 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnblur-SLAM: Dense Neural SLAM for Blurry Inputs
Mar 26, 2026We propose Unblur-SLAM, a novel RGB SLAM pipeline for sharp 3D reconstruction from blurred image inputs. In contrast to previous work, our approach is able to handle different types of blur and demonstrates state-of-the-art performance in the presence of both motion blur and defocus blur. Moreover, we adjust the computation effort with the amount of blur in the input image. As a first stage, our method uses a feed-forward image deblurring model for which we propose a suitable training scheme that can improve both tracking and mapping modules. Frames that are successfully deblurred by the feed-forward network obtain refined poses and depth through local-global multi-view optimization and loop closure. Frames that fail the first stage deblurring are directly modeled through the global 3DGS representation and an additional blur network to model multiple blurred sub-frames and simulate the blur formation process in 3D space, thereby learning sharp details and refined sub-frame poses. Experiments on several real-world datasets demonstrate consistent improvements in both pose estimation and sharp reconstruction results of geometry and texture.
Benchmarking Efficient & Effective Camera Pose Estimation Strategies for Novel View Synthesis
Mar 20, 2026Novel view synthesis (NVS) approaches such as NeRFs or 3DGS can produce photo-realistic 3D scene representation from a set of images with known extrinsic and intrinsic parameters. The necessary camera poses and calibrations are typically obtained from the images via Structure-from-Motion (SfM). Classical SfM approaches rely on local feature matches between the images to estimate both the poses and a sparse 3D model of the scene, using bundle adjustment to refine initial pose, intrinsics, and geometry estimates. In order to increase run-time efficiency, recent SfM systems forgo optimization via bundle adjustment. Instead, they train feed-forward (transformer-based) neural networks to directly regress camera parameters and the 3D structure. While orders of magnitude more efficient, such recent works produce significantly less accurate estimates. To stimulate research on developing SfM approaches that are both efficient \emph{and} effective, this paper develops a benchmark focused on SfM for novel view synthesis. Using existing datasets and two simple strategies for making the reconstruction process more efficient, we show that: (1) simply using fewer features already significantly accelerates classical SfM methods while maintaining high pose accuracy. (2) using feed-forward networks to obtain initial estimates and refining them using classical SfM techniques leads to the best efficiency-effectiveness trade-off. We will make our benchmark and code publicly available.
From Rays to Projections: Better Inputs for Feed-Forward View Synthesis
Jan 08, 2026Feed-forward view synthesis models predict a novel view in a single pass with minimal 3D inductive bias. Existing works encode cameras as Plücker ray maps, which tie predictions to the arbitrary world coordinate gauge and make them sensitive to small camera transformations, thereby undermining geometric consistency. In this paper, we ask what inputs best condition a model for robust and consistent view synthesis. We propose projective conditioning, which replaces raw camera parameters with a target-view projective cue that provides a stable 2D input. This reframes the task from a brittle geometric regression problem in ray space to a well-conditioned target-view image-to-image translation problem. Additionally, we introduce a masked autoencoding pretraining strategy tailored to this cue, enabling the use of large-scale uncalibrated data for pretraining. Our method shows improved fidelity and stronger cross-view consistency compared to ray-conditioned baselines on our view-consistency benchmark. It also achieves state-of-the-art quality on standard novel view synthesis benchmarks.
Chorus: Multi-Teacher Pretraining for Holistic 3D Gaussian Scene Encoding
Dec 22, 2025While 3DGS has emerged as a high-fidelity scene representation, encoding rich, general-purpose features directly from its primitives remains under-explored. We address this gap by introducing Chorus, a multi-teacher pretraining framework that learns a holistic feed-forward 3D Gaussian Splatting (3DGS) scene encoder by distilling complementary signals from 2D foundation models. Chorus employs a shared 3D encoder and teacher-specific projectors to learn from language-aligned, generalist, and object-aware teachers, encouraging a shared embedding space that captures signals from high-level semantics to fine-grained structure. We evaluate Chorus on a wide range of tasks: open-vocabulary semantic and instance segmentation, linear and decoder probing, as well as data-efficient supervision. Besides 3DGS, we also test Chorus on several benchmarks that only support point clouds by pretraining a variant using only Gaussians' centers, colors, estimated normals as inputs. Interestingly, this encoder shows strong transfer and outperforms the point clouds baseline while using 39.9 times fewer training scenes. Finally, we propose a render-and-distill adaptation that facilitates out-of-domain finetuning. Our code and model will be released upon publication.
Edge-Centric Relational Reasoning for 3D Scene Graph Prediction
Nov 19, 2025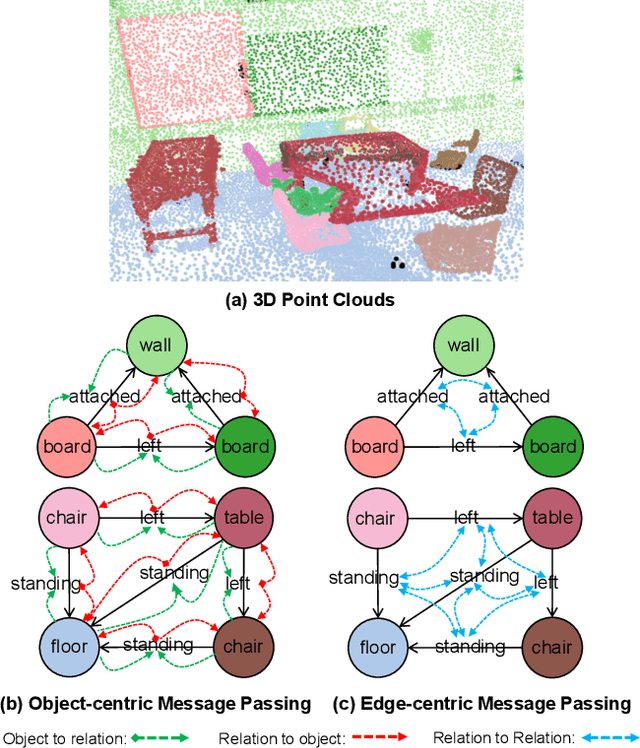
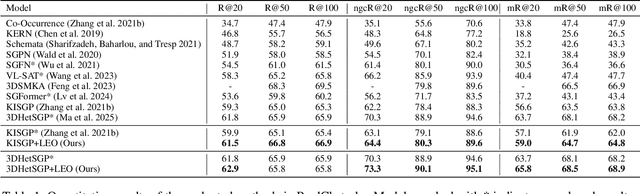
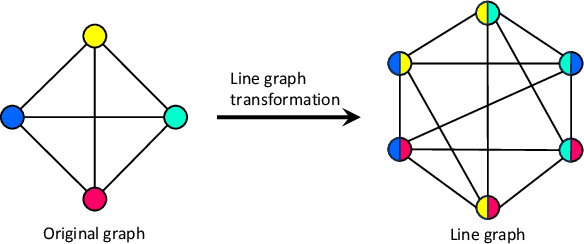
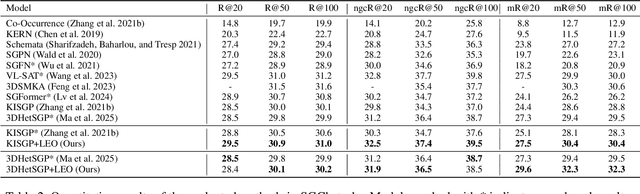
3D scene graph prediction aims to abstract complex 3D environments into structured graphs consisting of objects and their pairwise relationships. Existing approaches typically adopt object-centric graph neural networks, where relation edge features are iteratively updated by aggregating messages from connected object nodes. However, this design inherently restricts relation representations to pairwise object context, making it difficult to capture high-order relational dependencies that are essential for accurate relation prediction. To address this limitation, we propose a Link-guided Edge-centric relational reasoning framework with Object-aware fusion, namely LEO, which enables progressive reasoning from relation-level context to object-level understanding. Specifically, LEO first predicts potential links between object pairs to suppress irrelevant edges, and then transforms the original scene graph into a line graph where each relation is treated as a node. A line graph neural network is applied to perform edge-centric relational reasoning to capture inter-relation context. The enriched relation features are subsequently integrated into the original object-centric graph to enhance object-level reasoning and improve relation prediction. Our framework is model-agnostic and can be integrated with any existing object-centric method. Experiments on the 3DSSG dataset with two competitive baselines show consistent improvements, highlighting the effectiveness of our edge-to-object reasoning paradigm.
MCGS-SLAM: A Multi-Camera SLAM Framework Using Gaussian Splatting for High-Fidelity Mapping
Sep 17, 2025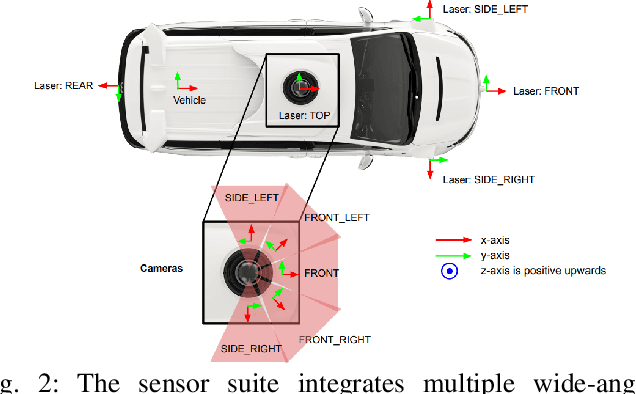
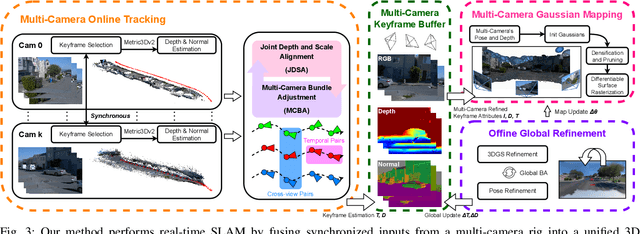
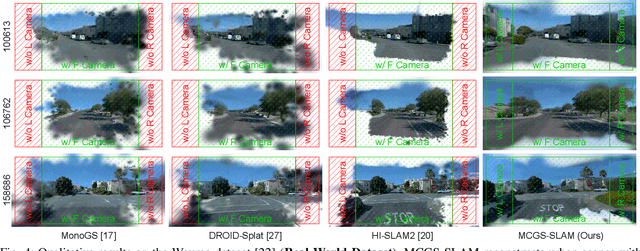
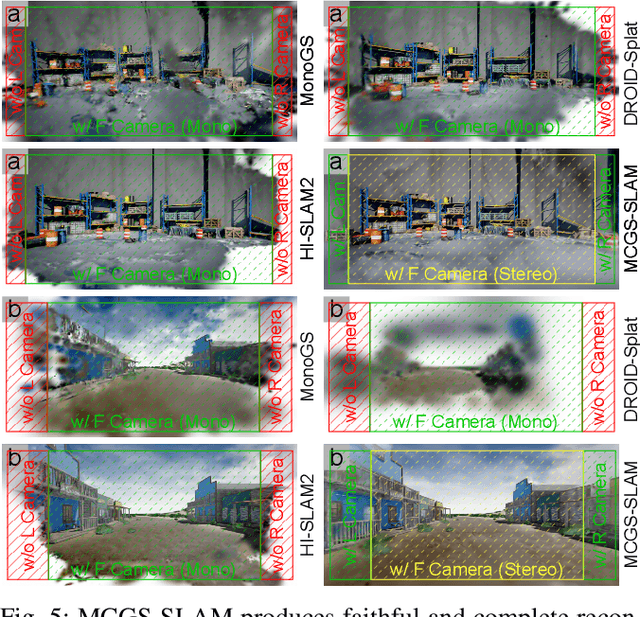
Recent progress in dense SLAM has primarily targeted monocular setups, often at the expense of robustness and geometric coverage. We present MCGS-SLAM, the first purely RGB-based multi-camera SLAM system built on 3D Gaussian Splatting (3DGS). Unlike prior methods relying on sparse maps or inertial data, MCGS-SLAM fuses dense RGB inputs from multiple viewpoints into a unified, continuously optimized Gaussian map. A multi-camera bundle adjustment (MCBA) jointly refines poses and depths via dense photometric and geometric residuals, while a scale consistency module enforces metric alignment across views using low-rank priors. The system supports RGB input and maintains real-time performance at large scale. Experiments on synthetic and real-world datasets show that MCGS-SLAM consistently yields accurate trajectories and photorealistic reconstructions, usually outperforming monocular baselines. Notably, the wide field of view from multi-camera input enables reconstruction of side-view regions that monocular setups miss, critical for safe autonomous operation. These results highlight the promise of multi-camera Gaussian Splatting SLAM for high-fidelity mapping in robotics and autonomous driving.
SceneSplat++: A Large Dataset and Comprehensive Benchmark for Language Gaussian Splatting
Jun 10, 20253D Gaussian Splatting (3DGS) serves as a highly performant and efficient encoding of scene geometry, appearance, and semantics. Moreover, grounding language in 3D scenes has proven to be an effective strategy for 3D scene understanding. Current Language Gaussian Splatting line of work fall into three main groups: (i) per-scene optimization-based, (ii) per-scene optimization-free, and (iii) generalizable approach. However, most of them are evaluated only on rendered 2D views of a handful of scenes and viewpoints close to the training views, limiting ability and insight into holistic 3D understanding. To address this gap, we propose the first large-scale benchmark that systematically assesses these three groups of methods directly in 3D space, evaluating on 1060 scenes across three indoor datasets and one outdoor dataset. Benchmark results demonstrate a clear advantage of the generalizable paradigm, particularly in relaxing the scene-specific limitation, enabling fast feed-forward inference on novel scenes, and achieving superior segmentation performance. We further introduce GaussianWorld-49K a carefully curated 3DGS dataset comprising around 49K diverse indoor and outdoor scenes obtained from multiple sources, with which we demonstrate the generalizable approach could harness strong data priors. Our codes, benchmark, and datasets will be made public to accelerate research in generalizable 3DGS scene understanding.
Gaussian Mapping for Evolving Scenes
Jun 07, 2025Mapping systems with novel view synthesis (NVS) capabilities are widely used in computer vision, with augmented reality, robotics, and autonomous driving applications. Most notably, 3D Gaussian Splatting-based systems show high NVS performance; however, many current approaches are limited to static scenes. While recent works have started addressing short-term dynamics (motion within the view of the camera), long-term dynamics (the scene evolving through changes out of view) remain less explored. To overcome this limitation, we introduce a dynamic scene adaptation mechanism that continuously updates the 3D representation to reflect the latest changes. In addition, since maintaining geometric and semantic consistency remains challenging due to stale observations disrupting the reconstruction process, we propose a novel keyframe management mechanism that discards outdated observations while preserving as much information as possible. We evaluate Gaussian Mapping for Evolving Scenes (GaME) on both synthetic and real-world datasets and find it to be more accurate than the state of the art.
ToF-Splatting: Dense SLAM using Sparse Time-of-Flight Depth and Multi-Frame Integration
Apr 23, 2025Time-of-Flight (ToF) sensors provide efficient active depth sensing at relatively low power budgets; among such designs, only very sparse measurements from low-resolution sensors are considered to meet the increasingly limited power constraints of mobile and AR/VR devices. However, such extreme sparsity levels limit the seamless usage of ToF depth in SLAM. In this work, we propose ToF-Splatting, the first 3D Gaussian Splatting-based SLAM pipeline tailored for using effectively very sparse ToF input data. Our approach improves upon the state of the art by introducing a multi-frame integration module, which produces dense depth maps by merging cues from extremely sparse ToF depth, monocular color, and multi-view geometry. Extensive experiments on both synthetic and real sparse ToF datasets demonstrate the viability of our approach, as it achieves state-of-the-art tracking and mapping performances on reference datasets.
ODHSR: Online Dense 3D Reconstruction of Humans and Scenes from Monocular Videos
Apr 18, 2025
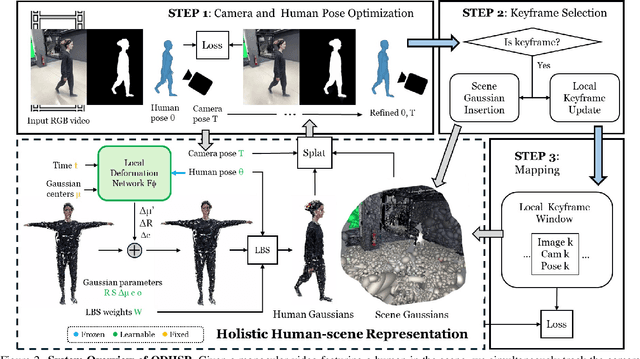

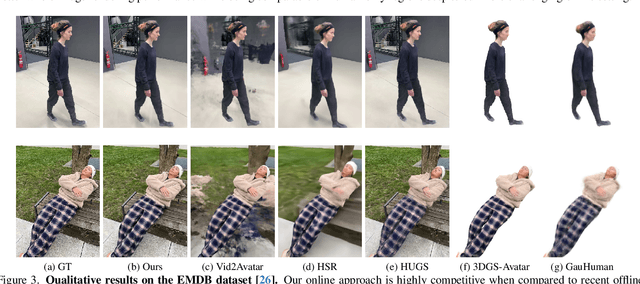
Creating a photorealistic scene and human reconstruction from a single monocular in-the-wild video figures prominently in the perception of a human-centric 3D world. Recent neural rendering advances have enabled holistic human-scene reconstruction but require pre-calibrated camera and human poses, and days of training time. In this work, we introduce a novel unified framework that simultaneously performs camera tracking, human pose estimation and human-scene reconstruction in an online fashion. 3D Gaussian Splatting is utilized to learn Gaussian primitives for humans and scenes efficiently, and reconstruction-based camera tracking and human pose estimation modules are designed to enable holistic understanding and effective disentanglement of pose and appearance. Specifically, we design a human deformation module to reconstruct the details and enhance generalizability to out-of-distribution poses faithfully. Aiming to learn the spatial correlation between human and scene accurately, we introduce occlusion-aware human silhouette rendering and monocular geometric priors, which further improve reconstruction quality. Experiments on the EMDB and NeuMan datasets demonstrate superior or on-par performance with existing methods in camera tracking, human pose estimation, novel view synthesis and runtime. Our project page is at https://eth-ait.github.io/ODHSR.