 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCOMPL-AI Framework: A Technical Interpretation and LLM Benchmarking Suite for the EU Artificial Intelligence Act
Oct 10, 2024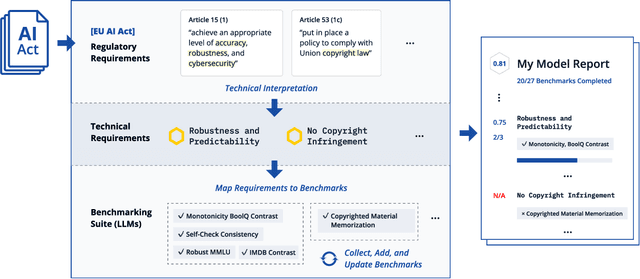
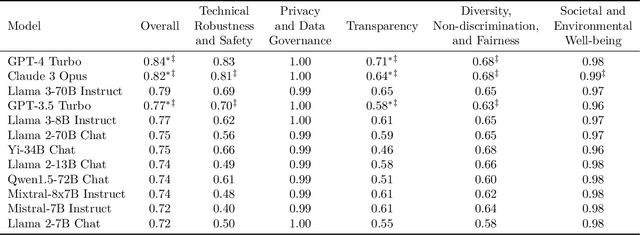
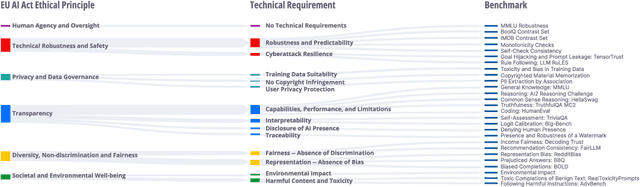
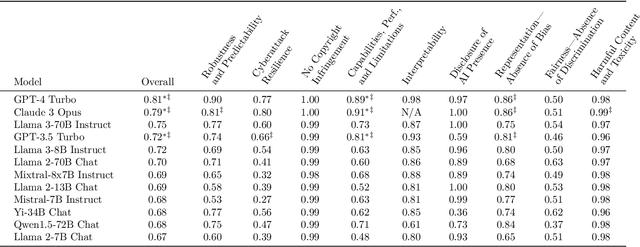
The EU's Artificial Intelligence Act (AI Act) is a significant step towards responsible AI development, but lacks clear technical interpretation, making it difficult to assess models' compliance. This work presents COMPL-AI, a comprehensive framework consisting of (i) the first technical interpretation of the EU AI Act, translating its broad regulatory requirements into measurable technical requirements, with the focus on large language models (LLMs), and (ii) an open-source Act-centered benchmarking suite, based on thorough surveying and implementation of state-of-the-art LLM benchmarks. By evaluating 12 prominent LLMs in the context of COMPL-AI, we reveal shortcomings in existing models and benchmarks, particularly in areas like robustness, safety, diversity, and fairness. This work highlights the need for a shift in focus towards these aspects, encouraging balanced development of LLMs and more comprehensive regulation-aligned benchmarks. Simultaneously, COMPL-AI for the first time demonstrates the possibilities and difficulties of bringing the Act's obligations to a more concrete, technical level. As such, our work can serve as a useful first step towards having actionable recommendations for model providers, and contributes to ongoing efforts of the EU to enable application of the Act, such as the drafting of the GPAI Code of Practice.
Computational Design of Active Kinesthetic Garments
Oct 14, 2022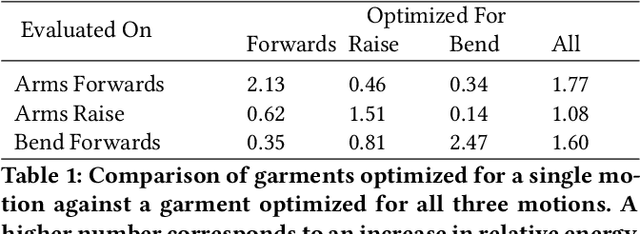
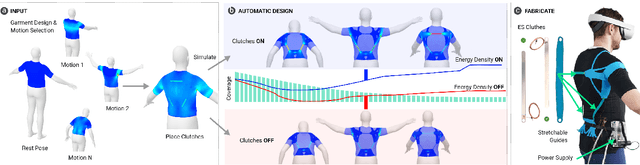
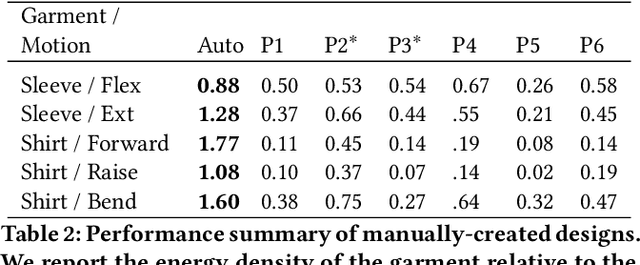
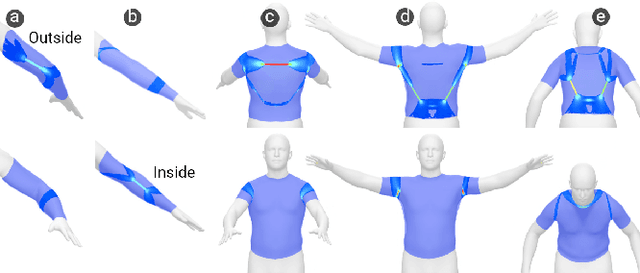
Garments with the ability to provide kinesthetic force-feedback on-demand can augment human capabilities in a non-obtrusive way, enabling numerous applications in VR haptics, motion assistance, and robotic control. However, designing such garments is a complex, and often manual task, particularly when the goal is to resist multiple motions with a single design. In this work, we propose a computational pipeline for designing connecting structures between active components - one of the central challenges in this context. We focus on electrostatic (ES) clutches that are compliant in their passive state while strongly resisting elongation when activated. Our method automatically computes optimized connecting structures that efficiently resist a range of pre-defined body motions on demand. We propose a novel dual-objective optimization approach to simultaneously maximize the resistance to motion when clutches are active, while minimizing resistance when inactive. We demonstrate our method on a set of problems involving different body sites and a range of motions. We further fabricate and evaluate a subset of our automatically created designs against manually created baselines using mechanical testing and in a VR pointing study.