 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussian Garments: Reconstructing Simulation-Ready Clothing with Photorealistic Appearance from Multi-View Video
Sep 12, 2024We introduce Gaussian Garments, a novel approach for reconstructing realistic simulation-ready garment assets from multi-view videos. Our method represents garments with a combination of a 3D mesh and a Gaussian texture that encodes both the color and high-frequency surface details. This representation enables accurate registration of garment geometries to multi-view videos and helps disentangle albedo textures from lighting effects. Furthermore, we demonstrate how a pre-trained graph neural network (GNN) can be fine-tuned to replicate the real behavior of each garment. The reconstructed Gaussian Garments can be automatically combined into multi-garment outfits and animated with the fine-tuned GNN.
ContourCraft: Learning to Resolve Intersections in Neural Multi-Garment Simulations
May 15, 2024Learning-based approaches to cloth simulation have started to show their potential in recent years. However, handling collisions and intersections in neural simulations remains a largely unsolved problem. In this work, we present \moniker{}, a learning-based solution for handling intersections in neural cloth simulations. Unlike conventional approaches that critically rely on intersection-free inputs, \moniker{} robustly recovers from intersections introduced through missed collisions, self-penetrating bodies, or errors in manually designed multi-layer outfits. The technical core of \moniker{} is a novel intersection contour loss that penalizes interpenetrations and encourages rapid resolution thereof. We integrate our intersection loss with a collision-avoiding repulsion objective into a neural cloth simulation method based on graph neural networks (GNNs). We demonstrate our method's ability across a challenging set of diverse multi-layer outfits under dynamic human motions. Our extensive analysis indicates that \moniker{} significantly improves collision handling for learned simulation and produces visually compelling results.
Neural Modes: Self-supervised Learning of Nonlinear Modal Subspaces
Apr 26, 2024We propose a self-supervised approach for learning physics-based subspaces for real-time simulation. Existing learning-based methods construct subspaces by approximating pre-defined simulation data in a purely geometric way. However, this approach tends to produce high-energy configurations, leads to entangled latent space dimensions, and generalizes poorly beyond the training set. To overcome these limitations, we propose a self-supervised approach that directly minimizes the system's mechanical energy during training. We show that our method leads to learned subspaces that reflect physical equilibrium constraints, resolve overfitting issues of previous methods, and offer interpretable latent space parameters.
Neural Metamaterial Networks for Nonlinear Material Design
Sep 15, 2023Nonlinear metamaterials with tailored mechanical properties have applications in engineering, medicine, robotics, and beyond. While modeling their macromechanical behavior is challenging in itself, finding structure parameters that lead to ideal approximation of high-level performance goals is a challenging task. In this work, we propose Neural Metamaterial Networks (NMN) -- smooth neural representations that encode the nonlinear mechanics of entire metamaterial families. Given structure parameters as input, NMN return continuously differentiable strain energy density functions, thus guaranteeing conservative forces by construction. Though trained on simulation data, NMN do not inherit the discontinuities resulting from topological changes in finite element meshes. They instead provide a smooth map from parameter to performance space that is fully differentiable and thus well-suited for gradient-based optimization. On this basis, we formulate inverse material design as a nonlinear programming problem that leverages neural networks for both objective functions and constraints. We use this approach to automatically design materials with desired strain-stress curves, prescribed directional stiffness and Poisson ratio profiles. We furthermore conduct ablation studies on network nonlinearities and show the advantages of our approach compared to native-scale optimization.
HOOD: Hierarchical Graphs for Generalized Modelling of Clothing Dynamics
Dec 14, 2022We propose a method that leverages graph neural networks, multi-level message passing, and unsupervised training to enable real-time prediction of realistic clothing dynamics. Whereas existing methods based on linear blend skinning must be trained for specific garments, our method is agnostic to body shape and applies to tight-fitting garments as well as loose, free-flowing clothing. Our method furthermore handles changes in topology (e.g., garments with buttons or zippers) and material properties at inference time. As one key contribution, we propose a hierarchical message-passing scheme that efficiently propagates stiff stretching modes while preserving local detail. We empirically show that our method outperforms strong baselines quantitatively and that its results are perceived as more realistic than state-of-the-art methods.
Computational Design of Active Kinesthetic Garments
Oct 14, 2022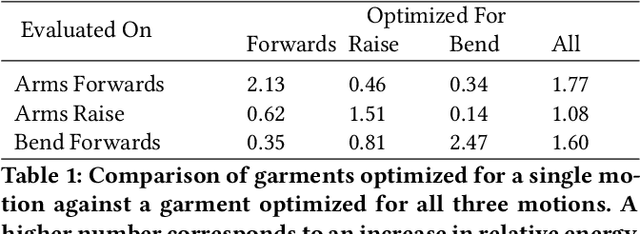
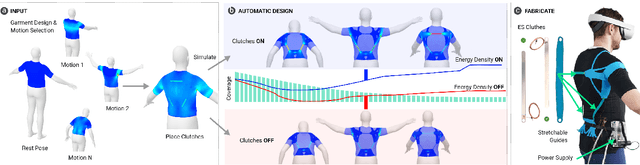
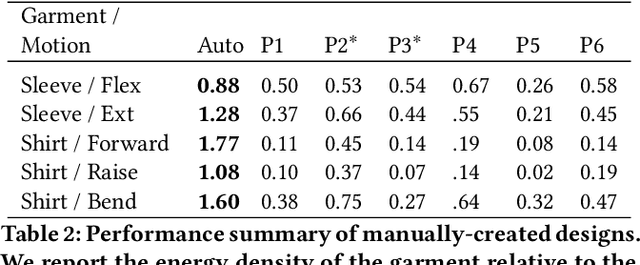
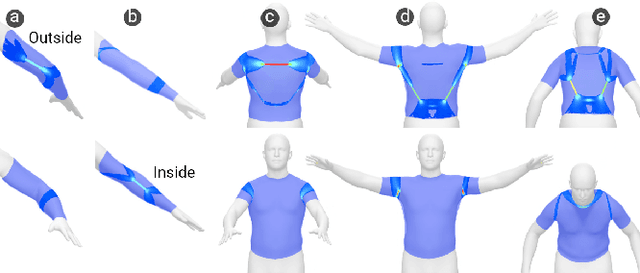
Garments with the ability to provide kinesthetic force-feedback on-demand can augment human capabilities in a non-obtrusive way, enabling numerous applications in VR haptics, motion assistance, and robotic control. However, designing such garments is a complex, and often manual task, particularly when the goal is to resist multiple motions with a single design. In this work, we propose a computational pipeline for designing connecting structures between active components - one of the central challenges in this context. We focus on electrostatic (ES) clutches that are compliant in their passive state while strongly resisting elongation when activated. Our method automatically computes optimized connecting structures that efficiently resist a range of pre-defined body motions on demand. We propose a novel dual-objective optimization approach to simultaneously maximize the resistance to motion when clutches are active, while minimizing resistance when inactive. We demonstrate our method on a set of problems involving different body sites and a range of motions. We further fabricate and evaluate a subset of our automatically created designs against manually created baselines using mechanical testing and in a VR pointing study.
NTopo: Mesh-free Topology Optimization using Implicit Neural Representations
Feb 22, 2021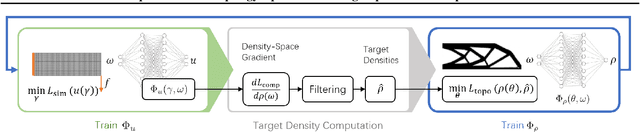
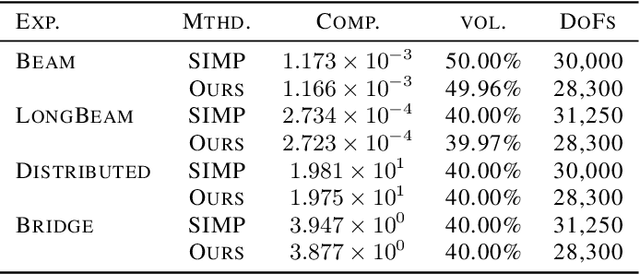
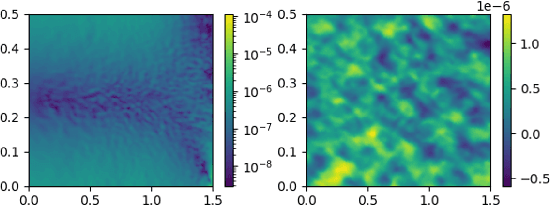
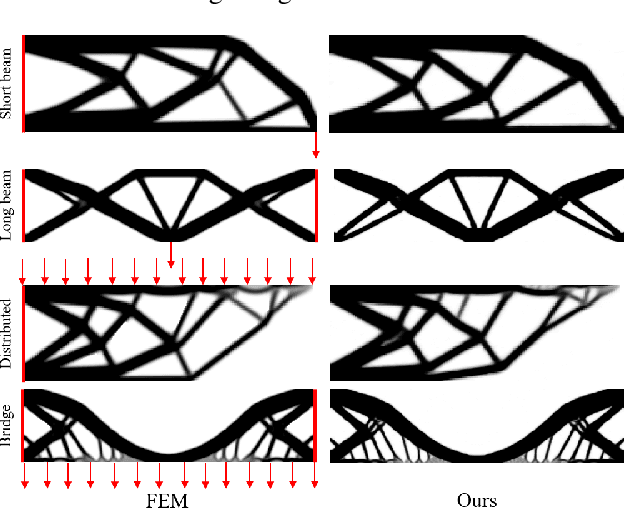
Recent advances in implicit neural representations show great promise when it comes to generating numerical solutions to partial differential equations (PDEs). Compared to conventional alternatives, such representations employ parameterized neural networks to define, in a mesh-free manner, signals that are highly-detailed, continuous, and fully differentiable. Most prior works aim to exploit these benefits in order to solve PDE-governed forward problems, or associated inverse problems that are defined by a small number of parameters. In this work, we present a novel machine learning approach to tackle topology optimization (TO) problems. Topology optimization refers to an important class of inverse problems that typically feature very high-dimensional parameter spaces and objective landscapes which are highly non-linear. To effectively leverage neural representations in the context of TO problems, we use multilayer perceptrons (MLPs) to parameterize both density and displacement fields. Using sensitivity analysis with a moving mean squared error, we show that our formulation can be used to efficiently minimize traditional structural compliance objectives. As we show through our experiments, a major benefit of our approach is that it enables self-supervised learning of continuous solution spaces to topology optimization problems.
Deep Physics-aware Inference of Cloth Deformation for Monocular Human Performance Capture
Nov 25, 2020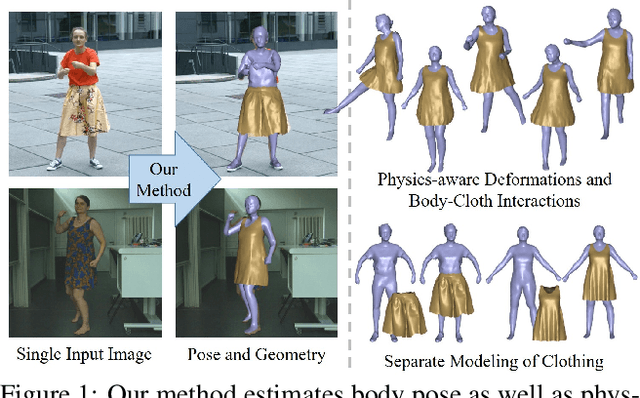


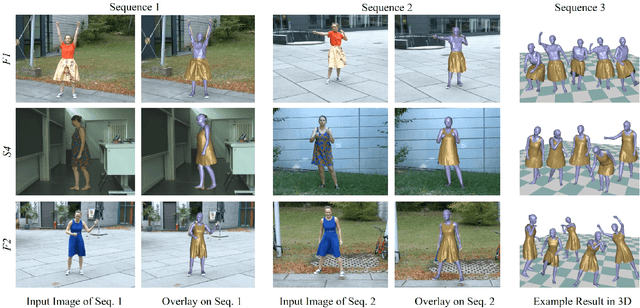
Recent monocular human performance capture approaches have shown compelling dense tracking results of the full body from a single RGB camera. However, existing methods either do not estimate clothing at all or model cloth deformation with simple geometric priors instead of taking into account the underlying physical principles. This leads to noticeable artifacts in their reconstructions, such as baked-in wrinkles, implausible deformations that seemingly defy gravity, and intersections between cloth and body. To address these problems, we propose a person-specific, learning-based method that integrates a finite element-based simulation layer into the training process to provide for the first time physics supervision in the context of weakly-supervised deep monocular human performance capture. We show how integrating physics into the training process improves the learned cloth deformations, allows modeling clothing as a separate piece of geometry, and largely reduces cloth-body intersections. Relying only on weak 2D multi-view supervision during training, our approach leads to a significant improvement over current state-of-the-art methods and is thus a clear step towards realistic monocular capture of the entire deforming surface of a clothed human.
ADD: Analytically Differentiable Dynamics for Multi-Body Systems with Frictional Contact
Jul 02, 2020

We present a differentiable dynamics solver that is able to handle frictional contact for rigid and deformable objects within a unified framework. Through a principled mollification of normal and tangential contact forces, our method circumvents the main difficulties inherent to the non-smooth nature of frictional contact. We combine this new contact model with fully-implicit time integration to obtain a robust and efficient dynamics solver that is analytically differentiable. In conjunction with adjoint sensitivity analysis, our formulation enables gradient-based optimization with adaptive trade-offs between simulation accuracy and smoothness of objective function landscapes. We thoroughly analyse our approach on a set of simulation examples involving rigid bodies, visco-elastic materials, and coupled multi-body systems. We furthermore showcase applications of our differentiable simulator to parameter estimation for deformable objects, motion planning for robotic manipulation, trajectory optimization for compliant walking robots, as well as efficient self-supervised learning of control policies.