 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Collocated Form with Input Decoupling of Lagrangian Systems
Jun 12, 2023Suitable representations of dynamical systems can simplify their analysis and control. On this line of thought, this paper considers the input decoupling problem for input-affine Lagrangian dynamics, namely the problem of finding a transformation of the generalized coordinates that decouples the input channels. We identify a class of systems for which this problem is solvable. Such systems are called collocated because the decoupling variables correspond to the coordinates on which the actuators directly perform work. Under mild conditions on the input matrix, a simple test is presented to verify whether a system is collocated or not. By exploiting power invariance, it is proven that a change of coordinates decouples the input channels if and only if the dynamics is collocated. We illustrate the theoretical results by considering several Lagrangian systems, focusing on underactuated mechanical systems, for which novel controllers that exploit input decoupling are designed.
Soft Robots Modeling: a Literature Unwinding
Dec 07, 2021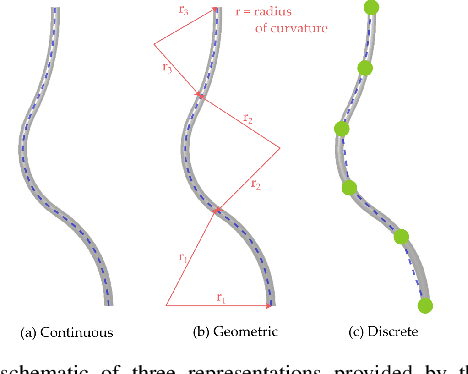

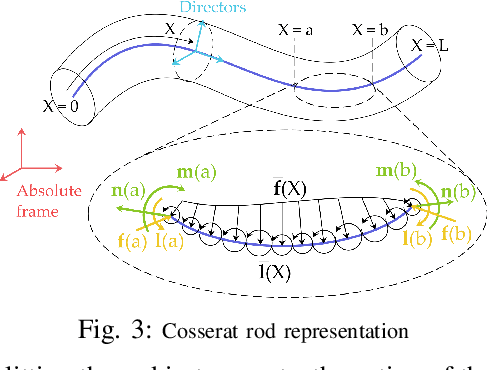
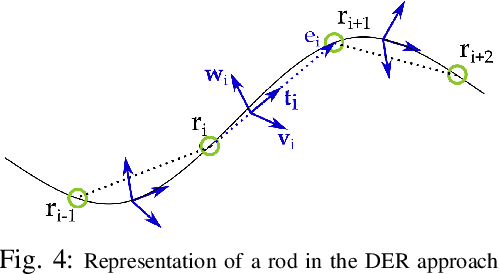
The robotics community has seen an exponential growth in the level of complexity of the theoretical tools presented for the modeling of soft robotics devices. Different solutions have been presented to overcome the difficulties related to the modeling of soft robots, often leveraging on other scientific disciplines, such as continuum mechanics and computer graphics. These theoretical foundations are often taken for granted and this lead to an intricate literature that, consequently, has never been the subject of a complete review. Withing this scenario, the objective of the presented paper is twofold. The common theoretical roots that relate the different families of modeling techniques are highlighted, employing a unifying language that ease the analysis of their main connections and differences. Thus, the listing of the approaches naturally follows and a complete, untangled, review of the main works on the field is finally provided.
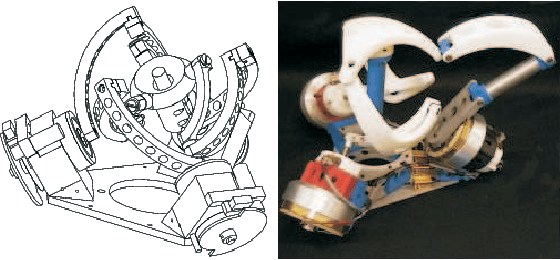
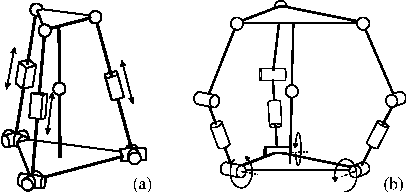
Multi-Objective Design Optimization of the Leg Mechanism for a Piping Inspection Robot
Jun 18, 2014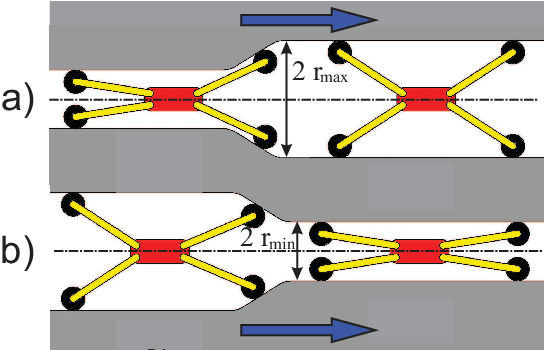
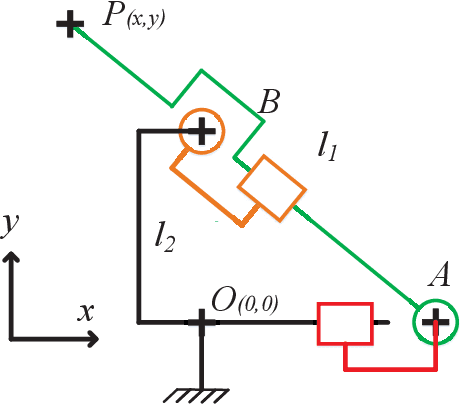
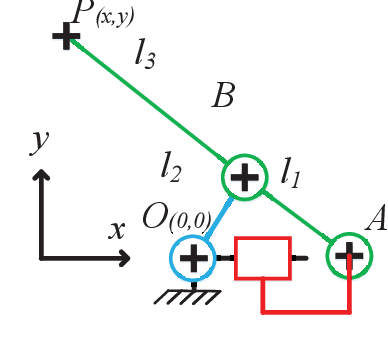
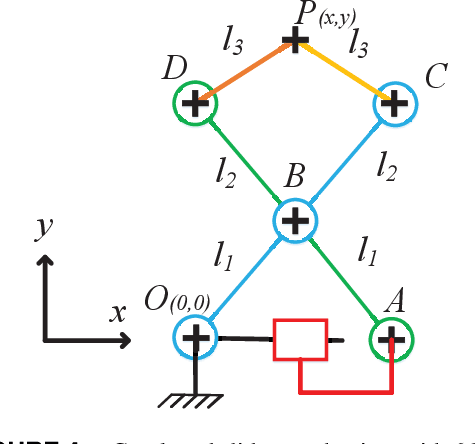
This paper addresses the dimensional synthesis of an adaptive mechanism of contact points ie a leg mechanism of a piping inspection robot operating in an irradiated area as a nuclear power plant. This studied mechanism is the leading part of the robot sub-system responsible of the locomotion. Firstly, three architectures are chosen from the literature and their properties are described. Then, a method using a multi-objective optimization is proposed to determine the best architecture and the optimal geometric parameters of a leg taking into account environmental and design constraints. In this context, the objective functions are the minimization of the mechanism size and the maximization of the transmission force factor. Representations of the Pareto front versus the objective functions and the design parameters are given. Finally, the CAD model of several solutions located on the Pareto front are presented and discussed.
The eel-like robot
Sep 02, 2009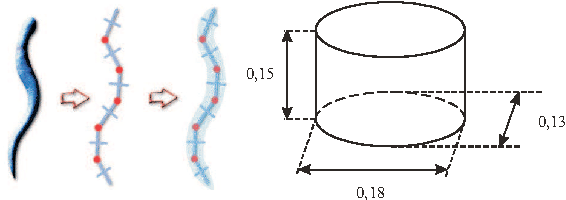
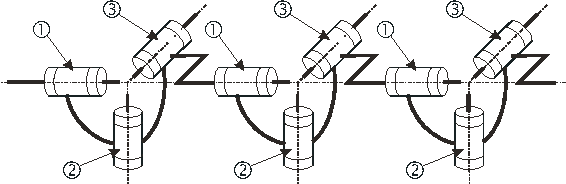
The aim of this project is to design, study and build an "eel-like robot" prototype able to swim in three dimensions. The study is based on the analysis of eel swimming and results in the realization of a prototype with 12 vertebrae, a skin and a head with two fins. To reach these objectives, a multidisciplinary group of teams and laboratories has been formed in the framework of two French projects.