 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImage Stabilization for Hololens Camera in Remote Collaboration
Apr 05, 2023With the advent of new technologies, Augmented Reality (AR) has become an effective tool in remote collaboration. Narrow field-of-view (FoV) and motion blur can offer an unpleasant experience with limited cognition for remote viewers of AR headsets. In this article, we propose a two-stage pipeline to tackle this issue and ensure a stable viewing experience with a larger FoV. The solution involves an offline 3D reconstruction of the indoor environment, followed by enhanced rendering using only the live poses of AR device. We experiment with and evaluate the two different 3D reconstruction methods, RGB-D geometric approach and Neural Radiance Fields (NeRF), based on their data requirements, reconstruction quality, rendering, and training times. The generated sequences from these methods had smoother transitions and provided a better perspective of the environment. The geometry-based enhanced FoV method had better renderings as it lacked blurry outputs making it better than the other attempted approaches. Structural Similarity Index (SSIM) and Peak Signal to Noise Ratio (PSNR) metrics were used to quantitatively show that the rendering quality using the geometry-based enhanced FoV method is better. Link to the code repository - https://github.com/MixedRealityETHZ/ImageStabilization.
Design of an All-Purpose Terrace Farming Robot
Dec 04, 2022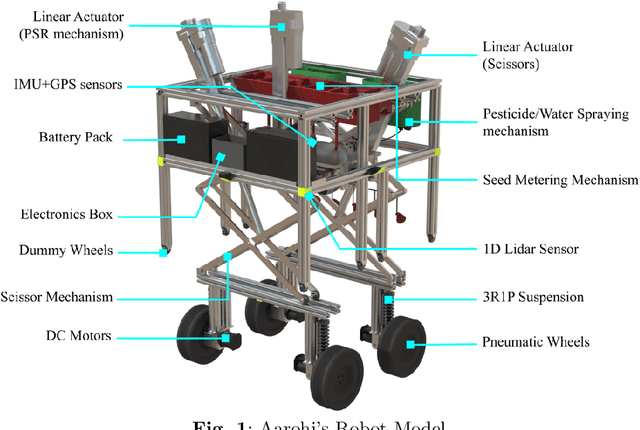
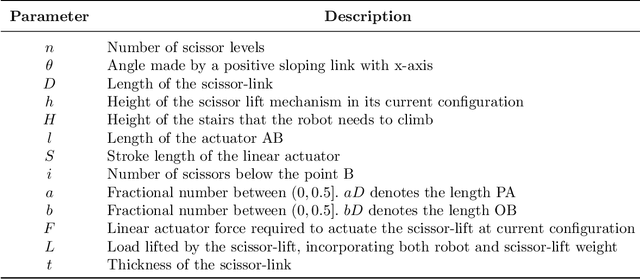
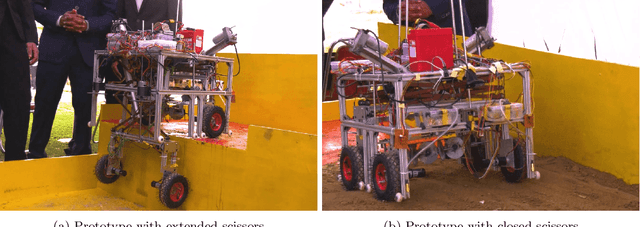
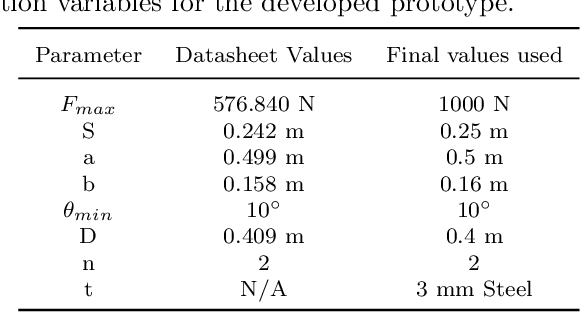
Automation in farming processes is a growing field of research in both academia and industries. A considerable amount of work has been put into this field to develop systems robust enough for farming. Terrace farming, in particular, provides a varying set of challenges, including robust stair climbing methods and stable navigation in unstructured terrains. We propose the design of a novel autonomous terrace farming robot, Aarohi, that can effectively climb steep terraces of considerable heights and execute several farming operations. The design optimisation strategy for the overall mechanical structure is elucidated. Further, the embedded and software architecture along with fail-safe strategies are presented for a working prototype. Algorithms for autonomous traversal over the terrace steps using the scissor lift mechanism and performing various farming operations have also been discussed. The adaptability of the design to specific operational requirements and modular farm tools allow Aarohi to be customised for a wide variety of use cases.