 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing Robot Positioning Against Placement Inaccuracies: A Study on the Fanuc CRX10iA/L
Nov 19, 2025This study presents a methodology for determining the optimal base placement of a Fanuc CRX10iA/L collaborative robot for a desired trajectory corresponding to an industrial task. The proposed method uses a particle swarm optimization algorithm that explores the search space to find positions for performing the trajectory. An $α$-shape algorithm is then used to draw the borders of the feasibility areas, and the largest circle inscribed is calculated from the Voronoi diagrams. The aim of this approach is to provide a robustness criterion in the context of robot placement inaccuracies that may be encountered, for example, if the robot is placed on a mobile base when the system is deployed by an operator. The approach developed uses an inverse kinematics model to evaluate all initial configurations, then moves the robot end-effector along the reference trajectory using the Jacobian matrix and assigns a score to the attempt. For the Fanuc CRX10iA/L robot, there can be up to 16 solutions to the inverse kinematics model. The calculation of these solutions is not trivial and requires a specific study that planning tools such as MoveIt cannot fully take into account. Additionally, the optimization process must consider constraints such as joint limits, singularities, and workspace limitations to ensure feasible and efficient trajectory execution.
Comparison of robot morphologies and base positioning for welding applications
Jul 08, 2024This article undertakes a comprehensive examination of two distinct robot morphologies: the PUMA-type arm (Programmable Universal Machine for Assembly) and the UR-type robot (Universal Robots). The primary aim of this comparative analysis is to assess their respective performances within the specialized domain of welding, focusing on predefined industrial application scenarios. These scenarios encompass a range of geometrical components earmarked for welding, along with specified welding paths, spatial constraints, and welding methodologies reflective of real-world scenarios encountered by manual welders. The case studies presented in this research serve as illustrative examples of Weez-U Welding practices, providing insights into the practical implications of employing different robot morphologies. Moreover, this study distinguishes between various base positions for the robot, thereby aiding welders in selecting the optimal base placement aligned with their specific welding objectives. By offering such insights, this research facilitates the selection of the most suitable architecture for this particular range of trajectories, thus optimizing welding efficiency and effectiveness. A departure from conventional methodologies, this study goes beyond merely considering singularities and also delves into the analysis of collisions between the robot and its environment, contingent upon the robot's posture. This holistic approach offers a more nuanced understanding of the challenges and considerations inherent in deploying robotic welding systems, providing valuable insights for practitioners and researchers alike in the field of robotic welding technology.
Multi-Objective Design Optimization of the Leg Mechanism for a Piping Inspection Robot
Jun 18, 2014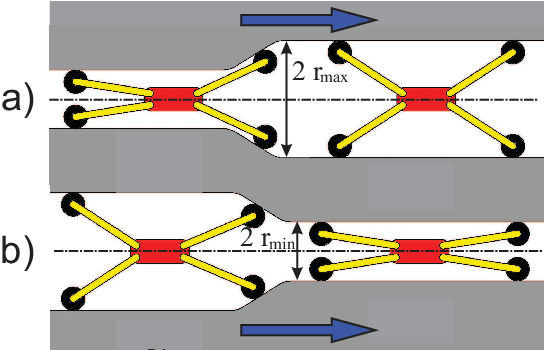
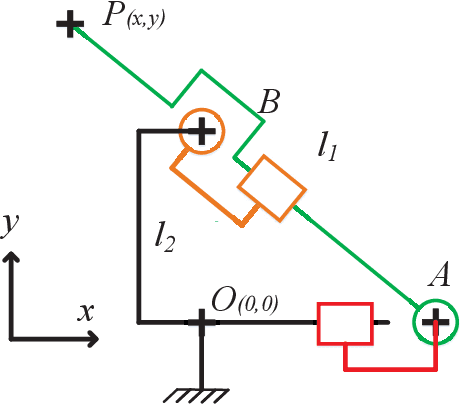
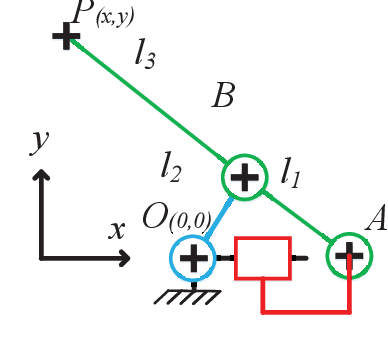
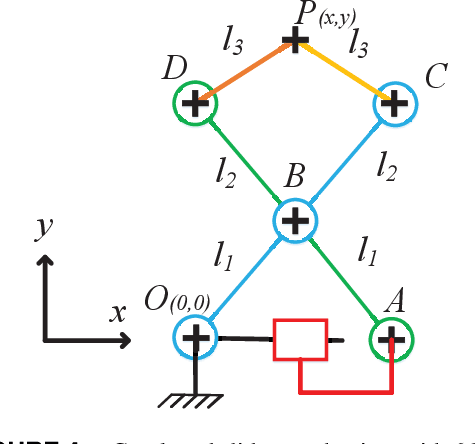
This paper addresses the dimensional synthesis of an adaptive mechanism of contact points ie a leg mechanism of a piping inspection robot operating in an irradiated area as a nuclear power plant. This studied mechanism is the leading part of the robot sub-system responsible of the locomotion. Firstly, three architectures are chosen from the literature and their properties are described. Then, a method using a multi-objective optimization is proposed to determine the best architecture and the optimal geometric parameters of a leg taking into account environmental and design constraints. In this context, the objective functions are the minimization of the mechanism size and the maximization of the transmission force factor. Representations of the Pareto front versus the objective functions and the design parameters are given. Finally, the CAD model of several solutions located on the Pareto front are presented and discussed.