 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Smooth Sea Never Made a Skilled $\texttt{SAILOR}$: Robust Imitation via Learning to Search
Jun 05, 2025



The fundamental limitation of the behavioral cloning (BC) approach to imitation learning is that it only teaches an agent what the expert did at states the expert visited. This means that when a BC agent makes a mistake which takes them out of the support of the demonstrations, they often don't know how to recover from it. In this sense, BC is akin to giving the agent the fish -- giving them dense supervision across a narrow set of states -- rather than teaching them to fish: to be able to reason independently about achieving the expert's outcome even when faced with unseen situations at test-time. In response, we explore learning to search (L2S) from expert demonstrations, i.e. learning the components required to, at test time, plan to match expert outcomes, even after making a mistake. These include (1) a world model and (2) a reward model. We carefully ablate the set of algorithmic and design decisions required to combine these and other components for stable and sample/interaction-efficient learning of recovery behavior without additional human corrections. Across a dozen visual manipulation tasks from three benchmarks, our approach $\texttt{SAILOR}$ consistently out-performs state-of-the-art Diffusion Policies trained via BC on the same data. Furthermore, scaling up the amount of demonstrations used for BC by 5-10$\times$ still leaves a performance gap. We find that $\texttt{SAILOR}$ can identify nuanced failures and is robust to reward hacking. Our code is available at https://github.com/arnavkj1995/SAILOR .
Design of an All-Purpose Terrace Farming Robot
Dec 04, 2022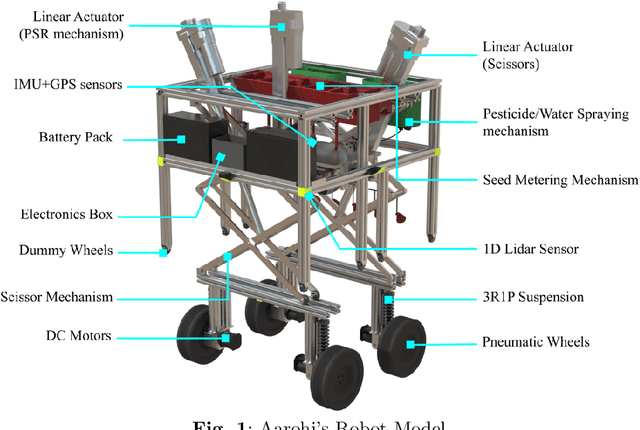
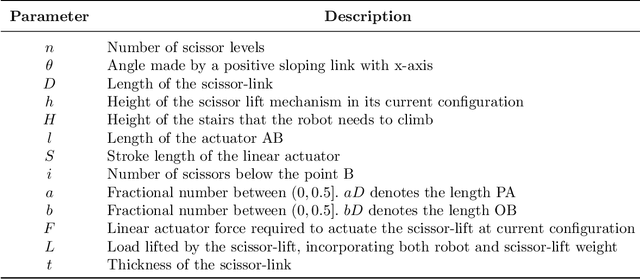
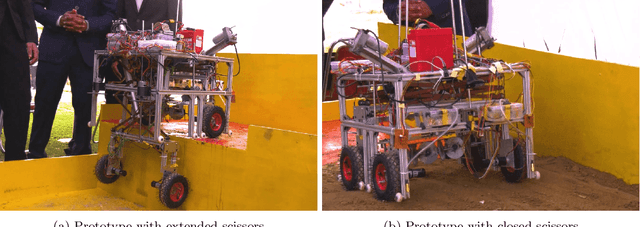
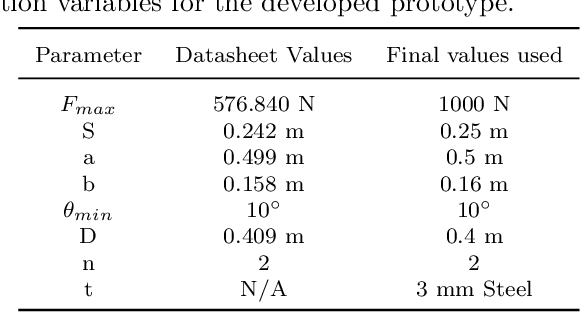
Automation in farming processes is a growing field of research in both academia and industries. A considerable amount of work has been put into this field to develop systems robust enough for farming. Terrace farming, in particular, provides a varying set of challenges, including robust stair climbing methods and stable navigation in unstructured terrains. We propose the design of a novel autonomous terrace farming robot, Aarohi, that can effectively climb steep terraces of considerable heights and execute several farming operations. The design optimisation strategy for the overall mechanical structure is elucidated. Further, the embedded and software architecture along with fail-safe strategies are presented for a working prototype. Algorithms for autonomous traversal over the terrace steps using the scissor lift mechanism and performing various farming operations have also been discussed. The adaptability of the design to specific operational requirements and modular farm tools allow Aarohi to be customised for a wide variety of use cases.
Design and Implementation of Path Trackers for Ackermann Drive based Vehicles
Dec 05, 2020
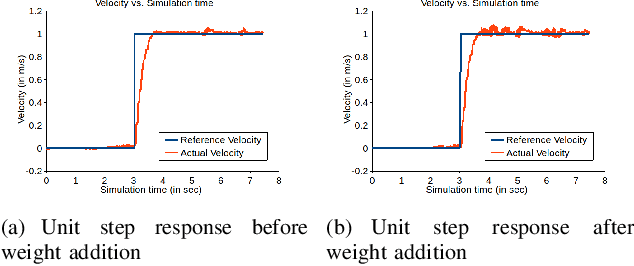
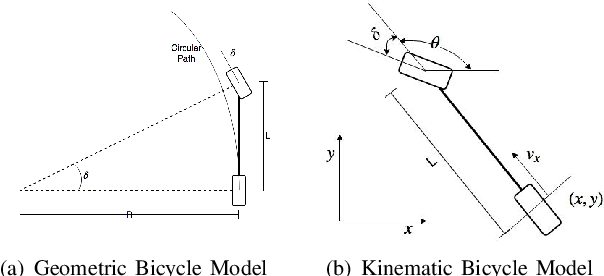
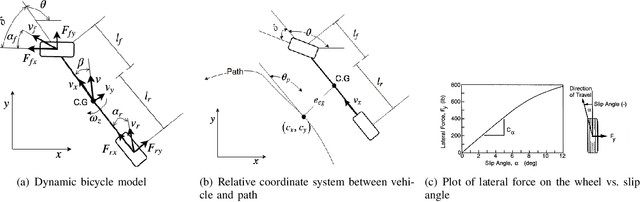
This article is an overview of the various literature on path tracking methods and their implementation in simulation and realistic operating environments.The scope of this study includes analysis, implementation,tuning, and comparison of some selected path tracking methods commonly used in practice for trajectory tracking in autonomous vehicles. Many of these methods are applicable at low speed due to the linear assumption for the system model, and hence, some methods are also included that consider nonlinearities present in lateral vehicle dynamics during high-speed navigation. The performance evaluation and comparison of tracking methods are carried out on realistic simulations and a dedicated instrumented passenger car, Mahindra e2o, to get a performance idea of all the methods in realistic operating conditions and develop tuning methodologies for each of the methods. It has been observed that our model predictive control-based approach is able to perform better compared to the others in medium velocity ranges.