 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGSTAR: Gaussian Surface Tracking and Reconstruction
Jan 17, 2025



3D Gaussian Splatting techniques have enabled efficient photo-realistic rendering of static scenes. Recent works have extended these approaches to support surface reconstruction and tracking. However, tracking dynamic surfaces with 3D Gaussians remains challenging due to complex topology changes, such as surfaces appearing, disappearing, or splitting. To address these challenges, we propose GSTAR, a novel method that achieves photo-realistic rendering, accurate surface reconstruction, and reliable 3D tracking for general dynamic scenes with changing topology. Given multi-view captures as input, GSTAR binds Gaussians to mesh faces to represent dynamic objects. For surfaces with consistent topology, GSTAR maintains the mesh topology and tracks the meshes using Gaussians. In regions where topology changes, GSTAR adaptively unbinds Gaussians from the mesh, enabling accurate registration and the generation of new surfaces based on these optimized Gaussians. Additionally, we introduce a surface-based scene flow method that provides robust initialization for tracking between frames. Experiments demonstrate that our method effectively tracks and reconstructs dynamic surfaces, enabling a range of applications. Our project page with the code release is available at https://chengwei-zheng.github.io/GSTAR/.
WorldPose: A World Cup Dataset for Global 3D Human Pose Estimation
Jan 06, 2025We present WorldPose, a novel dataset for advancing research in multi-person global pose estimation in the wild, featuring footage from the 2022 FIFA World Cup. While previous datasets have primarily focused on local poses, often limited to a single person or in constrained, indoor settings, the infrastructure deployed for this sporting event allows access to multiple fixed and moving cameras in different stadiums. We exploit the static multi-view setup of HD cameras to recover the 3D player poses and motions with unprecedented accuracy given capture areas of more than 1.75 acres. We then leverage the captured players' motions and field markings to calibrate a moving broadcasting camera. The resulting dataset comprises more than 80 sequences with approx 2.5 million 3D poses and a total traveling distance of over 120 km. Subsequently, we conduct an in-depth analysis of the SOTA methods for global pose estimation. Our experiments demonstrate that WorldPose challenges existing multi-person techniques, supporting the potential for new research in this area and others, such as sports analysis. All pose annotations (in SMPL format), broadcasting camera parameters and footage will be released for academic research purposes.
PokeFlex: A Real-World Dataset of Deformable Objects for Robotics
Oct 10, 2024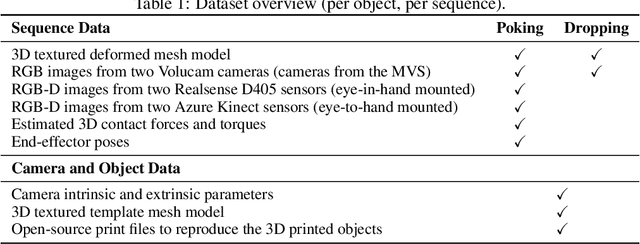
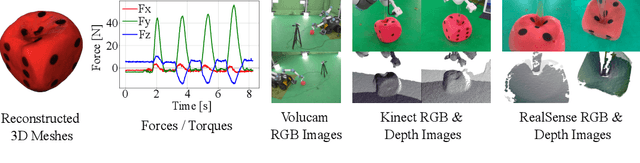
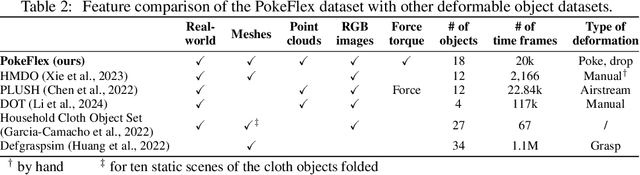
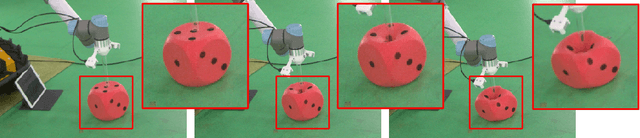
Data-driven methods have shown great potential in solving challenging manipulation tasks, however, their application in the domain of deformable objects has been constrained, in part, by the lack of data. To address this, we propose PokeFlex, a dataset featuring real-world paired and annotated multimodal data that includes 3D textured meshes, point clouds, RGB images, and depth maps. Such data can be leveraged for several downstream tasks such as online 3D mesh reconstruction, and it can potentially enable underexplored applications such as the real-world deployment of traditional control methods based on mesh simulations. To deal with the challenges posed by real-world 3D mesh reconstruction, we leverage a professional volumetric capture system that allows complete 360{\deg} reconstruction. PokeFlex consists of 18 deformable objects with varying stiffness and shapes. Deformations are generated by dropping objects onto a flat surface or by poking the objects with a robot arm. Interaction forces and torques are also reported for the latter case. Using different data modalities, we demonstrated a use case for the PokeFlex dataset in online 3D mesh reconstruction. We refer the reader to our website ( https://pokeflex-dataset.github.io/ ) for demos and examples of our dataset.
PokeFlex: Towards a Real-World Dataset of Deformable Objects for Robotic Manipulation
Sep 25, 2024



Advancing robotic manipulation of deformable objects can enable automation of repetitive tasks across multiple industries, from food processing to textiles and healthcare. Yet robots struggle with the high dimensionality of deformable objects and their complex dynamics. While data-driven methods have shown potential for solving manipulation tasks, their application in the domain of deformable objects has been constrained by the lack of data. To address this, we propose PokeFlex, a pilot dataset featuring real-world 3D mesh data of actively deformed objects, together with the corresponding forces and torques applied by a robotic arm, using a simple poking strategy. Deformations are captured with a professional volumetric capture system that allows for complete 360-degree reconstruction. The PokeFlex dataset consists of five deformable objects with varying stiffness and shapes. Additionally, we leverage the PokeFlex dataset to train a vision model for online 3D mesh reconstruction from a single image and a template mesh. We refer readers to the supplementary material and to our website ( https://pokeflex-dataset.github.io/ ) for demos and examples of our dataset.
EMDB: The Electromagnetic Database of Global 3D Human Pose and Shape in the Wild
Aug 31, 2023


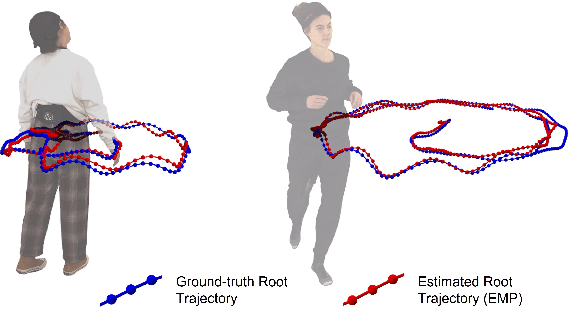
We present EMDB, the Electromagnetic Database of Global 3D Human Pose and Shape in the Wild. EMDB is a novel dataset that contains high-quality 3D SMPL pose and shape parameters with global body and camera trajectories for in-the-wild videos. We use body-worn, wireless electromagnetic (EM) sensors and a hand-held iPhone to record a total of 58 minutes of motion data, distributed over 81 indoor and outdoor sequences and 10 participants. Together with accurate body poses and shapes, we also provide global camera poses and body root trajectories. To construct EMDB, we propose a multi-stage optimization procedure, which first fits SMPL to the 6-DoF EM measurements and then refines the poses via image observations. To achieve high-quality results, we leverage a neural implicit avatar model to reconstruct detailed human surface geometry and appearance, which allows for improved alignment and smoothness via a dense pixel-level objective. Our evaluations, conducted with a multi-view volumetric capture system, indicate that EMDB has an expected accuracy of 2.3 cm positional and 10.6 degrees angular error, surpassing the accuracy of previous in-the-wild datasets. We evaluate existing state-of-the-art monocular RGB methods for camera-relative and global pose estimation on EMDB. EMDB is publicly available under https://ait.ethz.ch/emdb
Robust Real-Time Tracking of Axis-Symmetric Magnets via Neural Networks
Nov 14, 2022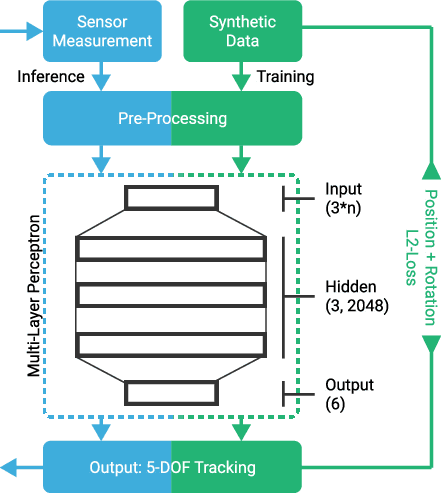
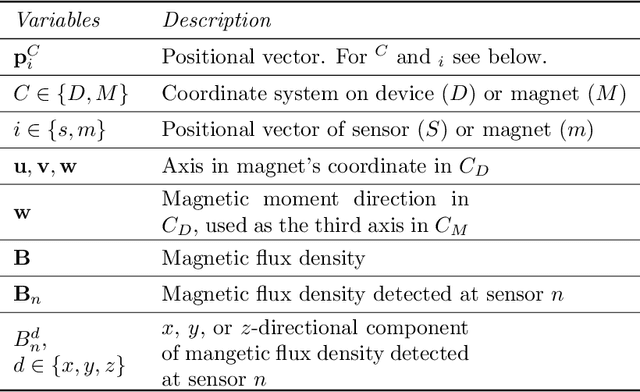
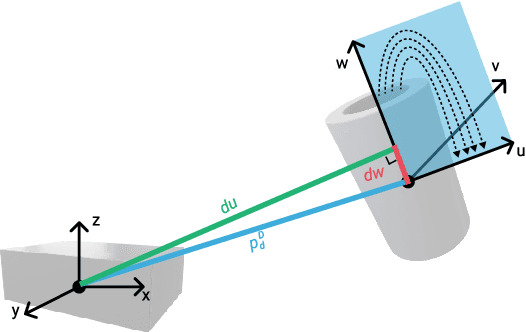
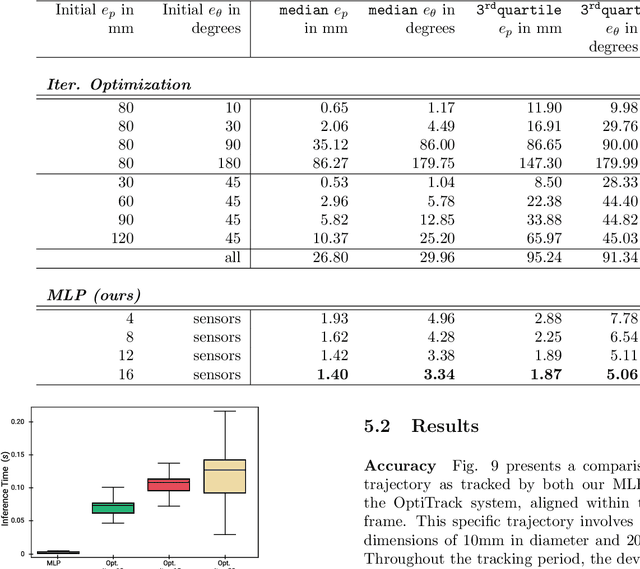
Traditional tracking of magnetic markers leads to high computational costs due to the requirement for iterative optimization procedures. Furthermore, such approaches rely on the magnetic dipole model for the optimization function, leading to inaccurate results anytime a non-spherical magnet gets close to a sensor in the array. We propose to overcome these limitations by using neural networks to infer the marker's position and orientation. Our method can obtain the magnet's five degrees of freedom (5 DoF) in a single inference step without relying on an initial estimation. As a counterpart, the supervised training phase is data intensive. We solve this by generating synthetic, yet realistic, data via Finite Element Methods simulations. A fast and accurate inference largely compensates for the offline training preparation. We evaluate our system using different cylindrical magnets, tracked with a square array of 16 sensors. We use a portable, neural networks-oriented single-board computer for the sensors' reading and the position inference, making our setup very compact. We compared our tracking outputs with vision-based ground truth data. Our prototype implementation tracks $5$ DoF with an averaged positional error of 4mm and orientation error of 8deg within a 0.2x0.2x0.15m working volume.