 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Adversarial-Driven Experimental Study on Deep Learning for RF Fingerprinting
Jul 18, 2025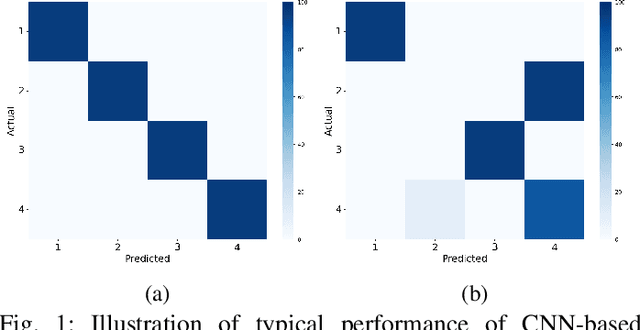



Radio frequency (RF) fingerprinting, which extracts unique hardware imperfections of radio devices, has emerged as a promising physical-layer device identification mechanism in zero trust architectures and beyond 5G networks. In particular, deep learning (DL) methods have demonstrated state-of-the-art performance in this domain. However, existing approaches have primarily focused on enhancing system robustness against temporal and spatial variations in wireless environments, while the security vulnerabilities of these DL-based approaches have often been overlooked. In this work, we systematically investigate the security risks of DL-based RF fingerprinting systems through an adversarial-driven experimental analysis. We observe a consistent misclassification behavior for DL models under domain shifts, where a device is frequently misclassified as another specific one. Our analysis based on extensive real-world experiments demonstrates that this behavior can be exploited as an effective backdoor to enable external attackers to intrude into the system. Furthermore, we show that training DL models on raw received signals causes the models to entangle RF fingerprints with environmental and signal-pattern features, creating additional attack vectors that cannot be mitigated solely through post-processing security methods such as confidence thresholds.
Secret-Free Device Pairing in the mmWave Band
Jun 29, 2023



Many Next Generation (NextG) applications feature devices that are capable of communicating and sensing in the Millimeter-Wave (mmWave) bands. Trust establishment is an important first step to bootstrap secure mmWave communication links, which is challenging due to the lack of prior secrets and the fact that traditional cryptographic authentication methods cannot bind digital trust with physical properties. Previously, context-based device pairing approaches were proposed to extract shared secrets from common context, using various sensing modalities. However, they suffer from various limitations in practicality and security. In this work, we propose the first secret-free device pairing scheme in the mmWave band that explores the unique physical-layer properties of mmWave communications. Our basic idea is to let Alice and Bob derive common randomness by sampling physical activity in the surrounding environment that disturbs their wireless channel. They construct reliable fingerprints of the activity by extracting event timing information from the channel state. We further propose an uncoordinated path hopping mechanism to resolve the challenges of beam alignment for activity sensing without prior trust. A key novelty of our protocol is that it remains secure against both co-located passive adversaries and active Man-in-the-Middle attacks, which is not possible with existing context-based pairing approaches. We implement our protocol in a 28GHz mmWave testbed, and experimentally evaluate its security in realistic indoor environments. Results show that our protocol can effectively thwart several different types of adversaries.
Safe Planning for Self-Driving Via Adaptive Constrained ILQR
Mar 05, 2020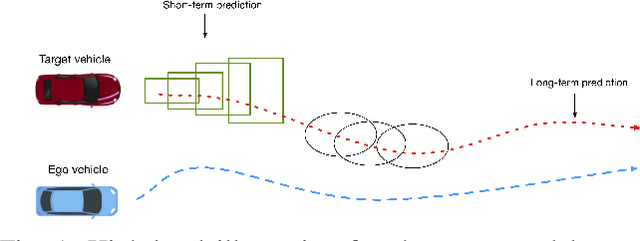
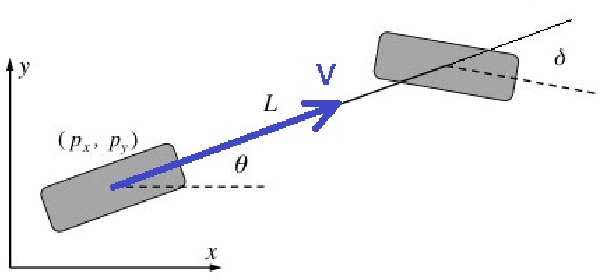
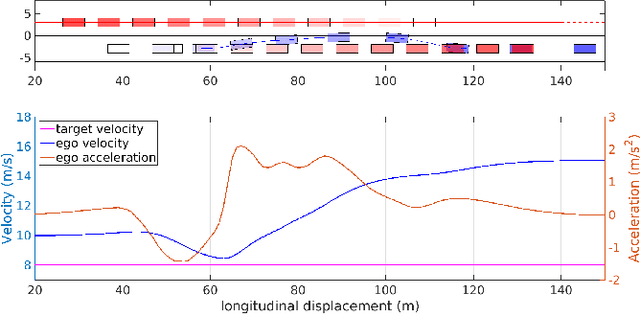
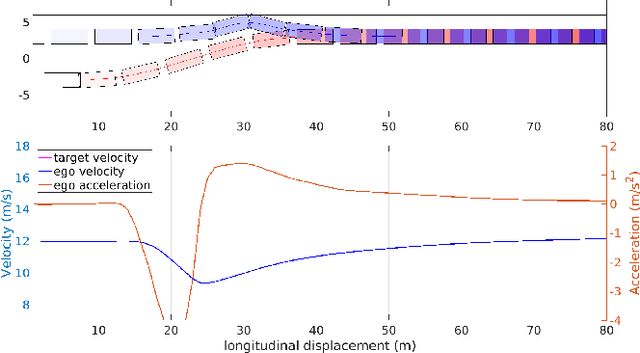
Constrained Iterative Linear Quadratic Regulator (CILQR), a variant of ILQR, has been recently proposed for motion planning problems of autonomous vehicles to deal with constraints such as obstacle avoidance and reference tracking. However, the previous work considers either deterministic trajectories or persistent prediction for target dynamical obstacles. The other drawback is lack of generality - it requires manual weight tuning for different scenarios. In this paper, two significant improvements are achieved. Firstly, a two-stage uncertainty-aware prediction is proposed. The short-term prediction with safety guarantee based on reachability analysis is responsible for dealing with extreme maneuvers conducted by target vehicles. The long-term prediction leveraging an adaptive least square filter preserves the long-term optimality of the planned trajectory since using reachability only for long-term prediction is too pessimistic and makes the planner over-conservative. Secondly, to allow a wider coverage over different scenarios and to avoid tedious parameter tuning case by case, this paper designs a scenario-based analytical function taking the states from the ego vehicle and the target vehicle as input, and carrying weights of a cost function as output. It allows the ego vehicle to execute multiple behaviors (such as lane-keeping and overtaking) under a single planner. We demonstrate safety, effectiveness, and real-time performance of the proposed planner in simulations.