 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInverse designing metamaterials with programmable nonlinear functional responses in graph space
Aug 12, 2024



Material responses to static and dynamic stimuli, represented as nonlinear curves, are design targets for engineering functionalities like structural support, impact protection, and acoustic and photonic bandgaps. Three-dimensional metamaterials offer significant tunability due to their internal structure, yet existing methods struggle to capture their complex behavior-to-structure relationships. We present GraphMetaMat, a graph-based framework capable of designing three-dimensional metamaterials with programmable responses and arbitrary manufacturing constraints. Integrating graph networks, physics biases, reinforcement learning, and tree search, GraphMetaMat can target stress-strain curves spanning four orders of magnitude and complex behaviors, as well as viscoelastic transmission responses with varying attenuation gaps. GraphMetaMat can create cushioning materials for protective equipment and vibration-damping panels for electric vehicles, outperforming commercial materials, and enabling the automatic design of materials with on-demand functionalities.
ADD: Analytically Differentiable Dynamics for Multi-Body Systems with Frictional Contact
Jul 02, 2020
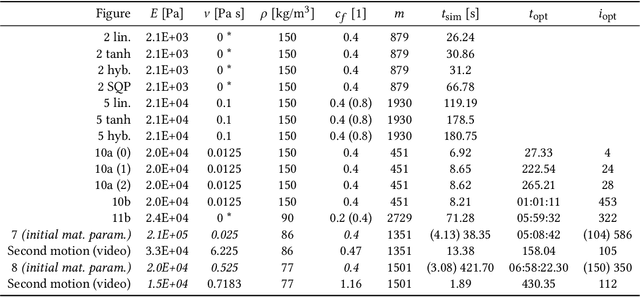
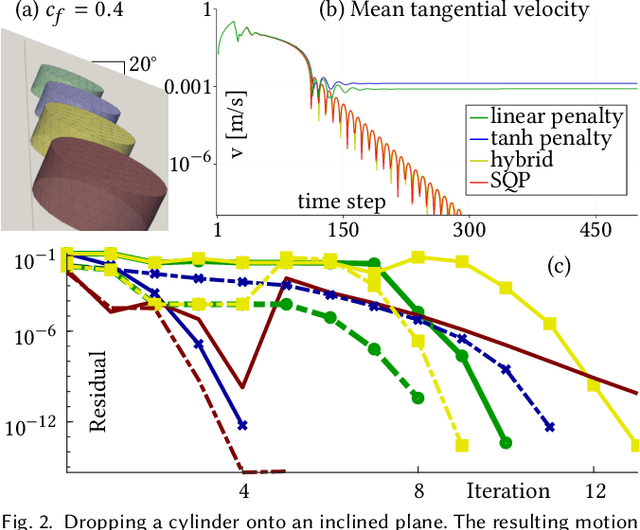

We present a differentiable dynamics solver that is able to handle frictional contact for rigid and deformable objects within a unified framework. Through a principled mollification of normal and tangential contact forces, our method circumvents the main difficulties inherent to the non-smooth nature of frictional contact. We combine this new contact model with fully-implicit time integration to obtain a robust and efficient dynamics solver that is analytically differentiable. In conjunction with adjoint sensitivity analysis, our formulation enables gradient-based optimization with adaptive trade-offs between simulation accuracy and smoothness of objective function landscapes. We thoroughly analyse our approach on a set of simulation examples involving rigid bodies, visco-elastic materials, and coupled multi-body systems. We furthermore showcase applications of our differentiable simulator to parameter estimation for deformable objects, motion planning for robotic manipulation, trajectory optimization for compliant walking robots, as well as efficient self-supervised learning of control policies.