 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-Based Capacitive Touch Sensing in Soft Robotics: Achieving Robust Tactile Interactions for Artistic Applications
Mar 04, 2025In this paper, we present a touch technology to achieve tactile interactivity for human-robot interaction (HRI) in soft robotics. By combining a capacitive touch sensor with an online solid mechanics simulation provided by the SOFA framework, contact detection is achieved for arbitrary shapes. Furthermore, the implementation of the capacitive touch technology presented here is selectively sensitive to human touch (conductive objects), while it is largely unaffected by the deformations created by the pneumatic actuation of our soft robot. Multi-touch interactions are also possible. We evaluated our approach with an organic soft robotics sculpture that was created by a visual artist. In particular, we evaluate that the touch localization capabilities are robust under the deformation of the device. We discuss the potential this approach has for the arts and entertainment as well as other domains.
* 8 pages, 17 figures. Accepted at IEEE Robotics and Automation Letters (RA-L) 2025
Multi-tap Resistive Sensing and FEM Modeling enables Shape and Force Estimation in Soft Robots
Nov 24, 2023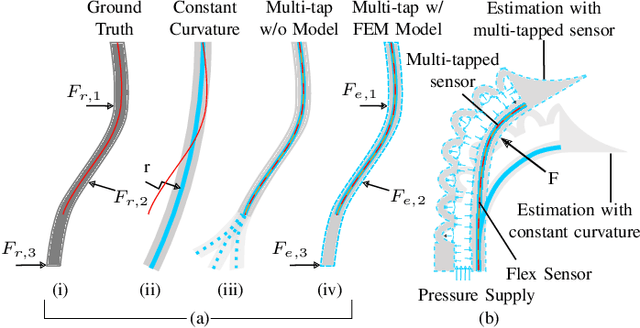



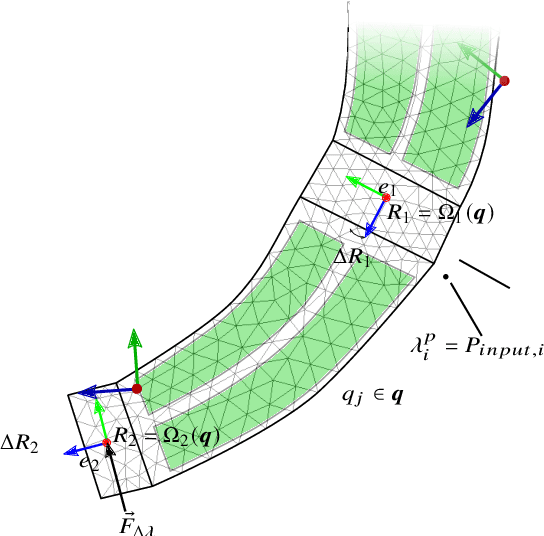
We address the challenge of reliable and accurate proprioception in soft robots, specifically those with tight packaging constraints and relying only on internally embedded sensors. While various sensing approaches with single sensors have been tried, often with a constant curvature assumption, we look into sensing local deformations at multiple locations of the sensor. In our approach, we multi-tap an off-the-shelf resistive sensor by creating multiple electrical connections onto the resistive layer of the sensor and we insert the sensor into a soft body. This modification allows us to measure changes in resistance at multiple segments throughout the length of the sensor, providing improved resolution of local deformations in the soft body. These measurements inform a model based on a finite element method (FEM) that estimates the shape of the soft body and the magnitude of an external force acting at a known arbitrary location. Our model-based approach estimates soft body deformation with approximately 3% average relative error while taking into account internal fluidic actuation. Our estimate of external force disturbance has an 11% relative error within a range of 0 to 5 N. The combined sensing and modeling approach can be integrated, for instance, into soft manipulation platforms to enable features such as identifying the shape and material properties of an object being grasped. Such manipulators can benefit from the inherent softness and compliance while being fully proprioceptive, relying only on embedded sensing and not on external systems such as motion capture. Such proprioception is essential for the deployment of soft robots in real-world scenarios.
An Open Source Design Optimization Toolbox Evaluated on a Soft Finger
Apr 14, 2023



In this paper, we introduce a novel open source toolbox for design optimization in Soft Robotics. We consider that design optimization is an important trend in Soft Robotics that is changing the way in which designs will be shared and adopted. We evaluate this toolbox on the example of a cable-driven, sensorized soft finger. For devices like these, that feature both actuation and sensing, the need for multi-objective optimization capabilities naturally arises, because at the very least, a trade-off between these two aspects has to be found. Thus, multi-objective optimization capability is one of the central features of the proposed toolbox. We evaluate the optimization of the soft finger and show that extreme points of the optimization trade-off between sensing and actuation are indeed far apart on actually fabricated devices for the established metrics. Furthermore, we provide an in depth analysis of the sim-to-real behavior of the example, taking into account factors such as the mesh density in the simulation, mechanical parameters and fabrication tolerances.
Model-Based Disturbance Estimation for a Fiber-Reinforced Soft Manipulator using Orientation Sensing
Jun 23, 2022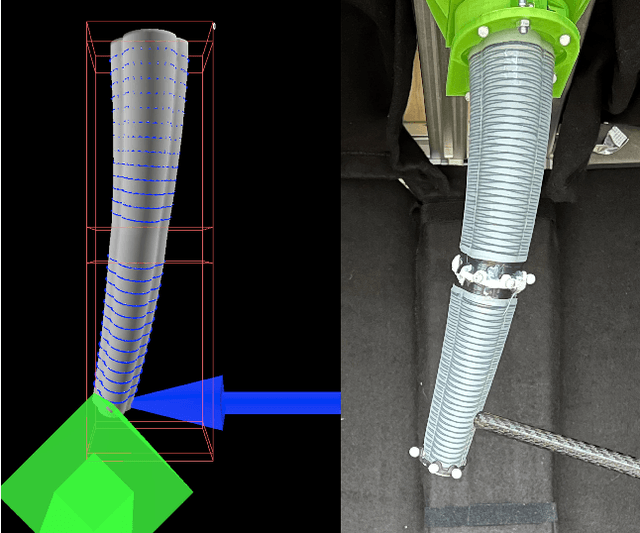
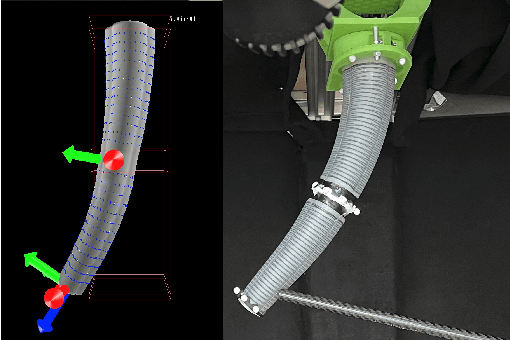
For soft robots to work effectively in human-centered environments, they need to be able to estimate their state and external interactions based on (proprioceptive) sensors. Estimating disturbances allows a soft robot to perform desirable force control. Even in the case of rigid manipulators, force estimation at the end-effector is seen as a non-trivial problem. And indeed, other current approaches to address this challenge have shortcomings that prevent their general application. They are often based on simplified soft dynamic models, such as the ones relying on a piece-wise constant curvature (PCC) approximation or matched rigid-body models that do not represent enough details of the problem. Thus, the applications needed for complex human-robot interaction can not be built. Finite element methods (FEM) allow for predictions of soft robot dynamics in a more generic fashion. Here, using the soft robot modeling capabilities of the framework SOFA, we build a detailed FEM model of a multi-segment soft continuum robotic arm composed of compliant deformable materials and fiber-reinforced pressurized actuation chambers with a model for sensors that provide orientation output. This model is used to establish a state observer for the manipulator. Model parameters were calibrated to match imperfections of the manual fabrication process using physical experiments. We then solve a quadratic programming inverse dynamics problem to compute the components of external force that explain the pose error. Our experiments show an average force estimation error of around 1.2%. As the methods proposed are generic, these results are encouraging for the task of building soft robots exhibiting complex, reactive, sensor-based behavior that can be deployed in human-centered environments.
Proximity Perception in Human-Centered Robotics: A Survey on Sensing Systems and Applications
Aug 17, 2021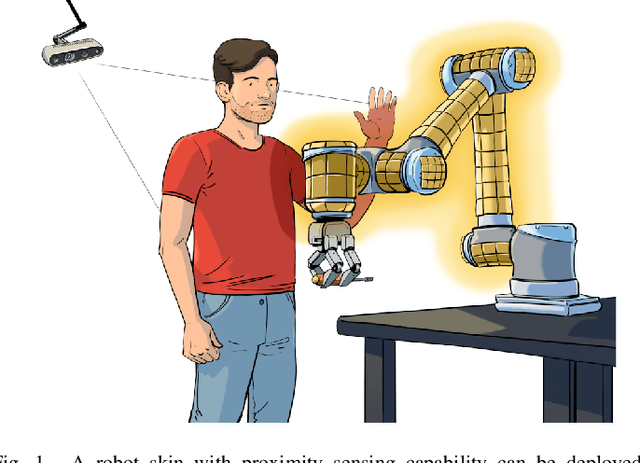

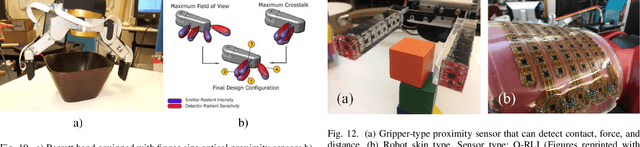

Proximity perception is a technology that has the potential to play an essential role in the future of robotics. It can fulfill the promise of safe, robust, and autonomous systems in industry and everyday life, alongside humans, as well as in remote locations in space and underwater. In this survey paper, we cover the developments of this field from the early days up to the present, with a focus on human-centered robotics. Here, proximity sensors are typically deployed in two scenarios: first, on the exterior of manipulator arms to support safety and interaction functionality, and second, on the inside of grippers or hands to support grasping and exploration. Starting from this observation, we propose a categorization for the approaches found in the literature. To provide a basis for understanding these approaches, we devote effort to present the technologies and different measuring principles that were developed over the years, also providing a summary in form of a table. Then, we show the diversity of applications that have been presented in the literature. Finally, we give an overview of the most important trends that will shape the future of this domain.