 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Robust Dexterous In-Hand Manipulation from Joint Sensors with Proprioceptive Transformer
May 20, 2026In-hand object manipulation is a fundamental yet challenging capability for dexterous robots. Despite significant progress in dexterous manipulation, existing approaches rely heavily on vision or tactile sensing to track object states, while joint sensing -- the most readily available modality on any robotic hand -- remains largely overlooked, particularly for tendon-driven hands. In this paper, we study how far joint sensing alone can go by asking: (i) whether motor encoders or direct joint sensing provides better proprioceptive feedback, (ii) how to extract environment information from joint measurements, and (iii) whether joint-only control can achieve competitive real-world performance without external perception. We present the Proprioceptive Transformer (PT), an exteroceptive-free approach for continuous cube rotation on a tendon-driven dexterous hand that uses only joint sensing feedback. A teacher policy is first trained via reinforcement learning with privileged object information, then distilled into PT, which operates solely on joint position and velocity histories. The Transformer architecture effectively extracts implicit object state information from temporal patterns in joint sensor readings. Experiments on the real ORCA hand show that our approach achieves 3.1x higher rotation speed than baselines. We also demonstrate that our PT achieves a 23.4% lower RMSE for cube position estimation than the MLP baseline, indicating superior extraction of exteroceptive information from proprioceptive sources.
A Benchmark of Dexterity for Anthropomorphic Robotic Hands
Apr 10, 2026Dexterity is a central yet ambiguously defined concept in the design and evaluation of anthropomorphic robotic hands. In practice, the term is often used inconsistently, with different systems evaluated under disparate criteria, making meaningful comparisons across designs difficult. This highlights the need for a unified, performance-based definition of dexterity grounded in measurable outcomes rather than proxy metrics. In this work, we introduce POMDAR, a comprehensive dexterity benchmark that formalizes dexterity as task performance across a structured set of manipulation and grasping motions. The benchmark was systematically derived from established taxonomies in human motor control. It is implemented in both real-world and simulation and includes four manipulation configurations: vertical and horizontal configurations, continuous rotation, and pure grasping. The task designs contain mechanical scaffolding to constrain task motion, suppress compensatory strategies, and enable metrics to be measured unambiguously. We define a quantitative scoring metric combining task correctness and execution speed, effectively measuring dexterity as throughput. This enables objective, reproducible, and interpretable evaluation across different hand designs. POMDAR provides an open-source, standardized, and taxonomy-grounded benchmark for consistent comparison and evaluation of anthropomorphic robot hands to facilitate a systematic advancement of dexterous manipulation platforms. CAD, simulation files, and evaluation videos are publicly available at https://srl-ethz.github.io/POMDAR/.
A Sensorless, Inherently Compliant Anthropomorphic Musculoskeletal Hand Driven by Electrohydraulic Actuators
Mar 25, 2026Robotic manipulation in unstructured environments requires end-effectors that combine high kinematic dexterity with physical compliance. While traditional rigid hands rely on complex external sensors for safe interaction, electrohydraulic actuators offer a promising alternative. This paper presents the design, control, and evaluation of a novel musculoskeletal robotic hand architecture powered entirely by remote Peano-HASEL actuators, specifically optimized for safe manipulation. By relocating the actuators to the forearm, we functionally isolate the grasping interface from electrical hazards while maintaining a slim, human-like profile. To address the inherently limited linear contraction of these soft actuators, we integrate a 1:2 pulley routing mechanism that mechanically amplifies tendon displacement. The resulting system prioritizes compliant interaction over high payload capacity, leveraging the intrinsic force-limiting characteristics of the actuators to provide a high level of inherent safety. Furthermore, this physical safety is augmented by the self-sensing nature of the HASEL actuators. By simply monitoring the operating current, we achieve real-time grasp detection and closed-loop contact-aware control without relying on external force transducers or encoders. Experimental results validate the system's dexterity and inherent safety, demonstrating the successful execution of various grasp taxonomies and the non-destructive grasping of highly fragile objects, such as a paper balloon. These findings highlight a significant step toward simplified, inherently compliant soft robotic manipulation.
Learning Actuator-Aware Spectral Submanifolds for Precise Control of Continuum Robots
Mar 24, 2026Continuum robots exhibit high-dimensional, nonlinear dynamics which are often coupled with their actuation mechanism. Spectral submanifold (SSM) reduction has emerged as a leading method for reducing high-dimensional nonlinear dynamical systems to low-dimensional invariant manifolds. Our proposed control-augmented SSMs (caSSMs) extend this methodology by explicitly incorporating control inputs into the state representation, enabling these models to capture nonlinear state-input couplings. Training these models relies solely on controlled decay trajectories of the actuator-augmented state, thereby removing the additional actuation-calibration step commonly needed by prior SSM-for-control methods. We learn a compact caSSM model for a tendon-driven trunk robot, enabling real-time control and reducing open-loop prediction error by 40% compared to existing methods. In closed-loop experiments with model predictive control (MPC), caSSM reduces tracking error by 52%, demonstrating improved performance against Koopman and SSM based MPC and practical deployability on hardware continuum robots.
Simple Models, Real Swimming: Digital Twins for Tendon-Driven Underwater Robots
Feb 26, 2026Mimicking the graceful motion of swimming animals remains a core challenge in soft robotics due to the complexity of fluid-structure interaction and the difficulty of controlling soft, biomimetic bodies. Existing modeling approaches are often computationally expensive and impractical for complex control or reinforcement learning needed for realistic motions to emerge in robotic systems. In this work, we present a tendon-driven fish robot modeled in an efficient underwater swimmer environment using a simplified, stateless hydrodynamics formulation implemented in the widespread robotics framework MuJoCo. With just two real-world swimming trajectories, we identify five fluid parameters that allow a matching to experimental behavior and generalize across a range of actuation frequencies. We show that this stateless fluid model can generalize to unseen actuation and outperform classical analytical models such as the elongated body theory. This simulation environment runs faster than real-time and can easily enable downstream learning algorithms such as reinforcement learning for target tracking, reaching a 93% success rate. Due to the simplicity and ease of use of the model and our open-source simulation environment, our results show that even simple, stateless models -- when carefully matched to physical data -- can serve as effective digital twins for soft underwater robots, opening up new directions for scalable learning and control in aquatic environments.
Sample-Efficient Real-World Dexterous Policy Fine-Tuning via Action-Chunked Critics and Normalizing Flows
Feb 10, 2026Real-world fine-tuning of dexterous manipulation policies remains challenging due to limited real-world interaction budgets and highly multimodal action distributions. Diffusion-based policies, while expressive, do not permit conservative likelihood-based updates during fine-tuning because action probabilities are intractable. In contrast, conventional Gaussian policies collapse under multimodality, particularly when actions are executed in chunks, and standard per-step critics fail to align with chunked execution, leading to poor credit assignment. We present SOFT-FLOW, a sample-efficient off-policy fine-tuning framework with normalizing flow (NF) to address these challenges. The normalizing flow policy yields exact likelihoods for multimodal action chunks, allowing conservative, stable policy updates through likelihood regularization and thereby improving sample efficiency. An action-chunked critic evaluates entire action sequences, aligning value estimation with the policy's temporal structure and improving long-horizon credit assignment. To our knowledge, this is the first demonstration of a likelihood-based, multimodal generative policy combined with chunk-level value learning on real robotic hardware. We evaluate SOFT-FLOW on two challenging dexterous manipulation tasks in the real world: cutting tape with scissors retrieved from a case, and in-hand cube rotation with a palm-down grasp -- both of which require precise, dexterous control over long horizons. On these tasks, SOFT-FLOW achieves stable, sample-efficient adaptation where standard methods struggle.
Nonlinear Spectral Modeling and Control of Soft-Robotic Muscles from Data
Jan 06, 2026Artificial muscles are essential for compliant musculoskeletal robotics but complicate control due to nonlinear multiphysics dynamics. Hydraulically amplified electrostatic (HASEL) actuators, a class of soft artificial muscles, offer high performance but exhibit memory effects and hysteresis. Here we present a data-driven reduction and control strategy grounded in spectral submanifold (SSM) theory. In the adiabatic regime, where inputs vary slowly relative to intrinsic transients, trajectories rapidly converge to a low-dimensional slow manifold. We learn an explicit input-to-output map on this manifold from forced-response trajectories alone, avoiding decay experiments that can trigger hysteresis. We deploy the SSM-based model for real-time control of an antagonistic HASEL-clutch joint. This approach yields a substantial reduction in tracking error compared to feedback-only and feedforward-only baselines under identical settings. This record-and-control workflow enables rapid characterization and high-performance control of soft muscles and muscle-driven joints without detailed physics-based modeling.
SORS: A Modular, High-Fidelity Simulator for Soft Robots
Dec 17, 2025The deployment of complex soft robots in multiphysics environments requires advanced simulation frameworks that not only capture interactions between different types of material, but also translate accurately to real-world performance. Soft robots pose unique modeling challenges due to their large nonlinear deformations, material incompressibility, and contact interactions, which complicate both numerical stability and physical accuracy. Despite recent progress, robotic simulators often struggle with modeling such phenomena in a scalable and application-relevant manner. We present SORS (Soft Over Rigid Simulator), a versatile, high-fidelity simulator designed to handle these complexities for soft robot applications. Our energy-based framework, built on the finite element method, allows modular extensions, enabling the inclusion of custom-designed material and actuation models. To ensure physically consistent contact handling, we integrate a constrained nonlinear optimization based on sequential quadratic programming, allowing for stable and accurate modeling of contact phenomena. We validate our simulator through a diverse set of real-world experiments, which include cantilever deflection, pressure-actuation of a soft robotic arm, and contact interactions from the PokeFlex dataset. In addition, we showcase the potential of our framework for control optimization of a soft robotic leg. These tests confirm that our simulator can capture both fundamental material behavior and complex actuation dynamics with high physical fidelity. By bridging the sim-to-real gap in these challenging domains, our approach provides a validated tool for prototyping next-generation soft robots, filling the gap of extensibility, fidelity, and usability in the soft robotic ecosystem.
Decoupling Torque and Stiffness: A Unified Modeling and Control Framework for Antagonistic Artificial Muscles
Nov 13, 2025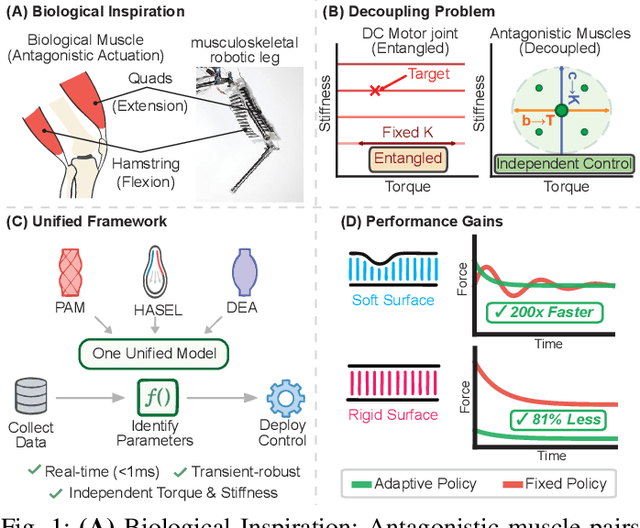

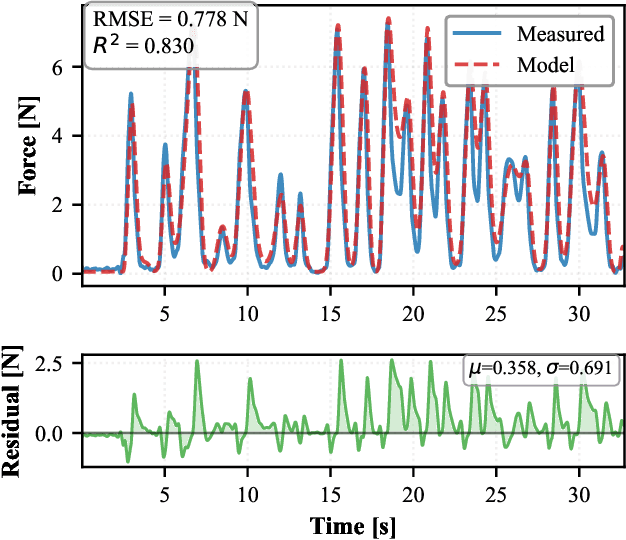
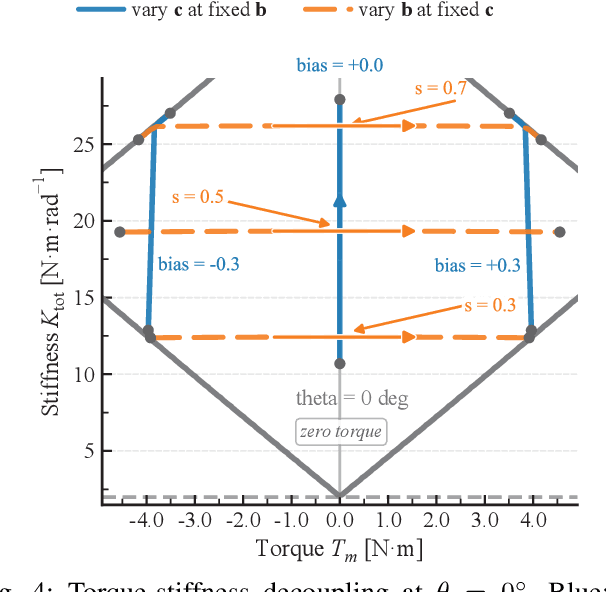
Antagonistic soft actuators built from artificial muscles (PAMs, HASELs, DEAs) promise plant-level torque-stiffness decoupling, yet existing controllers for soft muscles struggle to maintain independent control through dynamic contact transients. We present a unified framework enabling independent torque and stiffness commands in real-time for diverse soft actuator types. Our unified force law captures diverse soft muscle physics in a single model with sub-ms computation, while our cascaded controller with analytical inverse dynamics maintains decoupling despite model errors and disturbances. Using co-contraction/bias coordinates, the controller independently modulates torque via bias and stiffness via co-contraction-replicating biological impedance strategies. Simulation-based validation through contact experiments demonstrates maintained independence: 200x faster settling on soft surfaces, 81% force reduction on rigid surfaces, and stable interaction vs 22-54% stability for fixed policies. This framework provides a foundation for enabling musculoskeletal antagonistic systems to execute adaptive impedance control for safe human-robot interaction.
Learning Soft Robotic Dynamics with Active Exploration
Oct 31, 2025Soft robots offer unmatched adaptability and safety in unstructured environments, yet their compliant, high-dimensional, and nonlinear dynamics make modeling for control notoriously difficult. Existing data-driven approaches often fail to generalize, constrained by narrowly focused task demonstrations or inefficient random exploration. We introduce SoftAE, an uncertainty-aware active exploration framework that autonomously learns task-agnostic and generalizable dynamics models of soft robotic systems. SoftAE employs probabilistic ensemble models to estimate epistemic uncertainty and actively guides exploration toward underrepresented regions of the state-action space, achieving efficient coverage of diverse behaviors without task-specific supervision. We evaluate SoftAE on three simulated soft robotic platforms -- a continuum arm, an articulated fish in fluid, and a musculoskeletal leg with hybrid actuation -- and on a pneumatically actuated continuum soft arm in the real world. Compared with random exploration and task-specific model-based reinforcement learning, SoftAE produces more accurate dynamics models, enables superior zero-shot control on unseen tasks, and maintains robustness under sensing noise, actuation delays, and nonlinear material effects. These results demonstrate that uncertainty-driven active exploration can yield scalable, reusable dynamics models across diverse soft robotic morphologies, representing a step toward more autonomous, adaptable, and data-efficient control in compliant robots.