 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimization Based Collision Avoidance for Multi-Agent DynamicalSystems in Goal Reaching Task
Aug 03, 2021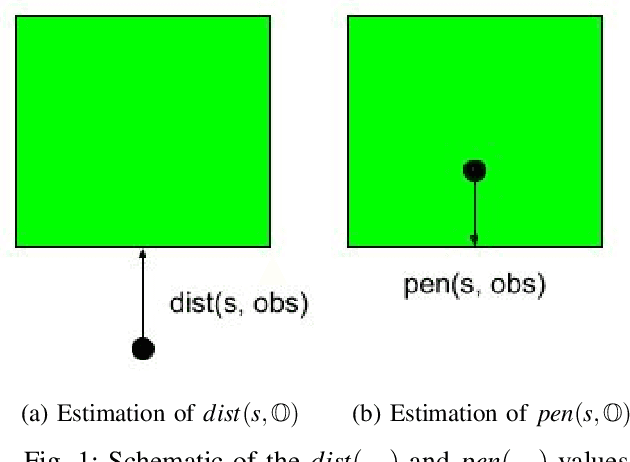
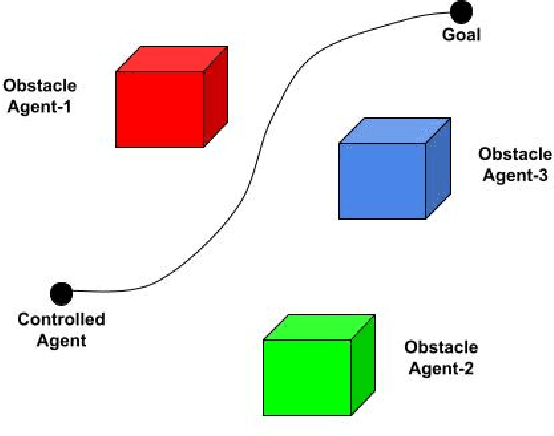
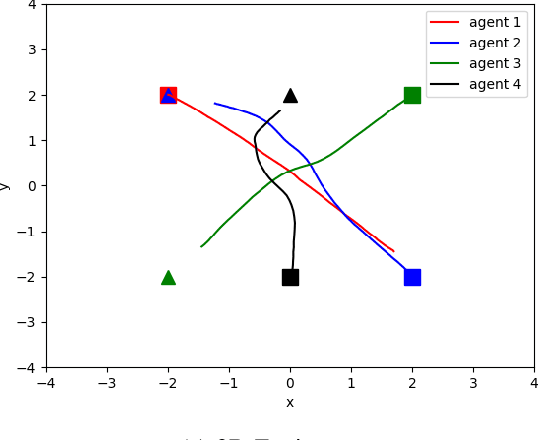
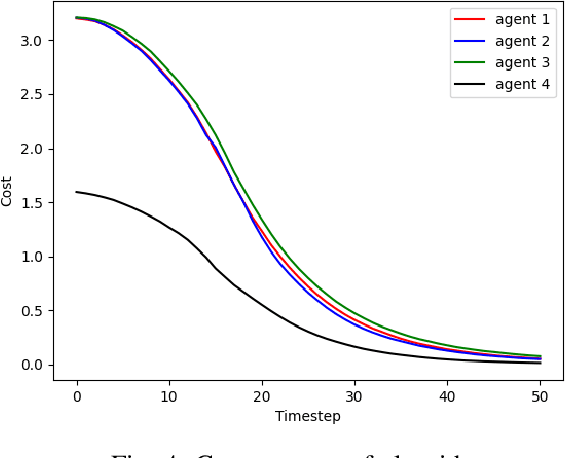
This work presents a distributed MPC-based approach to solving the problem of multi-agent point-to-point transition with optimization-based collision avoidance. The problem is formulated, motivated by the work on collision avoidance for multi-agent systems and dynamic obstacles. With modifications to the formulation, the problem is converted into a distributed problem with a separable objective and coupled constraints. The problem is divided into local sub-problems and solved using Alternating Directions Method of Multipliers(ADMM) applied on an augmented local lagrangian objective.This work aims to understand the multi-agent point-to-point transition problem as an extension of optimization-based collision avoidance and analyze the aspects of computational times, reliability, and optimality of the solution obtained.
Ant Colony Optimization and Hypergraph Covering Problems
Dec 30, 2013Ant Colony Optimization (ACO) is a very popular metaheuristic for solving computationally hard combinatorial optimization problems. Runtime analysis of ACO with respect to various pseudo-boolean functions and different graph based combinatorial optimization problems has been taken up in recent years. In this paper, we investigate the runtime behavior of an MMAS*(Max-Min Ant System) ACO algorithm on some well known hypergraph covering problems that are NP-Hard. In particular, we have addressed the Minimum Edge Cover problem, the Minimum Vertex Cover problem and the Maximum Weak- Independent Set problem. The influence of pheromone values and heuristic information on the running time is analysed. The results indicate that the heuristic information has greater impact towards improving the expected optimization time as compared to pheromone values. For certain instances of hypergraphs, we show that the MMAS* algorithm gives a constant order expected optimization time when the dominance of heuristic information is suitably increased.
An Adaptive Quantum-inspired Differential Evolution Algorithm for 0-1 Knapsack Problem
Jan 01, 2011



Differential evolution (DE) is a population based evolutionary algorithm widely used for solving multidimensional global optimization problems over continuous spaces. However, the design of its operators makes it unsuitable for many real-life constrained combinatorial optimization problems which operate on binary space. On the other hand, the quantum inspired evolutionary algorithm (QEA) is very well suitable for handling such problems by applying several quantum computing techniques such as Q-bit representation and rotation gate operator, etc. This paper extends the concept of differential operators with adaptive parameter control to the quantum paradigm and proposes the adaptive quantum-inspired differential evolution algorithm (AQDE). The performance of AQDE is found to be significantly superior as compared to QEA and a discrete version of DE on the standard 0-1 knapsack problem for all the considered test cases.
Superior Exploration-Exploitation Balance with Quantum-Inspired Hadamard Walks
Apr 04, 2010


This paper extends the analogies employed in the development of quantum-inspired evolutionary algorithms by proposing quantum-inspired Hadamard walks, called QHW. A novel quantum-inspired evolutionary algorithm, called HQEA, for solving combinatorial optimization problems, is also proposed. The novelty of HQEA lies in it's incorporation of QHW Remote Search and QHW Local Search - the quantum equivalents of classical mutation and local search, that this paper defines. The intuitive reasoning behind this approach, and the exploration-exploitation balance thus occurring is explained. From the results of the experiments carried out on the 0,1-knapsack problem, HQEA performs significantly better than a conventional genetic algorithm, CGA, and two quantum-inspired evolutionary algorithms - QEA and NQEA, in terms of convergence speed and accuracy.
* 2 pages, 2 figures, 1 table, late-breaking