 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA virtual-variable-length method for robust inverse kinematics of multi-segment continuum robots
Apr 02, 2026This paper proposes a new, robust method to solve the inverse kinematics (IK) of multi-segment continuum manipulators. Conventional Jacobian-based solvers, especially when initialized from neutral/rest configurations, often exhibit slow convergence and, in certain conditions, may fail to converge (deadlock). The Virtual-Variable-Length (VVL) method proposed here introduces fictitious variations of segments' length during the solution iteration, conferring virtual axial degrees of freedom that alleviate adverse behaviors and constraints, thus enabling or accelerating convergence. Comprehensive numerical experiments were conducted to compare the VVL method against benchmark Jacobian-based and Damped Least Square IK solvers. Across more than $1.8\times 10^6$ randomized trials covering manipulators with two to seven segments, the proposed approach achieved up to a 20$\%$ increase in convergence success rate over the benchmark and a 40-80$\%$ reduction in average iteration count under equivalent accuracy thresholds ($10^{-4}-10^{-8}$). While deadlocks are not restricted to workspace boundaries and may occur at arbitrary poses, our empirical study identifies boundary-proximal configurations as a frequent cause of failed convergence and the VVL method mitigates such occurrences over a statistical sample of test cases.
Coordinated Manipulation of Hybrid Deformable-Rigid Objects in Constrained Environments
Mar 13, 2026Coordinated robotic manipulation of deformable linear objects (DLOs), such as ropes and cables, has been widely studied; however, handling hybrid assemblies composed of both deformable and rigid elements in constrained environments remains challenging. This work presents a quasi-static optimization-based manipulation planner that employs a strain-based Cosserat rod model, extending rigid-body formulations to hybrid deformable linear objects (hDLO). The proposed planner exploits the compliance of deformable links to maneuver through constraints while achieving task-space objectives for the object that are unreachable with rigid tools. By leveraging a differentiable model with analytically derived gradients, the method achieves up to a 33x speedup over finite-difference baselines for inverse kinetostatic(IKS) problems. Furthermore, the subsequent trajectory optimization problem, warm-started using the IKS solution, is only practically realizable via analytical derivatives. The proposed algorithm is validated in simulation on various hDLO systems and experimentally on a three-link hDLO manipulated in a constrained environment using a dual-arm robotic system. Experimental results confirm the planner's accuracy, yielding an average deformation error of approximately 3 cm (5% of the deformable link length) between the desired and measured marker positions. Finally, the proposed optimal planner is compared against a sampling-based feasibility planner adapted to the strain-based formulation. The results demonstrate the effectiveness and applicability of the proposed approach for robotic manipulation of hybrid assemblies in constrained environments.
Model-based Optimal Control for Rigid-Soft Underactuated Systems
Feb 03, 2026Continuum soft robots are inherently underactuated and subject to intrinsic input constraints, making dynamic control particularly challenging, especially in hybrid rigid-soft robots. While most existing methods focus on quasi-static behaviors, dynamic tasks such as swing-up require accurate exploitation of continuum dynamics. This has led to studies on simple low-order template systems that often fail to capture the complexity of real continuum deformations. Model-based optimal control offers a systematic solution; however, its application to rigid-soft robots is often limited by the computational cost and inaccuracy of numerical differentiation for high-dimensional models. Building on recent advances in the Geometric Variable Strain model that enable analytical derivatives, this work investigates three optimal control strategies for underactuated soft systems-Direct Collocation, Differential Dynamic Programming, and Nonlinear Model Predictive Control-to perform dynamic swing-up tasks. To address stiff continuum dynamics and constrained actuation, implicit integration schemes and warm-start strategies are employed to improve numerical robustness and computational efficiency. The methods are evaluated in simulation on three Rigid-Soft and high-order soft benchmark systems-the Soft Cart-Pole, the Soft Pendubot, and the Soft Furuta Pendulum- highlighting their performance and computational trade-offs.
Collision Detection with Analytical Derivatives of Contact Kinematics
Feb 03, 2026Differentiable contact kinematics are essential for gradient-based methods in robotics, yet the mapping from robot state to contact distance, location, and normal becomes non-smooth in degenerate configurations of shapes with zero or undefined curvature. We address this inherent limitation by selectively regularizing such geometries into strictly convex implicit representations, restoring uniqueness and smoothness of the contact map. Leveraging this geometric regularization, we develop iDCOL, an implicit differentiable collision detection and contact kinematics framework. iDCOL represents colliding bodies using strictly convex implicit surfaces and computes collision detection and contact kinematics by solving a fixed-size nonlinear system derived from a geometric scaling-based convex optimization formulation. By applying the Implicit Function Theorem to the resulting system residual, we derive analytical derivatives of the contact kinematic quantities. We develop a fast Newton-based solver for iDCOL and provide an open-source C++ implementation of the framework. The robustness of the approach is evaluated through extensive collision simulations and benchmarking, and applicability is demonstrated in gradient-based kinematic path planning and differentiable contact physics, including multi-body rigid collisions and a soft-robot interaction example.
A Survey on Soft Robot Adaptability: Implementations, Applications, and Prospects
Jun 24, 2025Soft robots, compared to rigid robots, possess inherent advantages, including higher degrees of freedom, compliance, and enhanced safety, which have contributed to their increasing application across various fields. Among these benefits, adaptability is particularly noteworthy. In this paper, adaptability in soft robots is categorized into external and internal adaptability. External adaptability refers to the robot's ability to adjust, either passively or actively, to variations in environments, object properties, geometries, and task dynamics. Internal adaptability refers to the robot's ability to cope with internal variations, such as manufacturing tolerances or material aging, and to generalize control strategies across different robots. As the field of soft robotics continues to evolve, the significance of adaptability has become increasingly pronounced. In this review, we summarize various approaches to enhancing the adaptability of soft robots, including design, sensing, and control strategies. Additionally, we assess the impact of adaptability on applications such as surgery, wearable devices, locomotion, and manipulation. We also discuss the limitations of soft robotics adaptability and prospective directions for future research. By analyzing adaptability through the lenses of implementation, application, and challenges, this paper aims to provide a comprehensive understanding of this essential characteristic in soft robotics and its implications for diverse applications.
Dynamic Manipulation of Deformable Objects in 3D: Simulation, Benchmark and Learning Strategy
May 23, 2025Goal-conditioned dynamic manipulation is inherently challenging due to complex system dynamics and stringent task constraints, particularly in deformable object scenarios characterized by high degrees of freedom and underactuation. Prior methods often simplify the problem to low-speed or 2D settings, limiting their applicability to real-world 3D tasks. In this work, we explore 3D goal-conditioned rope manipulation as a representative challenge. To mitigate data scarcity, we introduce a novel simulation framework and benchmark grounded in reduced-order dynamics, which enables compact state representation and facilitates efficient policy learning. Building on this, we propose Dynamics Informed Diffusion Policy (DIDP), a framework that integrates imitation pretraining with physics-informed test-time adaptation. First, we design a diffusion policy that learns inverse dynamics within the reduced-order space, enabling imitation learning to move beyond na\"ive data fitting and capture the underlying physical structure. Second, we propose a physics-informed test-time adaptation scheme that imposes kinematic boundary conditions and structured dynamics priors on the diffusion process, ensuring consistency and reliability in manipulation execution. Extensive experiments validate the proposed approach, demonstrating strong performance in terms of accuracy and robustness in the learned policy.
ZodiAq: An Isotropic Flagella-Inspired Soft Underwater Drone for Safe Marine Exploration
Mar 25, 2025

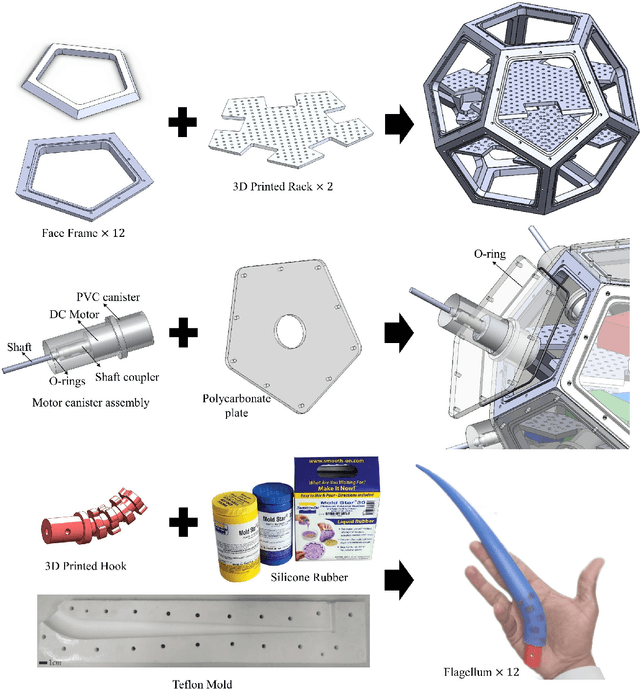

The inherent challenges of robotic underwater exploration, such as hydrodynamic effects, the complexity of dynamic coupling, and the necessity for sensitive interaction with marine life, call for the adoption of soft robotic approaches in marine exploration. To address this, we present a novel prototype, ZodiAq, a soft underwater drone inspired by prokaryotic bacterial flagella. ZodiAq's unique dodecahedral structure, equipped with 12 flagella-like arms, ensures design redundancy and compliance, ideal for navigating complex underwater terrains. The prototype features a central unit based on a Raspberry Pi, connected to a sensory system for inertial, depth, and vision detection, and an acoustic modem for communication. Combined with the implemented control law, it renders ZodiAq an intelligent system. This paper details the design and fabrication process of ZodiAq, highlighting design choices and prototype capabilities. Based on the strain-based modeling of Cosserat rods, we have developed a digital twin of the prototype within a simulation toolbox to ease analysis and control. To optimize its operation in dynamic aquatic conditions, a simplified model-based controller has been developed and implemented, facilitating intelligent and adaptive movement in the hydrodynamic environment. Extensive experimental demonstrations highlight the drone's potential, showcasing its design redundancy, embodied intelligence, crawling gait, and practical applications in diverse underwater settings. This research contributes significantly to the field of underwater soft robotics, offering a promising new avenue for safe, efficient, and environmentally conscious underwater exploration.
Soft Vision-Based Tactile-Enabled SixthFinger: Advancing Daily Objects Manipulation for Stroke Survivors
Jan 12, 2025The presence of post-stroke grasping deficiencies highlights the critical need for the development and implementation of advanced compensatory strategies. This paper introduces a novel system to aid chronic stroke survivors through the development of a soft, vision-based, tactile-enabled extra robotic finger. By incorporating vision-based tactile sensing, the system autonomously adjusts grip force in response to slippage detection. This synergy not only ensures mechanical stability but also enriches tactile feedback, mimicking the dynamics of human-object interactions. At the core of our approach is a transformer-based framework trained on a comprehensive tactile dataset encompassing objects with a wide range of morphological properties, including variations in shape, size, weight, texture, and hardness. Furthermore, we validated the system's robustness in real-world applications, where it successfully manipulated various everyday objects. The promising results highlight the potential of this approach to improve the quality of life for stroke survivors.
Real-time Dynamics of Soft Manipulators with Cross-section Inflation: Application to the Octopus Muscular Hydrostat
Dec 04, 2024Inspired by the embodied intelligence of biological creatures like the octopus, the soft robotic arm utilizes its highly flexible structure to perform various tasks in the complex environment. While the classic Cosserat rod theory investigates the bending, twisting, shearing, and stretching of the soft arm, it fails to capture the in-plane deformation that occurs during certain tasks, particularly those involving active lateral traction. This paper introduces an extended Cosserat rod theory addressing these limitations by incorporating an extra strain variable reflecting the in-plane inflation ratio. To accurately describe the viscoelasticity effect of the soft body in dynamics, the proposed model enhances the constitutive law by integrating the Saint-Venant Kirchhoff hyperelastic and Kelvin-Voigt viscous models. The active and environmental loads are accounted for the equations of motion, which are numerically solved by adapting the Geometric Variable Strain (GVS) approach to balance the accuracy and computational efficiency. Our contributions include the derivation of the extended Cosserat rod theory in dynamic context, and the development of a reduced-order numerical method that enables rapid and precise solutions. We demonstrate applications of the model in stiffness tuning of a soft robotic arm and the study of complex octopus' arm motions.
Boundary Control Behaviors of Multiple Low-cost AUVs Using Acoustic Communication
Nov 28, 2024



This study presents acoustic-based methods for the control of multiple autonomous underwater vehicles (AUV). This study proposes two different models for implementing boundary and path control on low-cost AUVs using acoustic communication and a single central acoustic beacon. Two methods are presented: the Range Variation-Based (RVB) model completely relies on range data obtained by acoustic modems, whereas the Heading Estimation-Based (HEB) model uses ranges and range rates to estimate the position of the central boundary beacon and perform assigned behaviors. The models are tested on two boundary control behaviors: Fencing and Milling. Fencing behavior ensures AUVs return within predefined boundaries, while Milling enables the AUVs to move cyclically on a predefined path around the beacon. Models are validated by successfully performing the boundary control behaviors in simulations, pool tests, including artificial underwater currents, and field tests conducted in the ocean. All tests were performed with fully autonomous platforms, and no external input or sensor was provided to the AUVs during validation. Quantitative and qualitative analyses are presented in the study, focusing on the effect and application of a multi-robot system.