 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeFM: Learning Foundation Representations from Depth for Robotics
Jan 26, 2026Depth sensors are widely deployed across robotic platforms, and advances in fast, high-fidelity depth simulation have enabled robotic policies trained on depth observations to achieve robust sim-to-real transfer for a wide range of tasks. Despite this, representation learning for depth modality remains underexplored compared to RGB, where large-scale foundation models now define the state of the art. To address this gap, we present DeFM, a self-supervised foundation model trained entirely on depth images for robotic applications. Using a DINO-style self-distillation objective on a curated dataset of 60M depth images, DeFM learns geometric and semantic representations that generalize to diverse environments, tasks, and sensors. To retain metric awareness across multiple scales, we introduce a novel input normalization strategy. We further distill DeFM into compact models suitable for resource-constrained robotic systems. When evaluated on depth-based classification, segmentation, navigation, locomotion, and manipulation benchmarks, DeFM achieves state-of-the-art performance and demonstrates strong generalization from simulation to real-world environments. We release all our pretrained models, which can be adopted off-the-shelf for depth-based robotic learning without task-specific fine-tuning. Webpage: https://de-fm.github.io/
Large-Scale Autonomous Gas Monitoring for Volcanic Environments: A Legged Robot on Mount Etna
Jan 12, 2026Volcanic gas emissions are key precursors of eruptive activity. Yet, obtaining accurate near-surface measurements remains hazardous and logistically challenging, motivating the need for autonomous solutions. Limited mobility in rough volcanic terrain has prevented wheeled systems from performing reliable in situ gas measurements, reducing their usefulness as sensing platforms. We present a legged robotic system for autonomous volcanic gas analysis, utilizing the quadruped ANYmal, equipped with a quadrupole mass spectrometer system. Our modular autonomy stack integrates a mission planning interface, global planner, localization framework, and terrain-aware local navigation. We evaluated the system on Mount Etna across three autonomous missions in varied terrain, achieving successful gas-source detections with autonomy rates of 93-100%. In addition, we conducted a teleoperated mission in which the robot measured natural fumaroles, detecting sulfur dioxide and carbon dioxide. We discuss lessons learned from the gas-analysis and autonomy perspectives, emphasizing the need for adaptive sensing strategies, tighter integration of global and local planning, and improved hardware design.
VLD: Visual Language Goal Distance for Reinforcement Learning Navigation
Dec 08, 2025Training end-to-end policies from image data to directly predict navigation actions for robotic systems has proven inherently difficult. Existing approaches often suffer from either the sim-to-real gap during policy transfer or a limited amount of training data with action labels. To address this problem, we introduce Vision-Language Distance (VLD) learning, a scalable framework for goal-conditioned navigation that decouples perception learning from policy learning. Instead of relying on raw sensory inputs during policy training, we first train a self-supervised distance-to-goal predictor on internet-scale video data. This predictor generalizes across both image- and text-based goals, providing a distance signal that can be minimized by a reinforcement learning (RL) policy. The RL policy can be trained entirely in simulation using privileged geometric distance signals, with injected noise to mimic the uncertainty of the trained distance predictor. At deployment, the policy consumes VLD predictions, inheriting semantic goal information-"where to go"-from large-scale visual training while retaining the robust low-level navigation behaviors learned in simulation. We propose using ordinal consistency to assess distance functions directly and demonstrate that VLD outperforms prior temporal distance approaches, such as ViNT and VIP. Experiments show that our decoupled design achieves competitive navigation performance in simulation while supporting flexible goal modalities, providing an alternative and, most importantly, scalable path toward reliable, multimodal navigation policies.
NaviTrace: Evaluating Embodied Navigation of Vision-Language Models
Oct 30, 2025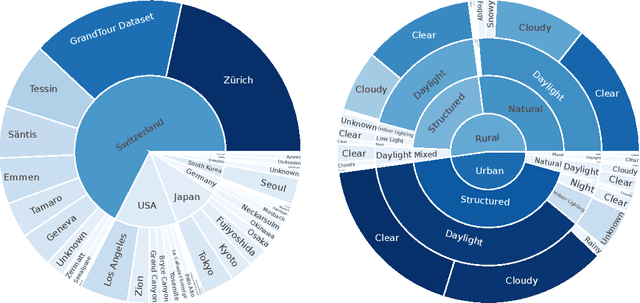
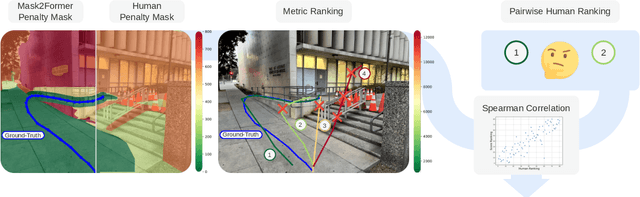
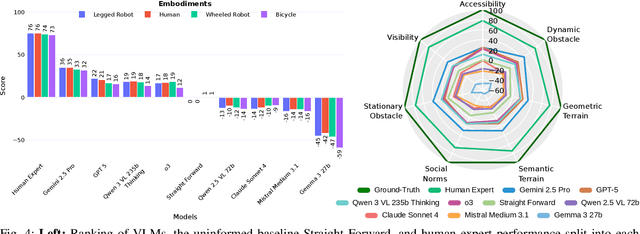
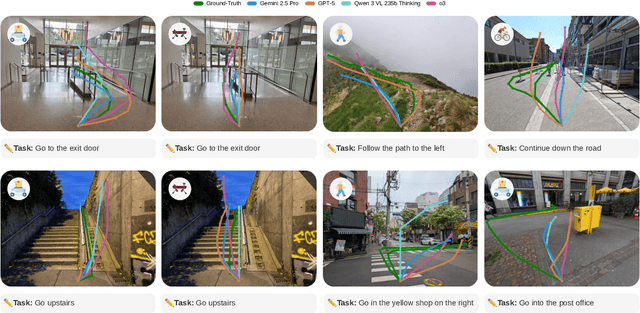
Vision-language models demonstrate unprecedented performance and generalization across a wide range of tasks and scenarios. Integrating these foundation models into robotic navigation systems opens pathways toward building general-purpose robots. Yet, evaluating these models' navigation capabilities remains constrained by costly real-world trials, overly simplified simulations, and limited benchmarks. We introduce NaviTrace, a high-quality Visual Question Answering benchmark where a model receives an instruction and embodiment type (human, legged robot, wheeled robot, bicycle) and must output a 2D navigation trace in image space. Across 1000 scenarios and more than 3000 expert traces, we systematically evaluate eight state-of-the-art VLMs using a newly introduced semantic-aware trace score. This metric combines Dynamic Time Warping distance, goal endpoint error, and embodiment-conditioned penalties derived from per-pixel semantics and correlates with human preferences. Our evaluation reveals consistent gap to human performance caused by poor spatial grounding and goal localization. NaviTrace establishes a scalable and reproducible benchmark for real-world robotic navigation. The benchmark and leaderboard can be found at https://leggedrobotics.github.io/navitrace_webpage/.
TartanGround: A Large-Scale Dataset for Ground Robot Perception and Navigation
May 15, 2025We present TartanGround, a large-scale, multi-modal dataset to advance the perception and autonomy of ground robots operating in diverse environments. This dataset, collected in various photorealistic simulation environments includes multiple RGB stereo cameras for 360-degree coverage, along with depth, optical flow, stereo disparity, LiDAR point clouds, ground truth poses, semantic segmented images, and occupancy maps with semantic labels. Data is collected using an integrated automatic pipeline, which generates trajectories mimicking the motion patterns of various ground robot platforms, including wheeled and legged robots. We collect 910 trajectories across 70 environments, resulting in 1.5 million samples. Evaluations on occupancy prediction and SLAM tasks reveal that state-of-the-art methods trained on existing datasets struggle to generalize across diverse scenes. TartanGround can serve as a testbed for training and evaluation of a broad range of learning-based tasks, including occupancy prediction, SLAM, neural scene representation, perception-based navigation, and more, enabling advancements in robotic perception and autonomy towards achieving robust models generalizable to more diverse scenarios. The dataset and codebase for data collection will be made publicly available upon acceptance. Webpage: https://tartanair.org/tartanground
RoadRunner M&M -- Learning Multi-range Multi-resolution Traversability Maps for Autonomous Off-road Navigation
Sep 17, 2024Autonomous robot navigation in off-road environments requires a comprehensive understanding of the terrain geometry and traversability. The degraded perceptual conditions and sparse geometric information at longer ranges make the problem challenging especially when driving at high speeds. Furthermore, the sensing-to-mapping latency and the look-ahead map range can limit the maximum speed of the vehicle. Building on top of the recent work RoadRunner, in this work, we address the challenge of long-range (100 m) traversability estimation. Our RoadRunner (M&M) is an end-to-end learning-based framework that directly predicts the traversability and elevation maps at multiple ranges (50 m, 100 m) and resolutions (0.2 m, 0.8 m) taking as input multiple images and a LiDAR voxel map. Our method is trained in a self-supervised manner by leveraging the dense supervision signal generated by fusing predictions from an existing traversability estimation stack (X-Racer) in hindsight and satellite Digital Elevation Maps. RoadRunner M&M achieves a significant improvement of up to 50% for elevation mapping and 30% for traversability estimation over RoadRunner, and is able to predict in 30% more regions compared to X-Racer while achieving real-time performance. Experiments on various out-of-distribution datasets also demonstrate that our data-driven approach starts to generalize to novel unstructured environments. We integrate our proposed framework in closed-loop with the path planner to demonstrate autonomous high-speed off-road robotic navigation in challenging real-world environments. Project Page: https://leggedrobotics.github.io/roadrunner_mm/
GlORIE-SLAM: Globally Optimized RGB-only Implicit Encoding Point Cloud SLAM
Mar 30, 2024



Recent advancements in RGB-only dense Simultaneous Localization and Mapping (SLAM) have predominantly utilized grid-based neural implicit encodings and/or struggle to efficiently realize global map and pose consistency. To this end, we propose an efficient RGB-only dense SLAM system using a flexible neural point cloud scene representation that adapts to keyframe poses and depth updates, without needing costly backpropagation. Another critical challenge of RGB-only SLAM is the lack of geometric priors. To alleviate this issue, with the aid of a monocular depth estimator, we introduce a novel DSPO layer for bundle adjustment which optimizes the pose and depth of keyframes along with the scale of the monocular depth. Finally, our system benefits from loop closure and online global bundle adjustment and performs either better or competitive to existing dense neural RGB SLAM methods in tracking, mapping and rendering accuracy on the Replica, TUM-RGBD and ScanNet datasets. The source code will be made available.
RoadRunner - Learning Traversability Estimation for Autonomous Off-road Driving
Mar 03, 2024



Autonomous navigation at high speeds in off-road environments necessitates robots to comprehensively understand their surroundings using onboard sensing only. The extreme conditions posed by the off-road setting can cause degraded camera image quality due to poor lighting and motion blur, as well as limited sparse geometric information available from LiDAR sensing when driving at high speeds. In this work, we present RoadRunner, a novel framework capable of predicting terrain traversability and an elevation map directly from camera and LiDAR sensor inputs. RoadRunner enables reliable autonomous navigation, by fusing sensory information, handling of uncertainty, and generation of contextually informed predictions about the geometry and traversability of the terrain while operating at low latency. In contrast to existing methods relying on classifying handcrafted semantic classes and using heuristics to predict traversability costs, our method is trained end-to-end in a self-supervised fashion. The RoadRunner network architecture builds upon popular sensor fusion network architectures from the autonomous driving domain, which embed LiDAR and camera information into a common Bird's Eye View perspective. Training is enabled by utilizing an existing traversability estimation stack to generate training data in hindsight in a scalable manner from real-world off-road driving datasets. Furthermore, RoadRunner improves the system latency by a factor of roughly 4, from 500 ms to 140 ms, while improving the accuracy for traversability costs and elevation map predictions. We demonstrate the effectiveness of RoadRunner in enabling safe and reliable off-road navigation at high speeds in multiple real-world driving scenarios through unstructured desert environments.
COVINS-G: A Generic Back-end for Collaborative Visual-Inertial SLAM
Jan 17, 2023



Collaborative SLAM is at the core of perception in multi-robot systems as it enables the co-localization of the team of robots in a common reference frame, which is of vital importance for any coordination amongst them. The paradigm of a centralized architecture is well established, with the robots (i.e. agents) running Visual-Inertial Odometry (VIO) onboard while communicating relevant data, such as e.g. Keyframes (KFs), to a central back-end (i.e. server), which then merges and optimizes the joint maps of the agents. While these frameworks have proven to be successful, their capability and performance are highly dependent on the choice of the VIO front-end, thus limiting their flexibility. In this work, we present COVINS-G, a generalized back-end building upon the COVINS framework, enabling the compatibility of the server-back-end with any arbitrary VIO front-end, including, for example, off-the-shelf cameras with odometry capabilities, such as the Realsense T265. The COVINS-G back-end deploys a multi-camera relative pose estimation algorithm for computing the loop-closure constraints allowing the system to work purely on 2D image data. In the experimental evaluation, we show on-par accuracy with state-of-the-art multi-session and collaborative SLAM systems, while demonstrating the flexibility and generality of our approach by employing different front-ends onboard collaborating agents within the same mission. The COVINS-G codebase along with a generalized front-end wrapper to allow any existing VIO front-end to be readily used in combination with the proposed collaborative back-end is open-sourced. Video: https://youtu.be/FoJfXCfaYDw
LiDAR-guided object search and detection in Subterranean Environments
Oct 26, 2022


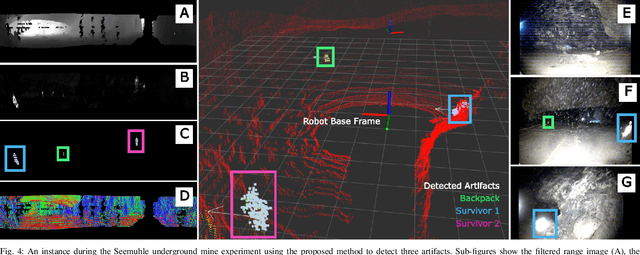
Detecting objects of interest, such as human survivors, safety equipment, and structure access points, is critical to any search-and-rescue operation. Robots deployed for such time-sensitive efforts rely on their onboard sensors to perform their designated tasks. However, as disaster response operations are predominantly conducted under perceptually degraded conditions, commonly utilized sensors such as visual cameras and LiDARs suffer in terms of performance degradation. In response, this work presents a method that utilizes the complementary nature of vision and depth sensors to leverage multi-modal information to aid object detection at longer distances. In particular, depth and intensity values from sparse LiDAR returns are used to generate proposals for objects present in the environment. These proposals are then utilized by a Pan-Tilt-Zoom (PTZ) camera system to perform a directed search by adjusting its pose and zoom level for performing object detection and classification in difficult environments. The proposed work has been thoroughly verified using an ANYmal quadruped robot in underground settings and on datasets collected during the DARPA Subterranean Challenge finals.