 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of an All-Purpose Terrace Farming Robot
Dec 04, 2022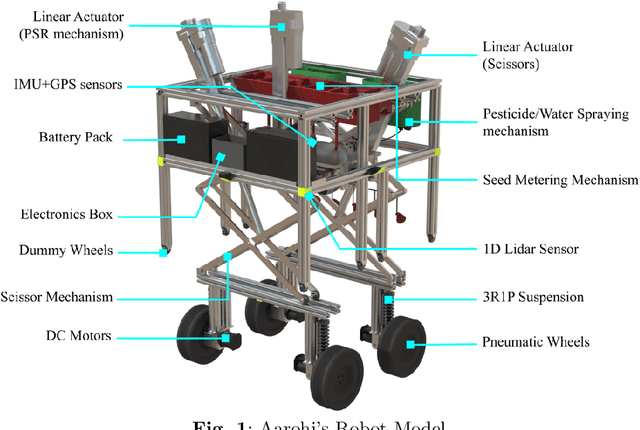
Automation in farming processes is a growing field of research in both academia and industries. A considerable amount of work has been put into this field to develop systems robust enough for farming. Terrace farming, in particular, provides a varying set of challenges, including robust stair climbing methods and stable navigation in unstructured terrains. We propose the design of a novel autonomous terrace farming robot, Aarohi, that can effectively climb steep terraces of considerable heights and execute several farming operations. The design optimisation strategy for the overall mechanical structure is elucidated. Further, the embedded and software architecture along with fail-safe strategies are presented for a working prototype. Algorithms for autonomous traversal over the terrace steps using the scissor lift mechanism and performing various farming operations have also been discussed. The adaptability of the design to specific operational requirements and modular farm tools allow Aarohi to be customised for a wide variety of use cases.
Legal Case Document Summarization: Extractive and Abstractive Methods and their Evaluation
Oct 14, 2022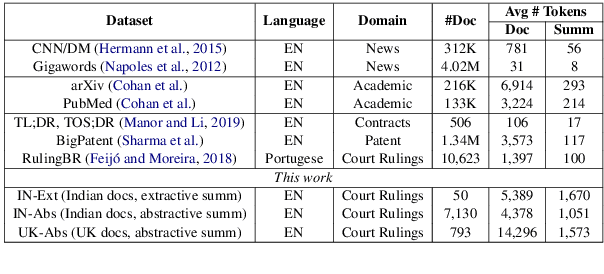
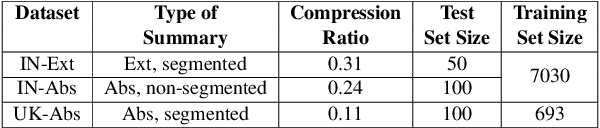
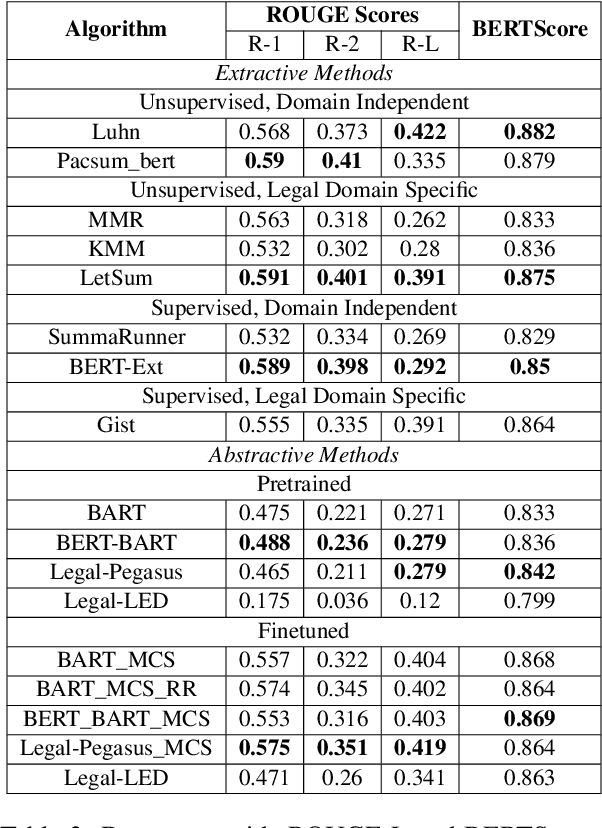
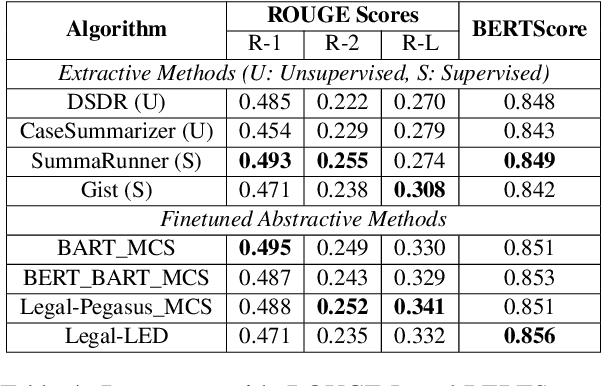
Summarization of legal case judgement documents is a challenging problem in Legal NLP. However, not much analyses exist on how different families of summarization models (e.g., extractive vs. abstractive) perform when applied to legal case documents. This question is particularly important since many recent transformer-based abstractive summarization models have restrictions on the number of input tokens, and legal documents are known to be very long. Also, it is an open question on how best to evaluate legal case document summarization systems. In this paper, we carry out extensive experiments with several extractive and abstractive summarization methods (both supervised and unsupervised) over three legal summarization datasets that we have developed. Our analyses, that includes evaluation by law practitioners, lead to several interesting insights on legal summarization in specific and long document summarization in general.
Sample-Rank: Weak Multi-Objective Recommendations Using Rejection Sampling
Aug 24, 2020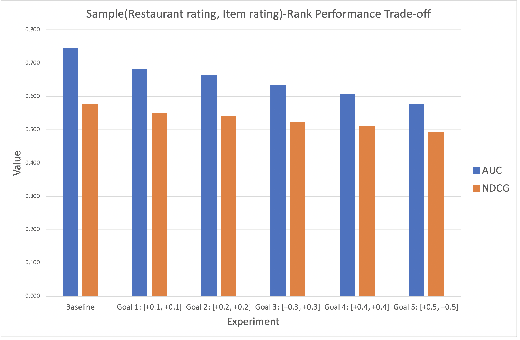
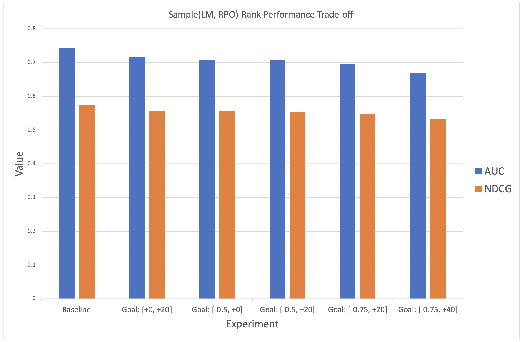
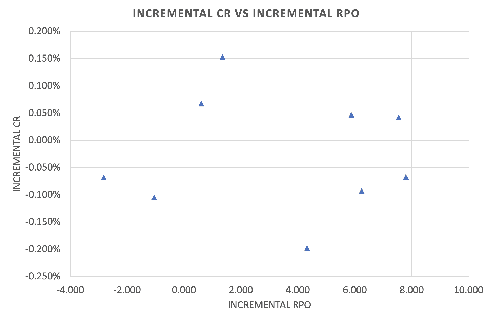
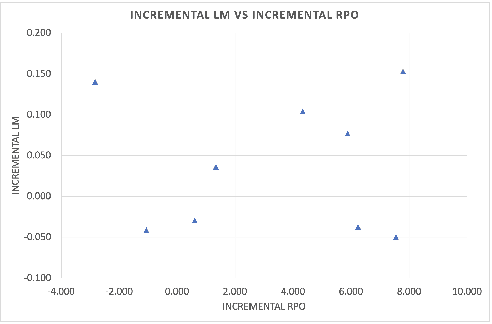
Online food ordering marketplaces are multi-stakeholder systems where recommendations impact the experience and growth of each participant in the system. A recommender system in this setting has to encapsulate the objectives and constraints of different stakeholders in order to find utility of an item for recommendation. Constrained-optimization based approaches to this problem typically involve complex formulations and have high computational complexity in production settings involving millions of entities. Simplifications and relaxation techniques (for example, scalarization) help but introduce sub-optimality and can be time-consuming due to the amount of tuning needed. In this paper, we introduce a method involving multi-goal sampling followed by ranking for user-relevance (Sample-Rank), to nudge recommendations towards multi-objective (MO) goals of the marketplace. The proposed method's novelty is that it reduces the MO recommendation problem to sampling from a desired multi-goal distribution then using it to build a production-friendly learning-to-rank (LTR) model. In offline experiments we show that we are able to bias recommendations towards MO criteria with acceptable trade-offs in metrics like AUC and NDCG. We also show results from a large-scale online A/B experiment where this approach gave a statistically significant lift of 2.64% in average revenue per order (RPO) (objective #1) with no drop in conversion rate (CR) (objective #2) while holding the average last-mile traversed flat (objective #3), vs. the baseline ranking method. This method also significantly reduces time to model development and deployment in MO settings and allows for trivial extensions to more objectives and other types of LTR models.