 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Sensorless, Inherently Compliant Anthropomorphic Musculoskeletal Hand Driven by Electrohydraulic Actuators
Mar 25, 2026Robotic manipulation in unstructured environments requires end-effectors that combine high kinematic dexterity with physical compliance. While traditional rigid hands rely on complex external sensors for safe interaction, electrohydraulic actuators offer a promising alternative. This paper presents the design, control, and evaluation of a novel musculoskeletal robotic hand architecture powered entirely by remote Peano-HASEL actuators, specifically optimized for safe manipulation. By relocating the actuators to the forearm, we functionally isolate the grasping interface from electrical hazards while maintaining a slim, human-like profile. To address the inherently limited linear contraction of these soft actuators, we integrate a 1:2 pulley routing mechanism that mechanically amplifies tendon displacement. The resulting system prioritizes compliant interaction over high payload capacity, leveraging the intrinsic force-limiting characteristics of the actuators to provide a high level of inherent safety. Furthermore, this physical safety is augmented by the self-sensing nature of the HASEL actuators. By simply monitoring the operating current, we achieve real-time grasp detection and closed-loop contact-aware control without relying on external force transducers or encoders. Experimental results validate the system's dexterity and inherent safety, demonstrating the successful execution of various grasp taxonomies and the non-destructive grasping of highly fragile objects, such as a paper balloon. These findings highlight a significant step toward simplified, inherently compliant soft robotic manipulation.
PokeFlex: A Real-World Dataset of Deformable Objects for Robotics
Oct 10, 2024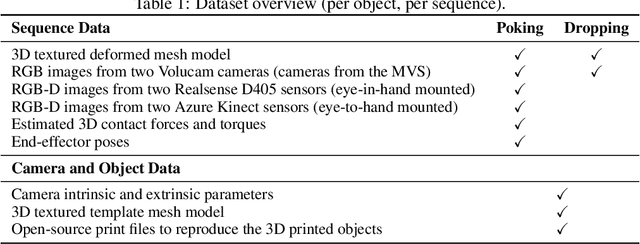
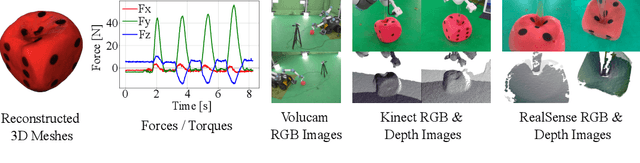
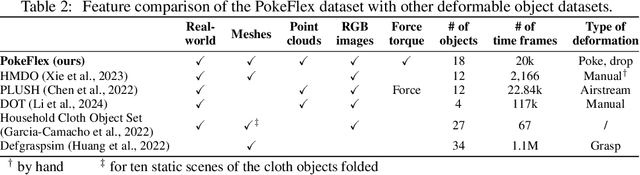
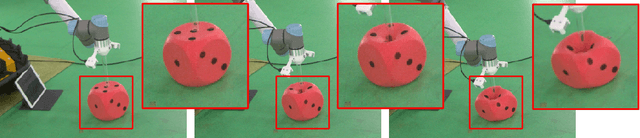
Data-driven methods have shown great potential in solving challenging manipulation tasks, however, their application in the domain of deformable objects has been constrained, in part, by the lack of data. To address this, we propose PokeFlex, a dataset featuring real-world paired and annotated multimodal data that includes 3D textured meshes, point clouds, RGB images, and depth maps. Such data can be leveraged for several downstream tasks such as online 3D mesh reconstruction, and it can potentially enable underexplored applications such as the real-world deployment of traditional control methods based on mesh simulations. To deal with the challenges posed by real-world 3D mesh reconstruction, we leverage a professional volumetric capture system that allows complete 360{\deg} reconstruction. PokeFlex consists of 18 deformable objects with varying stiffness and shapes. Deformations are generated by dropping objects onto a flat surface or by poking the objects with a robot arm. Interaction forces and torques are also reported for the latter case. Using different data modalities, we demonstrated a use case for the PokeFlex dataset in online 3D mesh reconstruction. We refer the reader to our website ( https://pokeflex-dataset.github.io/ ) for demos and examples of our dataset.
Stretchable Electrohydraulic Artificial Muscle for Full Motion Ranges in Musculoskeletal Antagonistic Joints
Sep 17, 2024Artificial muscles play a crucial role in musculoskeletal robotics and prosthetics to approximate the force-generating functionality of biological muscle. However, current artificial muscle systems are typically limited to either contraction or extension, not both. This limitation hinders the development of fully functional artificial musculoskeletal systems. We address this challenge by introducing an artificial antagonistic muscle system capable of both contraction and extension. Our design integrates non-stretchable electrohydraulic soft actuators (HASELs) with electrostatic clutches within an antagonistic musculoskeletal framework. This configuration enables an antagonistic joint to achieve a full range of motion without displacement loss due to tendon slack. We implement a synchronization method to coordinate muscle and clutch units, ensuring smooth motion profiles and speeds. This approach facilitates seamless transitions between antagonistic muscles at operational frequencies of up to 3.2 Hz. While our prototype utilizes electrohydraulic actuators, this muscle-clutch concept is adaptable to other non-stretchable artificial muscles, such as McKibben actuators, expanding their capability for extension and full range of motion in antagonistic setups. Our design represents a significant advancement in the development of fundamental components for more functional and efficient artificial musculoskeletal systems, bringing their capabilities closer to those of their biological counterparts.
Low Voltage Electrohydraulic Actuators for Untethered Robotics
Jun 01, 2023Rigid robots can be precise in repetitive tasks but struggle in unstructured environments. Nature's versatility in such environments inspires researchers to develop biomimetic robots that incorporate compliant and contracting artificial muscles. Among the recently proposed artificial muscle technologies, electrohydraulic actuators are promising since they offer comparable performance to mammalian muscles in terms of speed and power density. However, they require high driving voltages and have safety concerns due to exposed electrodes. These high voltages lead to either bulky or inefficient driving electronics that make untethered, high-degree-of-freedom bio-inspired robots difficult to realize. Here, we present low voltage electrohydraulic actuators (LEAs) that match mammalian skeletal muscles in average power density (50.5 W/kg) and peak strain rate (971 percent/s) at a driving voltage of just 1100 V. This driving voltage is approx. 5 - 7 times lower compared to other electrohydraulic actuators using paraelectric dielectrics. Furthermore, LEAs are safe to touch, waterproof, and self-clearing, which makes them easy to implement in wearables and robotics. We characterize, model, and physically validate key performance metrics of the actuator and compare its performance to state-of-the-art electrohydraulic designs. Finally, we demonstrate the utility of our actuators on two muscle-based electrohydraulic robots: an untethered soft robotic swimmer and a robotic gripper. We foresee that LEAs can become a key building block for future highly-biomimetic untethered robots and wearables with many independent artificial muscles such as biomimetic hands, faces, or exoskeletons.
Computational Design of Active Kinesthetic Garments
Oct 14, 2022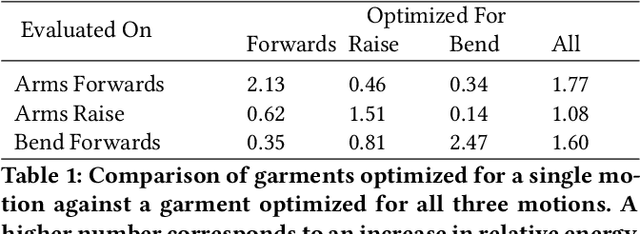
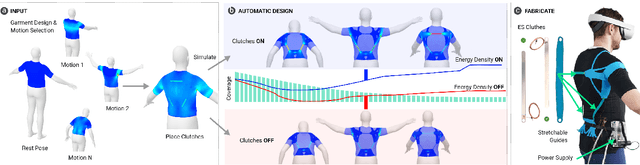
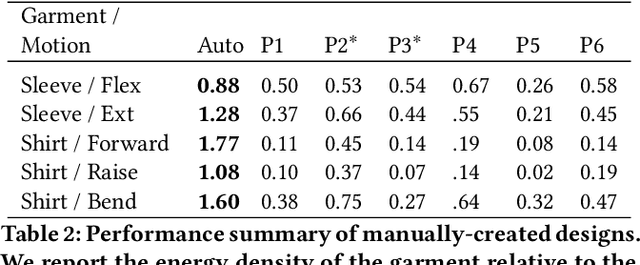
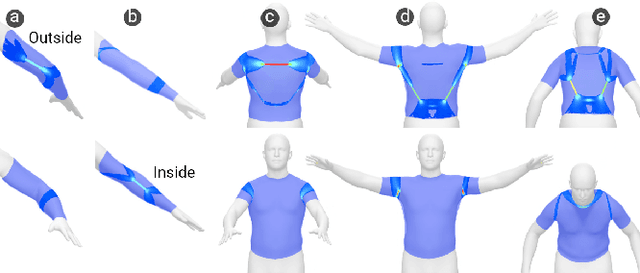
Garments with the ability to provide kinesthetic force-feedback on-demand can augment human capabilities in a non-obtrusive way, enabling numerous applications in VR haptics, motion assistance, and robotic control. However, designing such garments is a complex, and often manual task, particularly when the goal is to resist multiple motions with a single design. In this work, we propose a computational pipeline for designing connecting structures between active components - one of the central challenges in this context. We focus on electrostatic (ES) clutches that are compliant in their passive state while strongly resisting elongation when activated. Our method automatically computes optimized connecting structures that efficiently resist a range of pre-defined body motions on demand. We propose a novel dual-objective optimization approach to simultaneously maximize the resistance to motion when clutches are active, while minimizing resistance when inactive. We demonstrate our method on a set of problems involving different body sites and a range of motions. We further fabricate and evaluate a subset of our automatically created designs against manually created baselines using mechanical testing and in a VR pointing study.