 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of an All-Purpose Terrace Farming Robot
Dec 04, 2022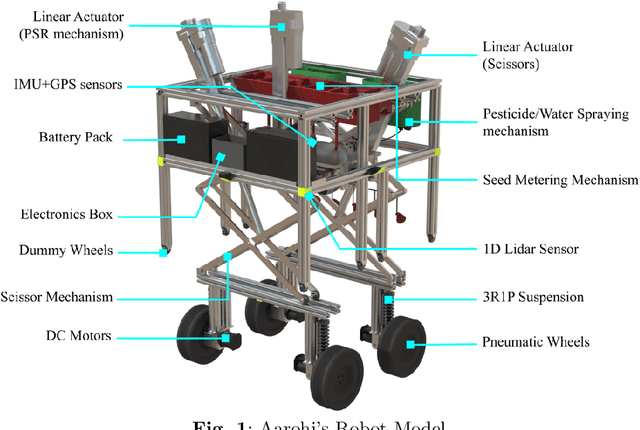
Automation in farming processes is a growing field of research in both academia and industries. A considerable amount of work has been put into this field to develop systems robust enough for farming. Terrace farming, in particular, provides a varying set of challenges, including robust stair climbing methods and stable navigation in unstructured terrains. We propose the design of a novel autonomous terrace farming robot, Aarohi, that can effectively climb steep terraces of considerable heights and execute several farming operations. The design optimisation strategy for the overall mechanical structure is elucidated. Further, the embedded and software architecture along with fail-safe strategies are presented for a working prototype. Algorithms for autonomous traversal over the terrace steps using the scissor lift mechanism and performing various farming operations have also been discussed. The adaptability of the design to specific operational requirements and modular farm tools allow Aarohi to be customised for a wide variety of use cases.
Optimization Based Collision Avoidance for Multi-Agent DynamicalSystems in Goal Reaching Task
Aug 03, 2021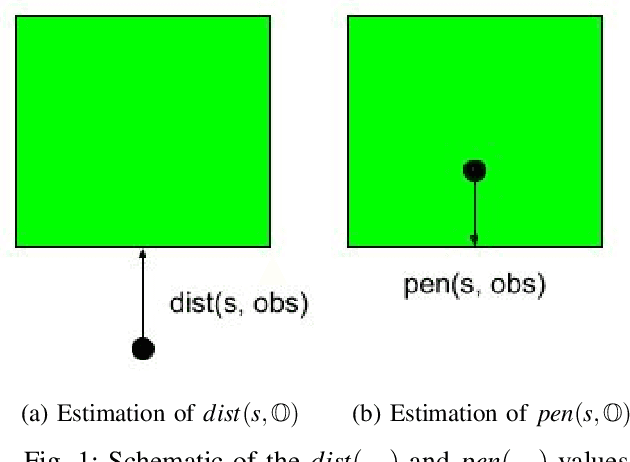
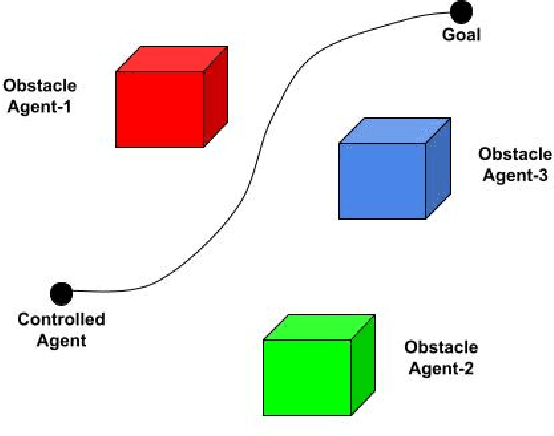
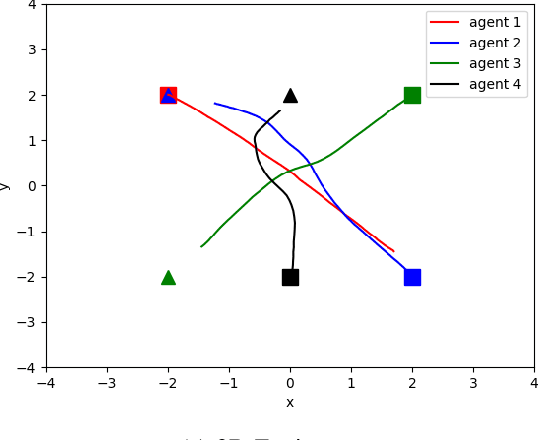
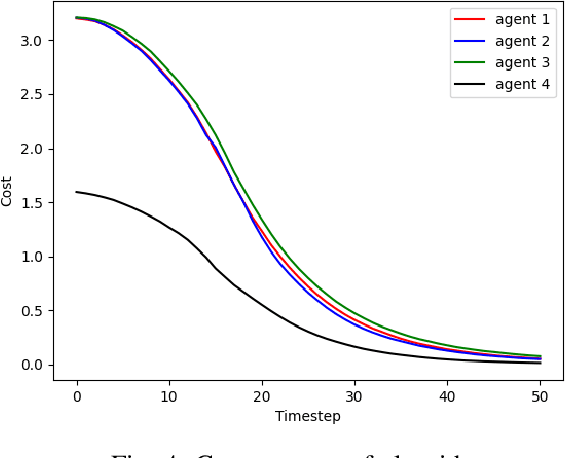
This work presents a distributed MPC-based approach to solving the problem of multi-agent point-to-point transition with optimization-based collision avoidance. The problem is formulated, motivated by the work on collision avoidance for multi-agent systems and dynamic obstacles. With modifications to the formulation, the problem is converted into a distributed problem with a separable objective and coupled constraints. The problem is divided into local sub-problems and solved using Alternating Directions Method of Multipliers(ADMM) applied on an augmented local lagrangian objective.This work aims to understand the multi-agent point-to-point transition problem as an extension of optimization-based collision avoidance and analyze the aspects of computational times, reliability, and optimality of the solution obtained.
Design and Implementation of Path Trackers for Ackermann Drive based Vehicles
Dec 05, 2020
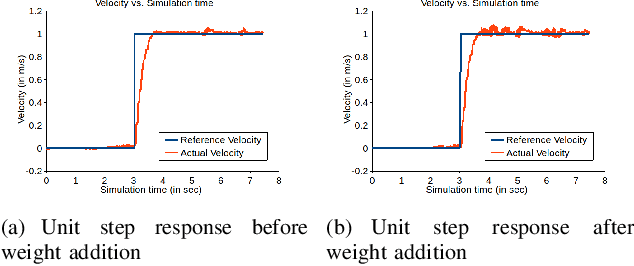
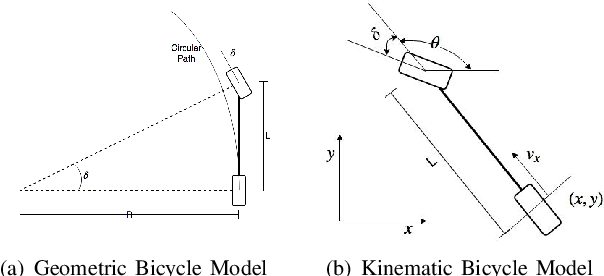
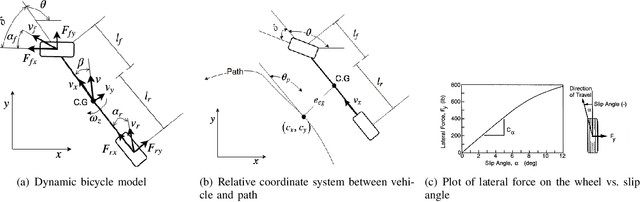
This article is an overview of the various literature on path tracking methods and their implementation in simulation and realistic operating environments.The scope of this study includes analysis, implementation,tuning, and comparison of some selected path tracking methods commonly used in practice for trajectory tracking in autonomous vehicles. Many of these methods are applicable at low speed due to the linear assumption for the system model, and hence, some methods are also included that consider nonlinearities present in lateral vehicle dynamics during high-speed navigation. The performance evaluation and comparison of tracking methods are carried out on realistic simulations and a dedicated instrumented passenger car, Mahindra e2o, to get a performance idea of all the methods in realistic operating conditions and develop tuning methodologies for each of the methods. It has been observed that our model predictive control-based approach is able to perform better compared to the others in medium velocity ranges.