 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgemimic-one: a Scalable Model Recipe for General Purpose Robot Dexterity
Jun 13, 2025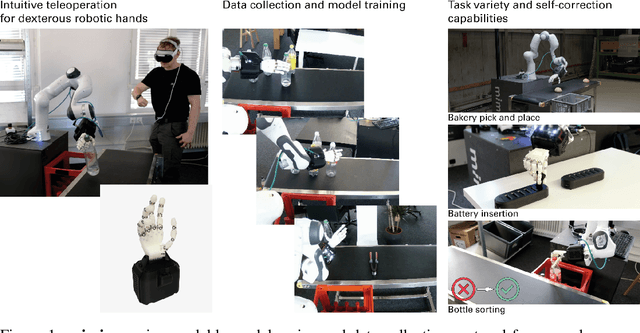
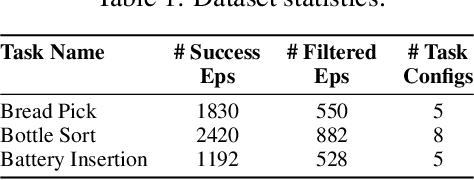

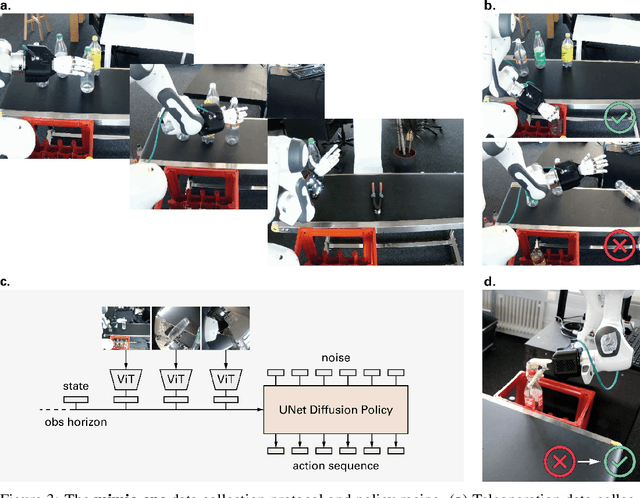
We present a diffusion-based model recipe for real-world control of a highly dexterous humanoid robotic hand, designed for sample-efficient learning and smooth fine-motor action inference. Our system features a newly designed 16-DoF tendon-driven hand, equipped with wide angle wrist cameras and mounted on a Franka Emika Panda arm. We develop a versatile teleoperation pipeline and data collection protocol using both glove-based and VR interfaces, enabling high-quality data collection across diverse tasks such as pick and place, item sorting and assembly insertion. Leveraging high-frequency generative control, we train end-to-end policies from raw sensory inputs, enabling smooth, self-correcting motions in complex manipulation scenarios. Real-world evaluations demonstrate up to 93.3% out of distribution success rates, with up to a +33.3% performance boost due to emergent self-correcting behaviors, while also revealing scaling trends in policy performance. Our results advance the state-of-the-art in dexterous robotic manipulation through a fully integrated, practical approach to hardware, learning, and real-world deployment.
Low Voltage Electrohydraulic Actuators for Untethered Robotics
Jun 01, 2023Rigid robots can be precise in repetitive tasks but struggle in unstructured environments. Nature's versatility in such environments inspires researchers to develop biomimetic robots that incorporate compliant and contracting artificial muscles. Among the recently proposed artificial muscle technologies, electrohydraulic actuators are promising since they offer comparable performance to mammalian muscles in terms of speed and power density. However, they require high driving voltages and have safety concerns due to exposed electrodes. These high voltages lead to either bulky or inefficient driving electronics that make untethered, high-degree-of-freedom bio-inspired robots difficult to realize. Here, we present low voltage electrohydraulic actuators (LEAs) that match mammalian skeletal muscles in average power density (50.5 W/kg) and peak strain rate (971 percent/s) at a driving voltage of just 1100 V. This driving voltage is approx. 5 - 7 times lower compared to other electrohydraulic actuators using paraelectric dielectrics. Furthermore, LEAs are safe to touch, waterproof, and self-clearing, which makes them easy to implement in wearables and robotics. We characterize, model, and physically validate key performance metrics of the actuator and compare its performance to state-of-the-art electrohydraulic designs. Finally, we demonstrate the utility of our actuators on two muscle-based electrohydraulic robots: an untethered soft robotic swimmer and a robotic gripper. We foresee that LEAs can become a key building block for future highly-biomimetic untethered robots and wearables with many independent artificial muscles such as biomimetic hands, faces, or exoskeletons.
Planar Modeling and Sim-to-Real of a Tethered Multimaterial Soft Swimmer Driven by Peano-HASELs
Aug 02, 2022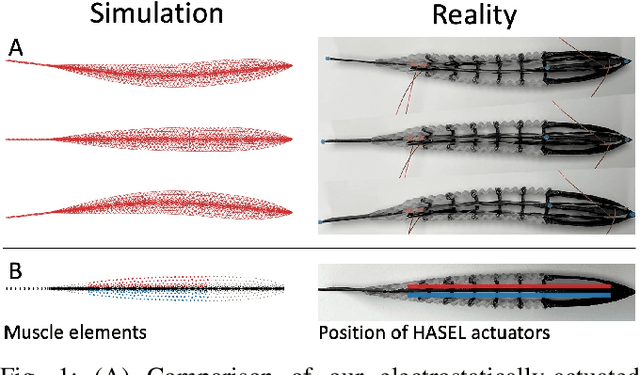
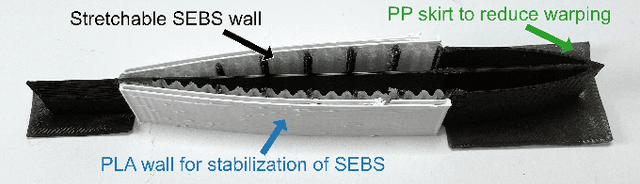
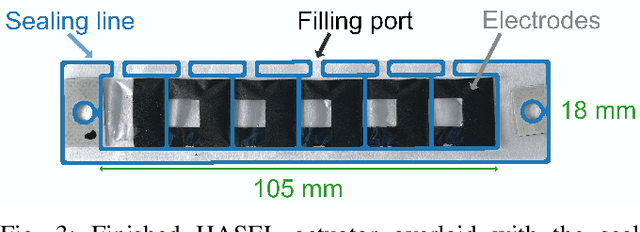
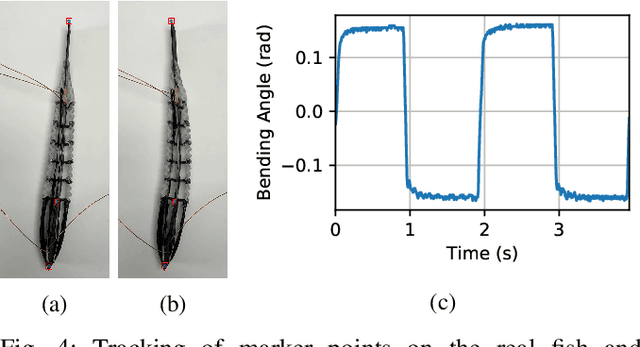
Soft robotics has the potential to revolutionize robotic locomotion, in particular, soft robotic swimmers offer a minimally invasive and adaptive solution to explore and preserve our oceans. Unfortunately, current soft robotic swimmers are vastly inferior to evolved biological swimmers, especially in terms of controllability, efficiency, maneuverability, and longevity. Additionally, the tedious iterative fabrication and empirical testing required to design soft robots has hindered their optimization. In this work, we tackle this challenge by providing an efficient and straightforward pipeline for designing and fabricating soft robotic swimmers equipped with electrostatic actuation. We streamline the process to allow for rapid additive manufacturing, and show how a differentiable simulation can be used to match a simplified model to the real deformation of a robotic swimmer. We perform several experiments with the fabricated swimmer by varying the voltage and actuation frequency of the swimmer's antagonistic muscles. We show how the voltage and frequency vary the locomotion speed of the swimmer while moving in liquid oil and observe a clear optimum in forward swimming speed. The differentiable simulation model we propose has various downstream applications, such as control and shape optimization of the swimmer; optimization results can be directly mapped back to the real robot through our sim-to-real matching.
Flying Hydraulically Amplified Electrostatic Gripper System for Aerial Object Manipulation
May 25, 2022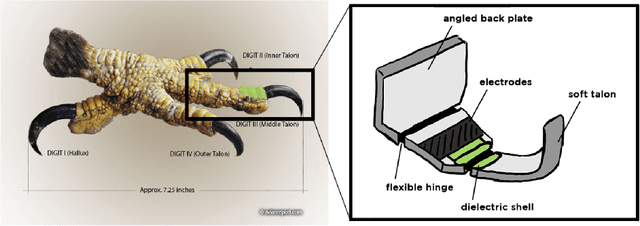
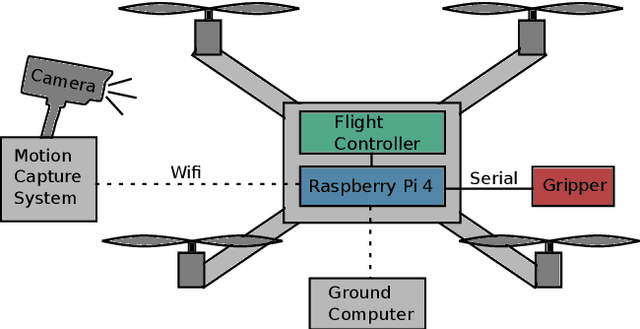
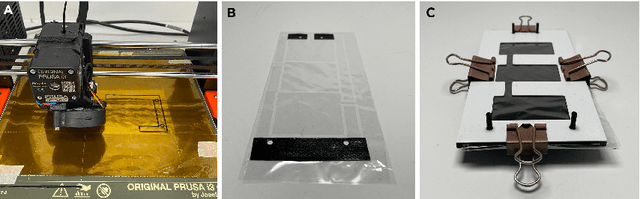
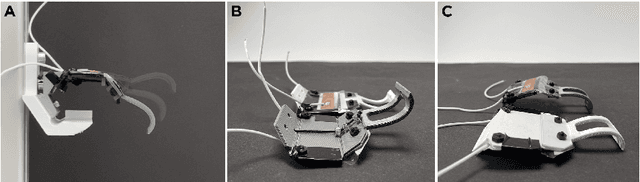
Rapid and versatile object manipulation in air is an open challenge. An energy-efficient and adaptive soft gripper combined with an agile aerial vehicle could revolutionize aerial robotic manipulation in areas such as warehousing. This paper presents a bio-inspired gripper powered by hydraulically amplified electrostatic actuators mounted to a quadcopter that can interact safely and naturally with its environment. Our gripping concept is motivated by an eagle's talon. Our custom multi-actuator type is inspired by a previous scorpion tail design (consisting of a base electrode and pouches stacked adjacently) and spider-inspired joints (classic pouch motors with a flexible hinge layer). A fusion of these two concepts realizes a higher force output than single-actuator types under considerable deflections of up to 25{\deg}. By adding a sandwich hinge layer structure to the classic pouch motor concept we improve the overall robustness of the gripper. We show, for the first time, that soft manipulation in air is possible using electrostatic actuation. This study demonstrates the high potential of untethered hydraulically amplified actuators for the future of robotic manipulation. Our lightweight and bio-inspired system opens up the use of hydraulic electrostatic actuators in aerial mobile systems.