 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling, Embedded Control and Design of Soft Robots using a Learned Condensed FEM Model
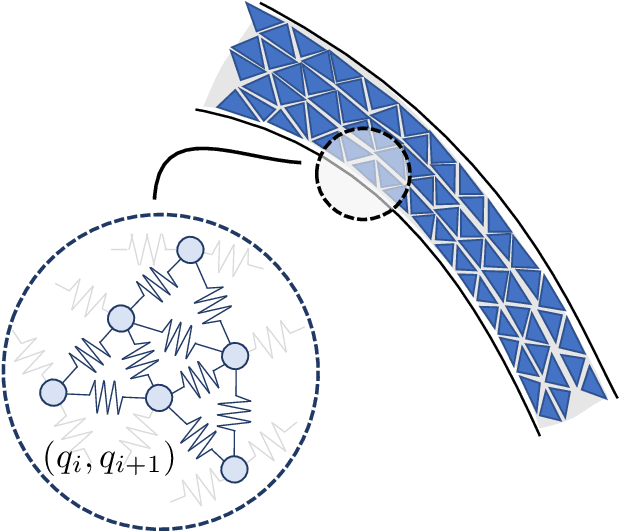
Mar 19, 2025The Finite Element Method (FEM) is a powerful modeling tool for predicting soft robots' behavior, but its computation time can limit practical applications. In this paper, a learning-based approach based on condensation of the FEM model is detailed. The proposed method handles several kinds of actuators and contacts with the environment. We demonstrate that this compact model can be learned as a unified model across several designs and remains very efficient in terms of modeling since we can deduce the direct and inverse kinematics of the robot. Building upon the intuition introduced in [11], the learned model is presented as a general framework for modeling, controlling, and designing soft manipulators. First, the method's adaptability and versatility are illustrated through optimization based control problems involving positioning and manipulation tasks with mechanical contact-based coupling. Secondly, the low memory consumption and the high prediction speed of the learned condensed model are leveraged for real-time embedding control without relying on costly online FEM simulation. Finally, the ability of the learned condensed FEM model to capture soft robot design variations and its differentiability are leveraged in calibration and design optimization applications.
Learning control strategy in soft robotics through a set of configuration spaces
Feb 21, 2024The ability of a soft robot to perform specific tasks is determined by its contact configuration, and transitioning between configurations is often necessary to reach a desired position or manipulate an object. Based on this observation, we propose a method for controlling soft robots that involves defining a graph of configuration spaces. Different agents, whether learned or not (convex optimization, expert trajectory, and collision detection), use the structure of the graph to solve the desired task. The graph and the agents are part of the prior knowledge that is intuitively integrated into the learning process. They are used to combine different optimization methods, improve sample efficiency, and provide interpretability. We construct the graph based on the contact configurations and demonstrate its effectiveness through two scenarios, a deformable beam in contact with its environment and a soft manipulator, where it outperforms the baseline in terms of stability, learning speed, and interpretability.
Multi-tap Resistive Sensing and FEM Modeling enables Shape and Force Estimation in Soft Robots
Nov 24, 2023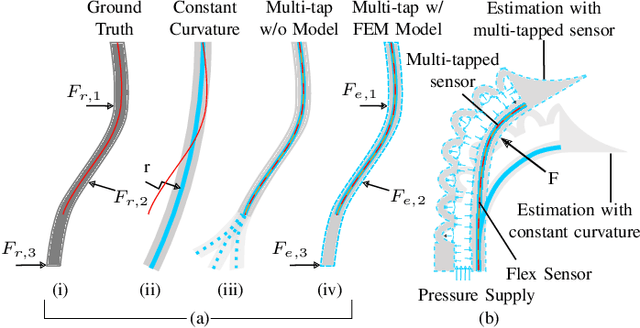



We address the challenge of reliable and accurate proprioception in soft robots, specifically those with tight packaging constraints and relying only on internally embedded sensors. While various sensing approaches with single sensors have been tried, often with a constant curvature assumption, we look into sensing local deformations at multiple locations of the sensor. In our approach, we multi-tap an off-the-shelf resistive sensor by creating multiple electrical connections onto the resistive layer of the sensor and we insert the sensor into a soft body. This modification allows us to measure changes in resistance at multiple segments throughout the length of the sensor, providing improved resolution of local deformations in the soft body. These measurements inform a model based on a finite element method (FEM) that estimates the shape of the soft body and the magnitude of an external force acting at a known arbitrary location. Our model-based approach estimates soft body deformation with approximately 3% average relative error while taking into account internal fluidic actuation. Our estimate of external force disturbance has an 11% relative error within a range of 0 to 5 N. The combined sensing and modeling approach can be integrated, for instance, into soft manipulation platforms to enable features such as identifying the shape and material properties of an object being grasped. Such manipulators can benefit from the inherent softness and compliance while being fully proprioceptive, relying only on embedded sensing and not on external systems such as motion capture. Such proprioception is essential for the deployment of soft robots in real-world scenarios.
Toward the use of proxies for efficient learning manipulation and locomotion strategies on soft robots
Oct 25, 2023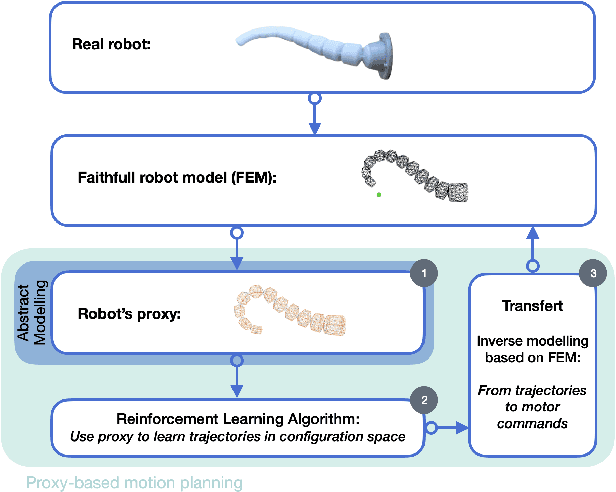
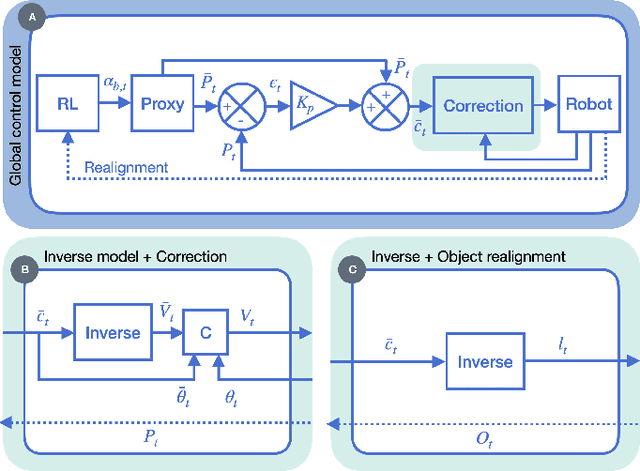
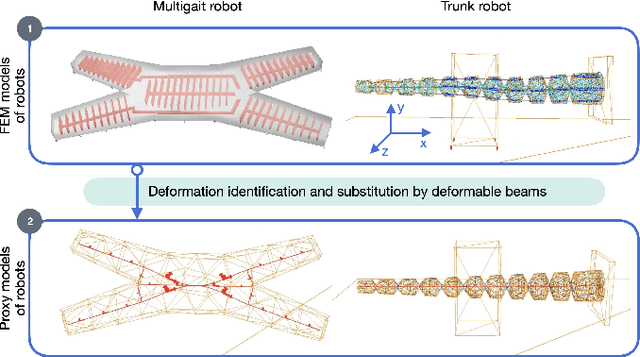
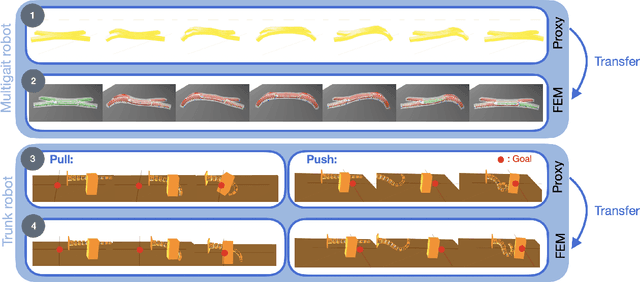
Soft robots are naturally designed to perform safe interactions with their environment, like locomotion and manipulation. In the literature, there are now many concepts, often bio-inspired, to propose new modes of locomotion or grasping. However, a methodology for implementing motion planning of these tasks, as exists for rigid robots, is still lacking. One of the difficulties comes from the modeling of these robots, which is very different, as it is based on the mechanics of deformable bodies. These models, whose dimension is often very large, make learning and optimization methods very costly. In this paper, we propose a proxy approach, as exists for humanoid robotics. This proxy is a simplified model of the robot that enables frugal learning of a motion strategy. This strategy is then transferred to the complete model to obtain the corresponding actuation inputs. Our methodology is illustrated and analyzed on two classical designs of soft robots doing manipulation and locomotion tasks.
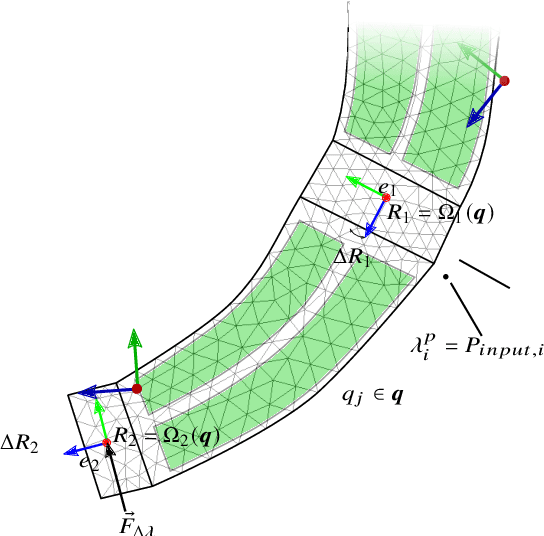
Direct and inverse modeling of soft robots by learning a condensed FEM model
Jul 21, 2023The Finite Element Method (FEM) is a powerful modeling tool for predicting the behavior of soft robots. However, its use for control can be difficult for non-specialists of numerical computation: it requires an optimization of the computation to make it real-time. In this paper, we propose a learning-based approach to obtain a compact but sufficiently rich mechanical representation. Our choice is based on nonlinear compliance data in the actuator/effector space provided by a condensation of the FEM model. We demonstrate that this compact model can be learned with a reasonable amount of data and, at the same time, be very efficient in terms of modeling, since we can deduce the direct and inverse kinematics of the robot. We also show how to couple some models learned individually in particular on an example of a gripper composed of two soft fingers. Other results are shown by comparing the inverse model derived from the full FEM model and the one from the compact learned version. This work opens new perspectives, namely for the embedded control of soft robots, but also for their design. These perspectives are also discussed in the paper.
An Open Source Design Optimization Toolbox Evaluated on a Soft Finger
Apr 14, 2023



In this paper, we introduce a novel open source toolbox for design optimization in Soft Robotics. We consider that design optimization is an important trend in Soft Robotics that is changing the way in which designs will be shared and adopted. We evaluate this toolbox on the example of a cable-driven, sensorized soft finger. For devices like these, that feature both actuation and sensing, the need for multi-objective optimization capabilities naturally arises, because at the very least, a trade-off between these two aspects has to be found. Thus, multi-objective optimization capability is one of the central features of the proposed toolbox. We evaluate the optimization of the soft finger and show that extreme points of the optimization trade-off between sensing and actuation are indeed far apart on actually fabricated devices for the established metrics. Furthermore, we provide an in depth analysis of the sim-to-real behavior of the example, taking into account factors such as the mesh density in the simulation, mechanical parameters and fabrication tolerances.
Model-Based Disturbance Estimation for a Fiber-Reinforced Soft Manipulator using Orientation Sensing
Jun 23, 2022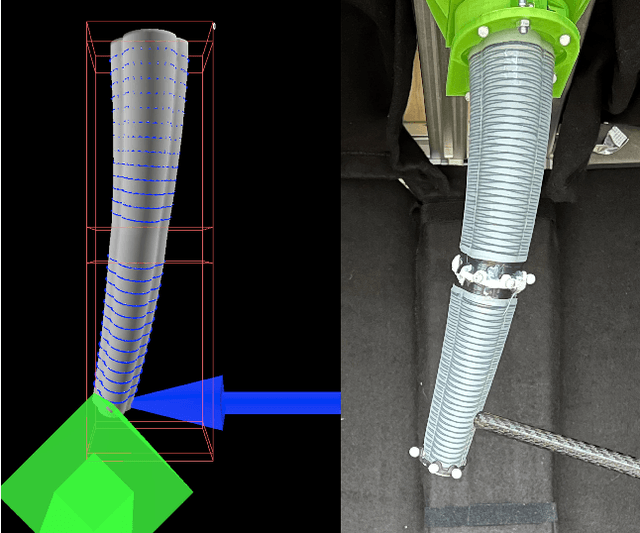
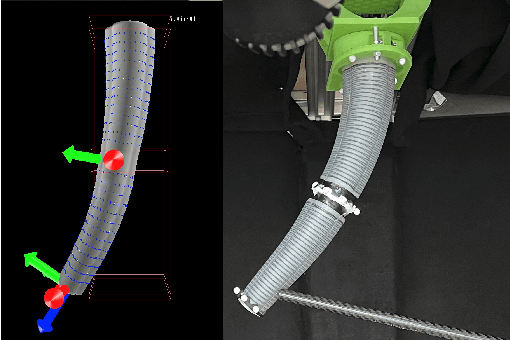
For soft robots to work effectively in human-centered environments, they need to be able to estimate their state and external interactions based on (proprioceptive) sensors. Estimating disturbances allows a soft robot to perform desirable force control. Even in the case of rigid manipulators, force estimation at the end-effector is seen as a non-trivial problem. And indeed, other current approaches to address this challenge have shortcomings that prevent their general application. They are often based on simplified soft dynamic models, such as the ones relying on a piece-wise constant curvature (PCC) approximation or matched rigid-body models that do not represent enough details of the problem. Thus, the applications needed for complex human-robot interaction can not be built. Finite element methods (FEM) allow for predictions of soft robot dynamics in a more generic fashion. Here, using the soft robot modeling capabilities of the framework SOFA, we build a detailed FEM model of a multi-segment soft continuum robotic arm composed of compliant deformable materials and fiber-reinforced pressurized actuation chambers with a model for sensors that provide orientation output. This model is used to establish a state observer for the manipulator. Model parameters were calibrated to match imperfections of the manual fabrication process using physical experiments. We then solve a quadratic programming inverse dynamics problem to compute the components of external force that explain the pose error. Our experiments show an average force estimation error of around 1.2%. As the methods proposed are generic, these results are encouraging for the task of building soft robots exhibiting complex, reactive, sensor-based behavior that can be deployed in human-centered environments.
Soft Robots Modeling: a Literature Unwinding
Dec 07, 2021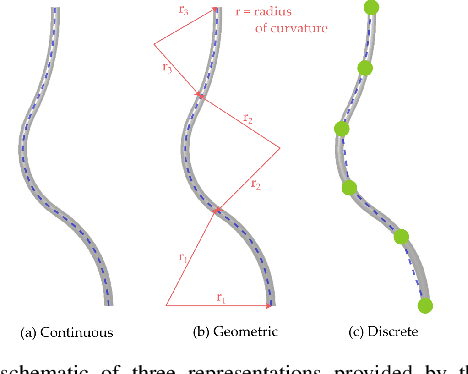

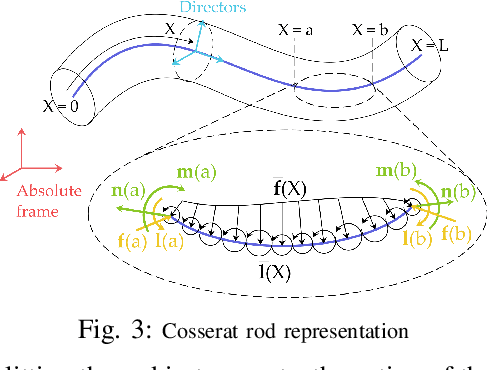
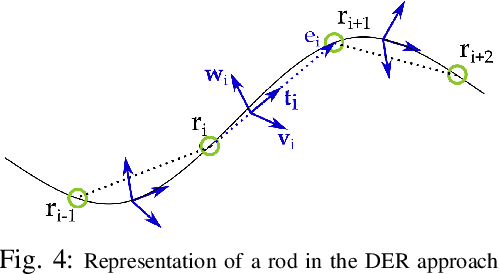
The robotics community has seen an exponential growth in the level of complexity of the theoretical tools presented for the modeling of soft robotics devices. Different solutions have been presented to overcome the difficulties related to the modeling of soft robots, often leveraging on other scientific disciplines, such as continuum mechanics and computer graphics. These theoretical foundations are often taken for granted and this lead to an intricate literature that, consequently, has never been the subject of a complete review. Withing this scenario, the objective of the presented paper is twofold. The common theoretical roots that relate the different families of modeling techniques are highlighted, employing a unifying language that ease the analysis of their main connections and differences. Thus, the listing of the approaches naturally follows and a complete, untangled, review of the main works on the field is finally provided.
Model Based Control of Soft Robots: A Survey of the State of the Art and Open Challenges
Oct 04, 2021


Continuum soft robots are mechanical systems entirely made of continuously deformable elements. This design solution aims to bring robots closer to invertebrate animals and soft appendices of vertebrate animals (e.g., an elephant's trunk, a monkey's tail). This work aims to introduce the control theorist perspective to this novel development in robotics. We aim to remove the barriers to entry into this field by presenting existing results and future challenges using a unified language and within a coherent framework. Indeed, the main difficulty in entering this field is the wide variability of terminology and scientific backgrounds, making it quite hard to acquire a comprehensive view on the topic. Another limiting factor is that it is not obvious where to draw a clear line between the limitations imposed by the technology not being mature yet and the challenges intrinsic to this class of robots. In this work, we argue that the intrinsic effects are the continuum or multi-body dynamics, the presence of a non-negligible elastic potential field, and the variability in sensing and actuation strategies.
Proximity Perception in Human-Centered Robotics: A Survey on Sensing Systems and Applications
Aug 17, 2021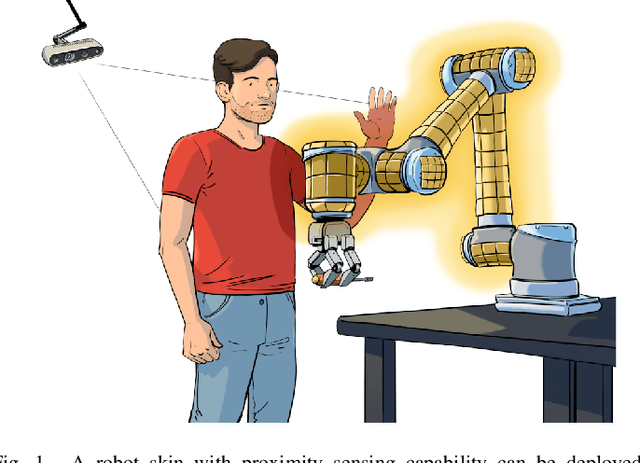

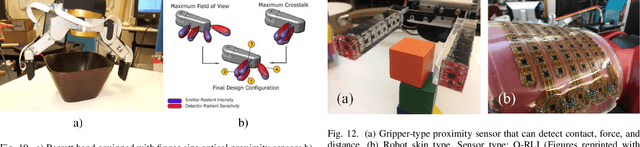

Proximity perception is a technology that has the potential to play an essential role in the future of robotics. It can fulfill the promise of safe, robust, and autonomous systems in industry and everyday life, alongside humans, as well as in remote locations in space and underwater. In this survey paper, we cover the developments of this field from the early days up to the present, with a focus on human-centered robotics. Here, proximity sensors are typically deployed in two scenarios: first, on the exterior of manipulator arms to support safety and interaction functionality, and second, on the inside of grippers or hands to support grasping and exploration. Starting from this observation, we propose a categorization for the approaches found in the literature. To provide a basis for understanding these approaches, we devote effort to present the technologies and different measuring principles that were developed over the years, also providing a summary in form of a table. Then, we show the diversity of applications that have been presented in the literature. Finally, we give an overview of the most important trends that will shape the future of this domain.