 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputational Design of Active Kinesthetic Garments
Paper and Code
Oct 14, 2022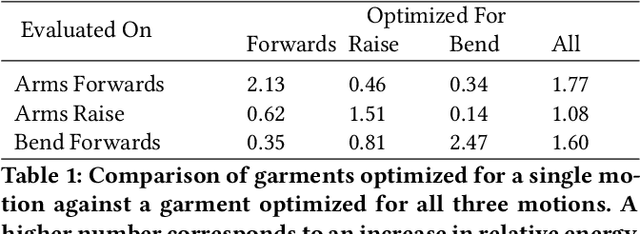
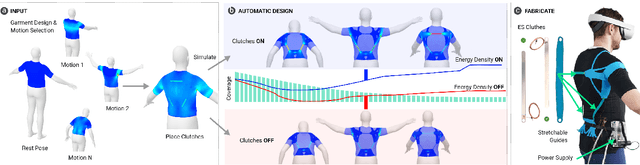
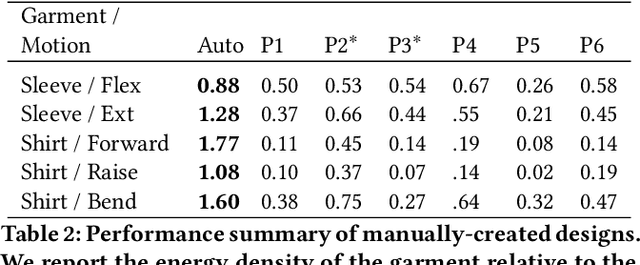
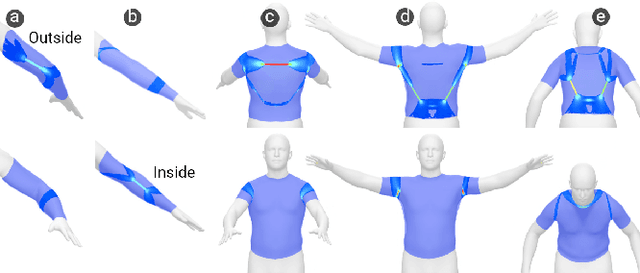
Garments with the ability to provide kinesthetic force-feedback on-demand can augment human capabilities in a non-obtrusive way, enabling numerous applications in VR haptics, motion assistance, and robotic control. However, designing such garments is a complex, and often manual task, particularly when the goal is to resist multiple motions with a single design. In this work, we propose a computational pipeline for designing connecting structures between active components - one of the central challenges in this context. We focus on electrostatic (ES) clutches that are compliant in their passive state while strongly resisting elongation when activated. Our method automatically computes optimized connecting structures that efficiently resist a range of pre-defined body motions on demand. We propose a novel dual-objective optimization approach to simultaneously maximize the resistance to motion when clutches are active, while minimizing resistance when inactive. We demonstrate our method on a set of problems involving different body sites and a range of motions. We further fabricate and evaluate a subset of our automatically created designs against manually created baselines using mechanical testing and in a VR pointing study.