as part of the DARPA Robotic Autonomy in Complex Environments with Resiliency (RACER) program. https://www.youtube.com/watch?v=dycTXxEosMk
Few-shot Semantic Learning for Robust Multi-Biome 3D Semantic Mapping in Off-Road Environments
Nov 10, 2024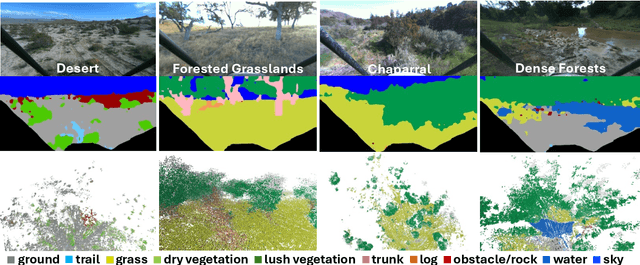
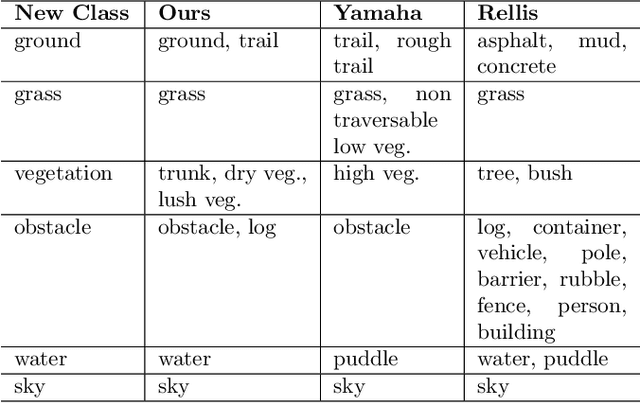

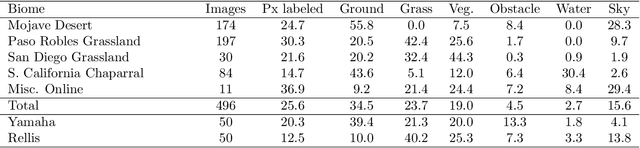
Off-road environments pose significant perception challenges for high-speed autonomous navigation due to unstructured terrain, degraded sensing conditions, and domain-shifts among biomes. Learning semantic information across these conditions and biomes can be challenging when a large amount of ground truth data is required. In this work, we propose an approach that leverages a pre-trained Vision Transformer (ViT) with fine-tuning on a small (<500 images), sparse and coarsely labeled (<30% pixels) multi-biome dataset to predict 2D semantic segmentation classes. These classes are fused over time via a novel range-based metric and aggregated into a 3D semantic voxel map. We demonstrate zero-shot out-of-biome 2D semantic segmentation on the Yamaha (52.9 mIoU) and Rellis (55.5 mIoU) datasets along with few-shot coarse sparse labeling with existing data for improved segmentation performance on Yamaha (66.6 mIoU) and Rellis (67.2 mIoU). We further illustrate the feasibility of using a voxel map with a range-based semantic fusion approach to handle common off-road hazards like pop-up hazards, overhangs, and water features.
RoadRunner M&M -- Learning Multi-range Multi-resolution Traversability Maps for Autonomous Off-road Navigation
Sep 17, 2024Autonomous robot navigation in off-road environments requires a comprehensive understanding of the terrain geometry and traversability. The degraded perceptual conditions and sparse geometric information at longer ranges make the problem challenging especially when driving at high speeds. Furthermore, the sensing-to-mapping latency and the look-ahead map range can limit the maximum speed of the vehicle. Building on top of the recent work RoadRunner, in this work, we address the challenge of long-range (100 m) traversability estimation. Our RoadRunner (M&M) is an end-to-end learning-based framework that directly predicts the traversability and elevation maps at multiple ranges (50 m, 100 m) and resolutions (0.2 m, 0.8 m) taking as input multiple images and a LiDAR voxel map. Our method is trained in a self-supervised manner by leveraging the dense supervision signal generated by fusing predictions from an existing traversability estimation stack (X-Racer) in hindsight and satellite Digital Elevation Maps. RoadRunner M&M achieves a significant improvement of up to 50% for elevation mapping and 30% for traversability estimation over RoadRunner, and is able to predict in 30% more regions compared to X-Racer while achieving real-time performance. Experiments on various out-of-distribution datasets also demonstrate that our data-driven approach starts to generalize to novel unstructured environments. We integrate our proposed framework in closed-loop with the path planner to demonstrate autonomous high-speed off-road robotic navigation in challenging real-world environments. Project Page: https://leggedrobotics.github.io/roadrunner_mm/
Robust High-Speed State Estimation for Off-road Navigation using Radar Velocity Factors
Sep 17, 2024Enabling robot autonomy in complex environments for mission critical application requires robust state estimation. Particularly under conditions where the exteroceptive sensors, which the navigation depends on, can be degraded by environmental challenges thus, leading to mission failure. It is precisely in such challenges where the potential for FMCW radar sensors is highlighted: as a complementary exteroceptive sensing modality with direct velocity measuring capabilities. In this work we integrate radial speed measurements from a FMCW radar sensor, using a radial speed factor, to provide linear velocity updates into a sliding-window state estimator for fusion with LiDAR pose and IMU measurements. We demonstrate that this augmentation increases the robustness of the state estimator to challenging conditions present in the environment and the negative effects they can pose to vulnerable exteroceptive modalities. The proposed method is extensively evaluated using robotic field experiments conducted using an autonomous, full-scale, off-road vehicle operating at high-speeds (~12 m/s) in complex desert environments. Furthermore, the robustness of the approach is demonstrated for cases of both simulated and real-world degradation of the LiDAR odometry performance along with comparison against state-of-the-art methods for radar-inertial odometry on public datasets.
Low Frequency Sampling in Model Predictive Path Integral Control
Apr 03, 2024

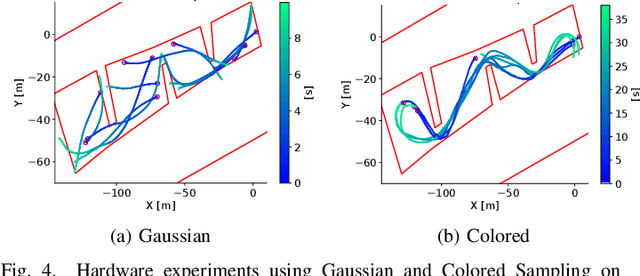
Sampling-based model-predictive controllers have become a powerful optimization tool for planning and control problems in various challenging environments. In this paper, we show how the default choice of uncorrelated Gaussian distributions can be improved upon with the use of a colored noise distribution. Our choice of distribution allows for the emphasis on low frequency control signals, which can result in smoother and more exploratory samples. We use this frequency-based sampling distribution with Model Predictive Path Integral (MPPI) in both hardware and simulation experiments to show better or equal performance on systems with various speeds of input response.