 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIncremental Learning for Animal Pose Estimation using RBF k-DPP
Oct 26, 2021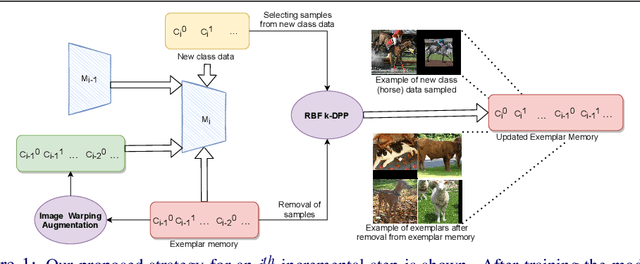
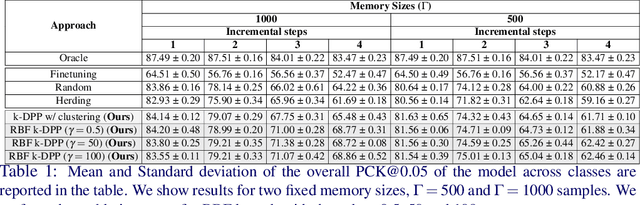
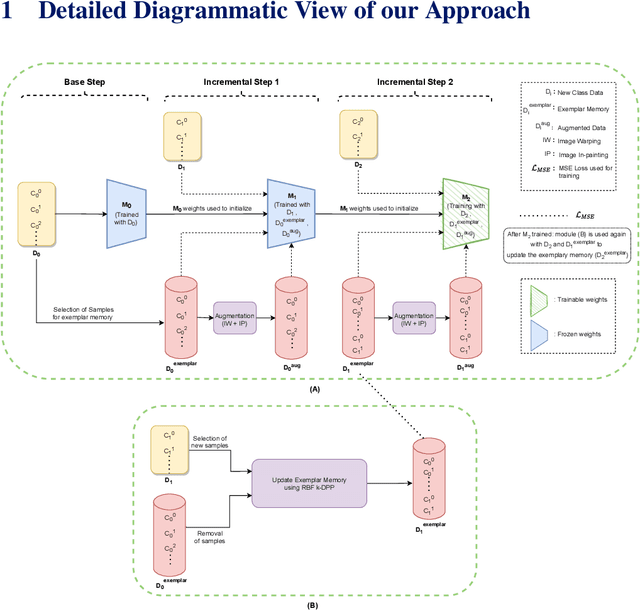
Pose estimation is the task of locating keypoints for an object of interest in an image. Animal Pose estimation is more challenging than estimating human pose due to high inter and intra class variability in animals. Existing works solve this problem for a fixed set of predefined animal categories. Models trained on such sets usually do not work well with new animal categories. Retraining the model on new categories makes the model overfit and leads to catastrophic forgetting. Thus, in this work, we propose a novel problem of "Incremental Learning for Animal Pose Estimation". Our method uses an exemplar memory, sampled using Determinantal Point Processes (DPP) to continually adapt to new animal categories without forgetting the old ones. We further propose a new variant of k-DPP that uses RBF kernel (termed as "RBF k-DPP") which gives more gain in performance over traditional k-DPP. Due to memory constraints, the limited number of exemplars along with new class data can lead to class imbalance. We mitigate it by performing image warping as an augmentation technique. This helps in crafting diverse poses, which reduces overfitting and yields further improvement in performance. The efficacy of our proposed approach is demonstrated via extensive experiments and ablations where we obtain significant improvements over state-of-the-art baseline methods.
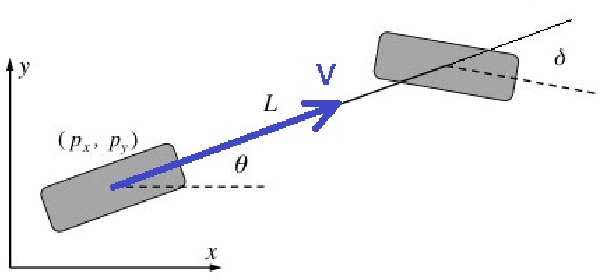
Design and Implementation of Path Trackers for Ackermann Drive based Vehicles
Dec 05, 2020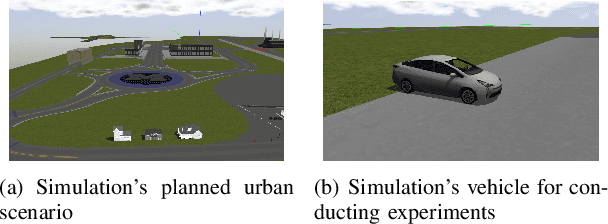
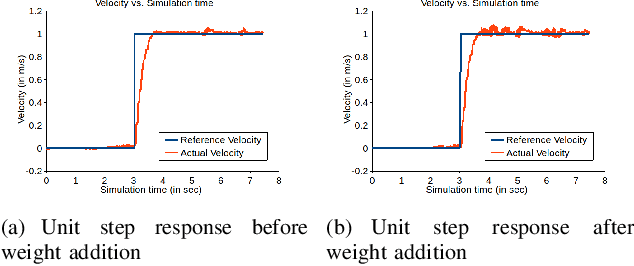
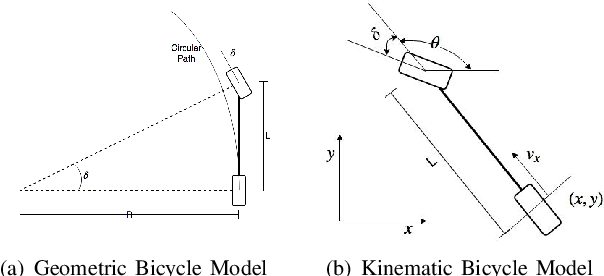
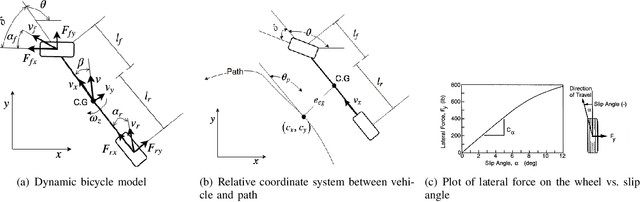
This article is an overview of the various literature on path tracking methods and their implementation in simulation and realistic operating environments.The scope of this study includes analysis, implementation,tuning, and comparison of some selected path tracking methods commonly used in practice for trajectory tracking in autonomous vehicles. Many of these methods are applicable at low speed due to the linear assumption for the system model, and hence, some methods are also included that consider nonlinearities present in lateral vehicle dynamics during high-speed navigation. The performance evaluation and comparison of tracking methods are carried out on realistic simulations and a dedicated instrumented passenger car, Mahindra e2o, to get a performance idea of all the methods in realistic operating conditions and develop tuning methodologies for each of the methods. It has been observed that our model predictive control-based approach is able to perform better compared to the others in medium velocity ranges.
KD-Lib: A PyTorch library for Knowledge Distillation, Pruning and Quantization
Nov 30, 2020
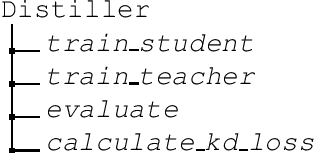
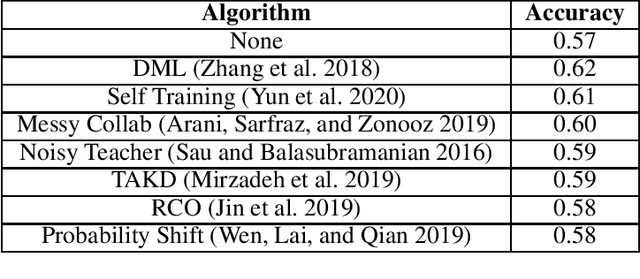
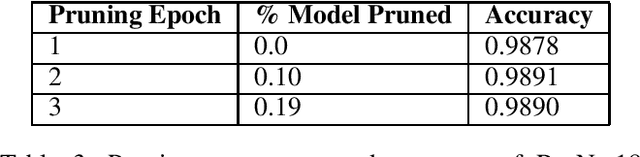
In recent years, the growing size of neural networks has led to a vast amount of research concerning compression techniques to mitigate the drawbacks of such large sizes. Most of these research works can be categorized into three broad families : Knowledge Distillation, Pruning, and Quantization. While there has been steady research in this domain, adoption and commercial usage of the proposed techniques has not quite progressed at the rate. We present KD-Lib, an open-source PyTorch based library, which contains state-of-the-art modular implementations of algorithms from the three families on top of multiple abstraction layers. KD-Lib is model and algorithm-agnostic, with extended support for hyperparameter tuning using Optuna and Tensorboard for logging and monitoring. The library can be found at - https://github.com/SforAiDl/KD_Lib.
An Autoencoder Based Approach to Simulate Sports Games
Jul 16, 2020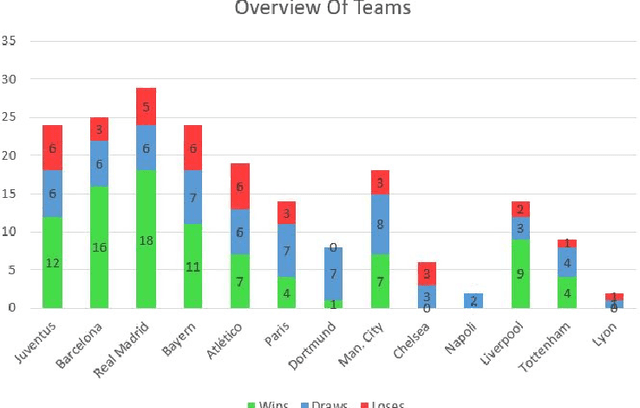
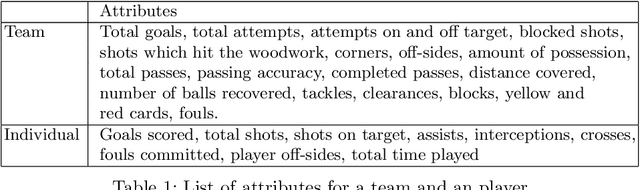
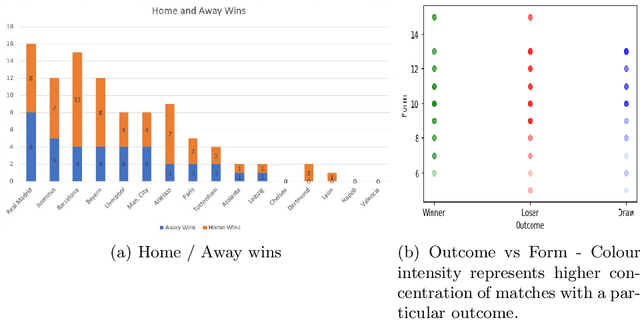
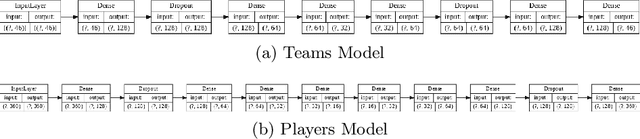
Sports data has become widely available in the recent past. With the improvement of machine learning techniques, there have been attempts to use sports data to analyze not only the outcome of individual games but also to improve insights and strategies. The outbreak of COVID-19 has interrupted sports leagues globally, giving rise to increasing questions and speculations about the outcome of this season's leagues. What if the season was not interrupted and concluded normally? Which teams would end up winning trophies? Which players would perform the best? Which team would end their season on a high and which teams would fail to keep up with the pressure? We aim to tackle this problem and develop a solution. In this paper, we proposeUCLData, which is a dataset containing detailed information of UEFA Champions League games played over the past six years. We also propose a novel autoencoder based machine learning pipeline that can come up with a story on how the rest of the season will pan out.
Safe Planning for Self-Driving Via Adaptive Constrained ILQR
Mar 05, 2020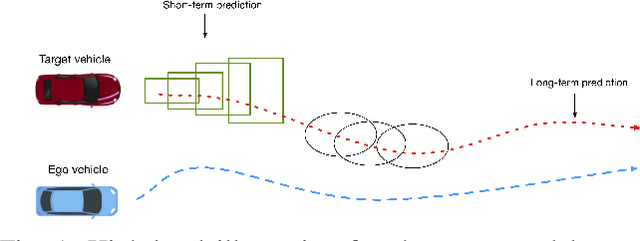
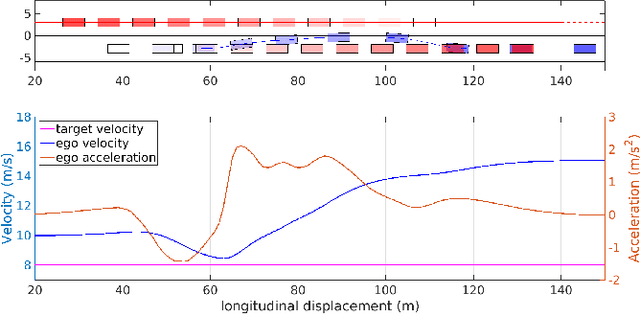
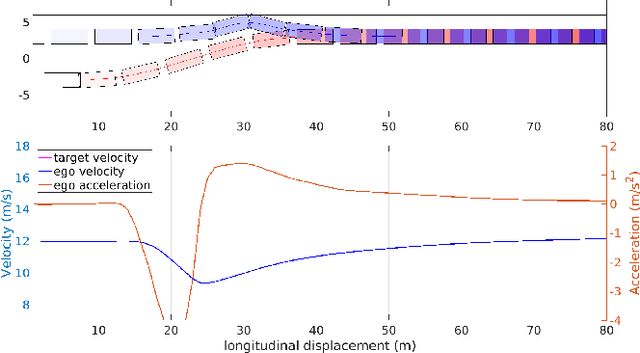
Constrained Iterative Linear Quadratic Regulator (CILQR), a variant of ILQR, has been recently proposed for motion planning problems of autonomous vehicles to deal with constraints such as obstacle avoidance and reference tracking. However, the previous work considers either deterministic trajectories or persistent prediction for target dynamical obstacles. The other drawback is lack of generality - it requires manual weight tuning for different scenarios. In this paper, two significant improvements are achieved. Firstly, a two-stage uncertainty-aware prediction is proposed. The short-term prediction with safety guarantee based on reachability analysis is responsible for dealing with extreme maneuvers conducted by target vehicles. The long-term prediction leveraging an adaptive least square filter preserves the long-term optimality of the planned trajectory since using reachability only for long-term prediction is too pessimistic and makes the planner over-conservative. Secondly, to allow a wider coverage over different scenarios and to avoid tedious parameter tuning case by case, this paper designs a scenario-based analytical function taking the states from the ego vehicle and the target vehicle as input, and carrying weights of a cost function as output. It allows the ego vehicle to execute multiple behaviors (such as lane-keeping and overtaking) under a single planner. We demonstrate safety, effectiveness, and real-time performance of the proposed planner in simulations.