 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrictional Contact Solving for Material Point Method
Feb 02, 2026Accurately handling contact with friction remains a core bottleneck for Material Point Method (MPM), from reliable contact point detection to enforcing frictional contact laws (non-penetration, Coulomb friction, and maximum dissipation principle). In this paper, we introduce a frictional-contact pipeline for implicit MPM that is both precise and robust. During the collision detection phase, contact points are localized with particle-centric geometric primitives; during the contact resolution phase, we cast frictional contact as a Nonlinear Complementarity Problem (NCP) over contact impulses and solve it with an Alternating Direction Method of Multipliers (ADMM) scheme. Crucially, the formulation reuses the same implicit MPM linearization, yielding efficiency and numerical stability. The method integrates seamlessly into the implicit MPM loop and is agnostic to modeling choices, including material laws, interpolation functions, and transfer schemes. We evaluate it across seven representative scenes that span elastic and elasto-plastic responses, simple and complex deformable geometries, and a wide range of contact conditions. Overall, the proposed method enables accurate contact localization, reliable frictional handling, and broad generality, making it a practical solution for MPM-based simulations in robotics and related domains.
Modeling, Embedded Control and Design of Soft Robots using a Learned Condensed FEM Model
Mar 19, 2025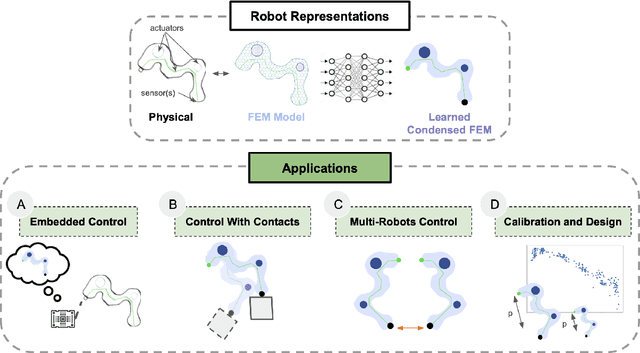

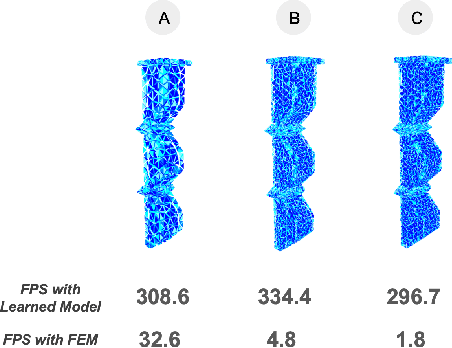

The Finite Element Method (FEM) is a powerful modeling tool for predicting soft robots' behavior, but its computation time can limit practical applications. In this paper, a learning-based approach based on condensation of the FEM model is detailed. The proposed method handles several kinds of actuators and contacts with the environment. We demonstrate that this compact model can be learned as a unified model across several designs and remains very efficient in terms of modeling since we can deduce the direct and inverse kinematics of the robot. Building upon the intuition introduced in [11], the learned model is presented as a general framework for modeling, controlling, and designing soft manipulators. First, the method's adaptability and versatility are illustrated through optimization based control problems involving positioning and manipulation tasks with mechanical contact-based coupling. Secondly, the low memory consumption and the high prediction speed of the learned condensed model are leveraged for real-time embedding control without relying on costly online FEM simulation. Finally, the ability of the learned condensed FEM model to capture soft robot design variations and its differentiability are leveraged in calibration and design optimization applications.
Differentiable Simulation of Soft Robots with Frictional Contacts
Jan 31, 2025



In recent years, soft robotics simulators have evolved to offer various functionalities, including the simulation of different material types (e.g., elastic, hyper-elastic) and actuation methods (e.g., pneumatic, cable-driven, servomotor). These simulators also provide tools for various tasks, such as calibration, design, and control. However, efficiently and accurately computing derivatives within these simulators remains a challenge, particularly in the presence of physical contact interactions. Incorporating these derivatives can, for instance, significantly improve the convergence speed of control methods like reinforcement learning and trajectory optimization, enable gradient-based techniques for design, or facilitate end-to-end machine-learning approaches for model reduction. This paper addresses these challenges by introducing a unified method for computing the derivatives of mechanical equations within the finite element method framework, including contact interactions modeled as a nonlinear complementarity problem. The proposed approach handles both collision and friction phases, accounts for their nonsmooth dynamics, and leverages the sparsity introduced by mesh-based models. Its effectiveness is demonstrated through several examples of controlling and calibrating soft systems.
Learning control strategy in soft robotics through a set of configuration spaces
Feb 21, 2024


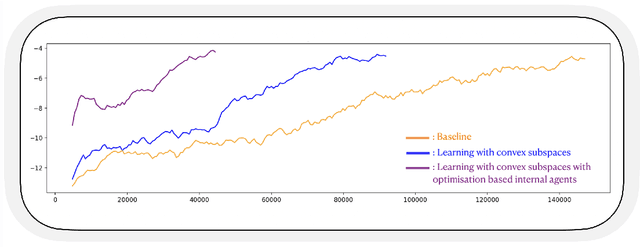
The ability of a soft robot to perform specific tasks is determined by its contact configuration, and transitioning between configurations is often necessary to reach a desired position or manipulate an object. Based on this observation, we propose a method for controlling soft robots that involves defining a graph of configuration spaces. Different agents, whether learned or not (convex optimization, expert trajectory, and collision detection), use the structure of the graph to solve the desired task. The graph and the agents are part of the prior knowledge that is intuitively integrated into the learning process. They are used to combine different optimization methods, improve sample efficiency, and provide interpretability. We construct the graph based on the contact configurations and demonstrate its effectiveness through two scenarios, a deformable beam in contact with its environment and a soft manipulator, where it outperforms the baseline in terms of stability, learning speed, and interpretability.
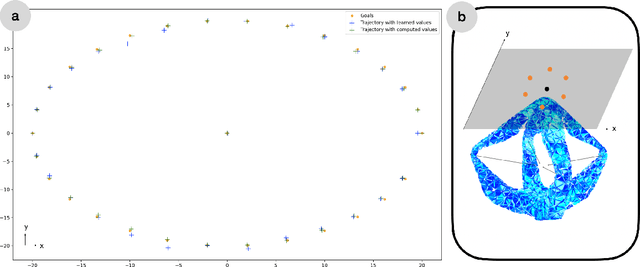
Toward the use of proxies for efficient learning manipulation and locomotion strategies on soft robots
Oct 25, 2023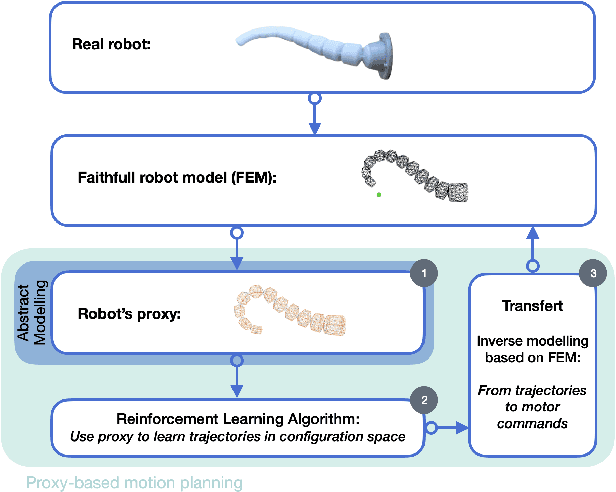
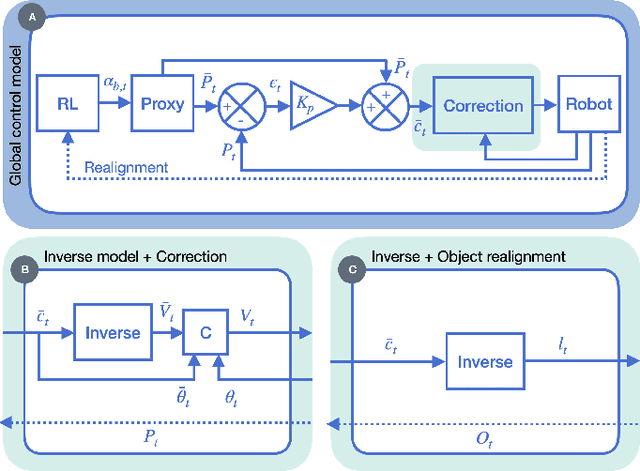
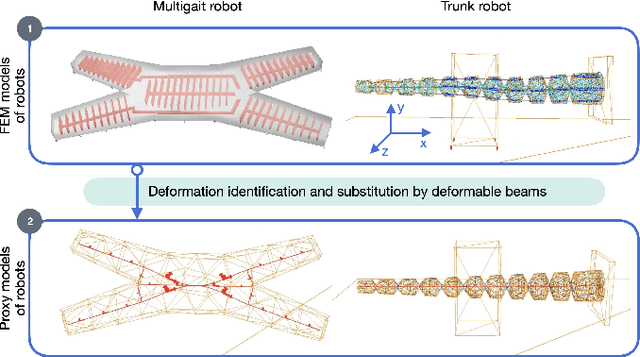
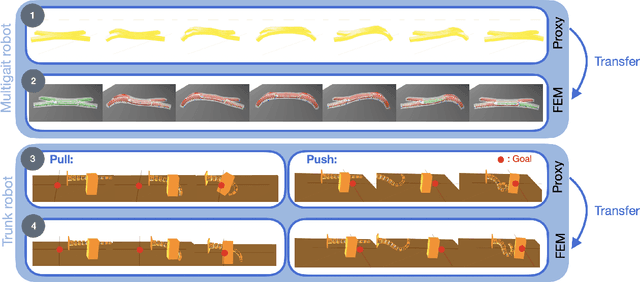
Soft robots are naturally designed to perform safe interactions with their environment, like locomotion and manipulation. In the literature, there are now many concepts, often bio-inspired, to propose new modes of locomotion or grasping. However, a methodology for implementing motion planning of these tasks, as exists for rigid robots, is still lacking. One of the difficulties comes from the modeling of these robots, which is very different, as it is based on the mechanics of deformable bodies. These models, whose dimension is often very large, make learning and optimization methods very costly. In this paper, we propose a proxy approach, as exists for humanoid robotics. This proxy is a simplified model of the robot that enables frugal learning of a motion strategy. This strategy is then transferred to the complete model to obtain the corresponding actuation inputs. Our methodology is illustrated and analyzed on two classical designs of soft robots doing manipulation and locomotion tasks.
Direct and inverse modeling of soft robots by learning a condensed FEM model
Jul 21, 2023


The Finite Element Method (FEM) is a powerful modeling tool for predicting the behavior of soft robots. However, its use for control can be difficult for non-specialists of numerical computation: it requires an optimization of the computation to make it real-time. In this paper, we propose a learning-based approach to obtain a compact but sufficiently rich mechanical representation. Our choice is based on nonlinear compliance data in the actuator/effector space provided by a condensation of the FEM model. We demonstrate that this compact model can be learned with a reasonable amount of data and, at the same time, be very efficient in terms of modeling, since we can deduce the direct and inverse kinematics of the robot. We also show how to couple some models learned individually in particular on an example of a gripper composed of two soft fingers. Other results are shown by comparing the inverse model derived from the full FEM model and the one from the compact learned version. This work opens new perspectives, namely for the embedded control of soft robots, but also for their design. These perspectives are also discussed in the paper.