 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImage-based Morphological Characterization of Filamentous Biological Structures with Non-constant Curvature Shape Feature
Nov 09, 2025Tendrils coil their shape to anchor the plant to supporting structures, allowing vertical growth toward light. Although climbing plants have been studied for a long time, extracting information regarding the relationship between the temporal shape change, the event that triggers it, and the contact location is still challenging. To help build this relation, we propose an image-based method by which it is possible to analyze shape changes over time in tendrils when mechano-stimulated in different portions of their body. We employ a geometric approach using a 3D Piece-Wise Clothoid-based model to reconstruct the configuration taken by a tendril after mechanical rubbing. The reconstruction shows high robustness and reliability with an accuracy of R2 > 0.99. This method demonstrates distinct advantages over deep learning-based approaches, including reduced data requirements, lower computational costs, and interpretability. Our analysis reveals higher responsiveness in the apical segment of tendrils, which might correspond to higher sensitivity and tissue flexibility in that region of the organs. Our study provides a methodology for gaining new insights into plant biomechanics and offers a foundation for designing and developing novel intelligent robotic systems inspired by climbing plants.
A Survey on Soft Robot Adaptability: Implementations, Applications, and Prospects
Jun 24, 2025Soft robots, compared to rigid robots, possess inherent advantages, including higher degrees of freedom, compliance, and enhanced safety, which have contributed to their increasing application across various fields. Among these benefits, adaptability is particularly noteworthy. In this paper, adaptability in soft robots is categorized into external and internal adaptability. External adaptability refers to the robot's ability to adjust, either passively or actively, to variations in environments, object properties, geometries, and task dynamics. Internal adaptability refers to the robot's ability to cope with internal variations, such as manufacturing tolerances or material aging, and to generalize control strategies across different robots. As the field of soft robotics continues to evolve, the significance of adaptability has become increasingly pronounced. In this review, we summarize various approaches to enhancing the adaptability of soft robots, including design, sensing, and control strategies. Additionally, we assess the impact of adaptability on applications such as surgery, wearable devices, locomotion, and manipulation. We also discuss the limitations of soft robotics adaptability and prospective directions for future research. By analyzing adaptability through the lenses of implementation, application, and challenges, this paper aims to provide a comprehensive understanding of this essential characteristic in soft robotics and its implications for diverse applications.
Mastering Contact-rich Tasks by Combining Soft and Rigid Robotics with Imitation Learning
Oct 10, 2024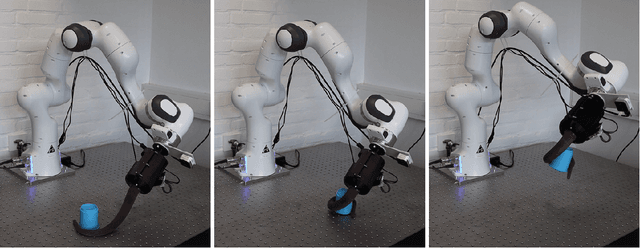
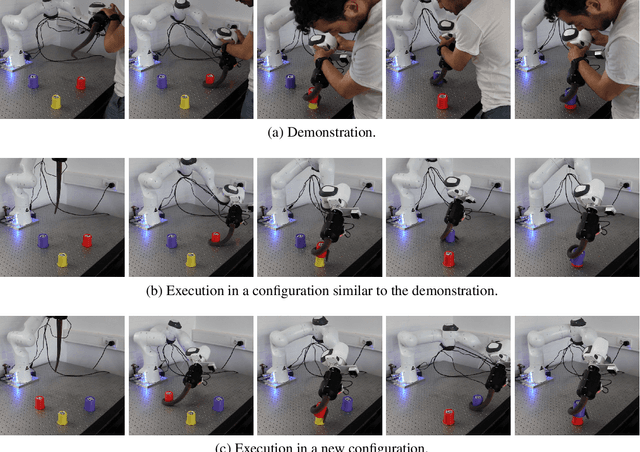
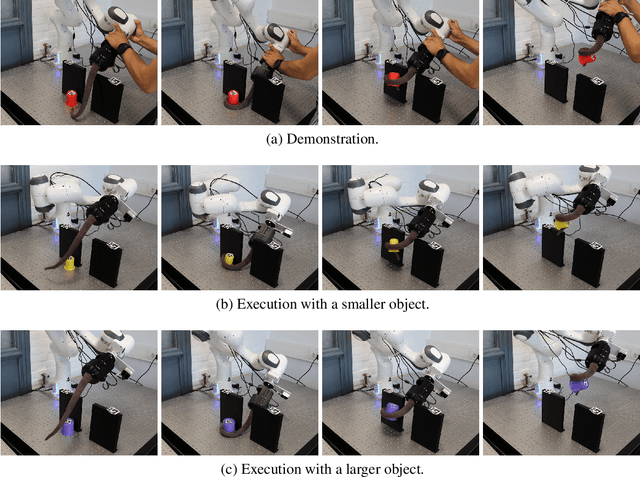

Soft robots have the potential to revolutionize the use of robotic systems with their capability of establishing safe, robust, and adaptable interactions with their environment, but their precise control remains challenging. In contrast, traditional rigid robots offer high accuracy and repeatability but lack the flexibility of soft robots. We argue that combining these characteristics in a hybrid robotic platform can significantly enhance overall capabilities. This work presents a novel hybrid robotic platform that integrates a rigid manipulator with a fully developed soft arm. This system is equipped with the intelligence necessary to perform flexible and generalizable tasks through imitation learning autonomously. The physical softness and machine learning enable our platform to achieve highly generalizable skills, while the rigid components ensure precision and repeatability.
Soft robotics towards sustainable development goals and climate actions
Mar 21, 2023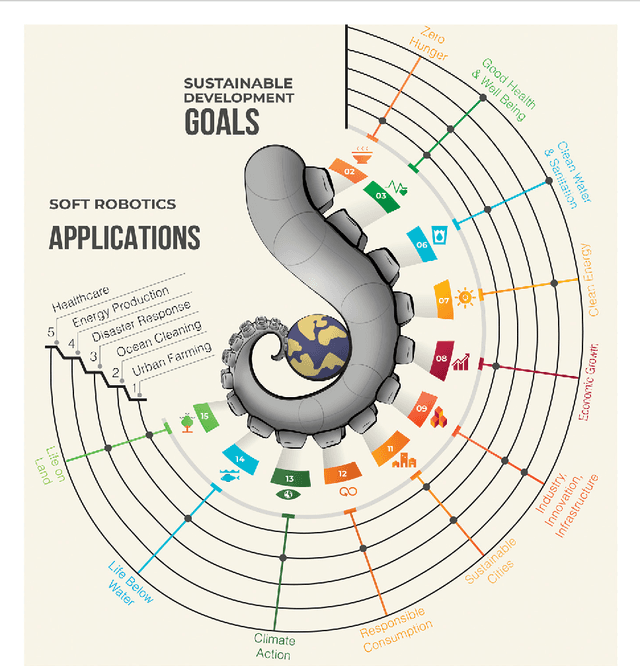
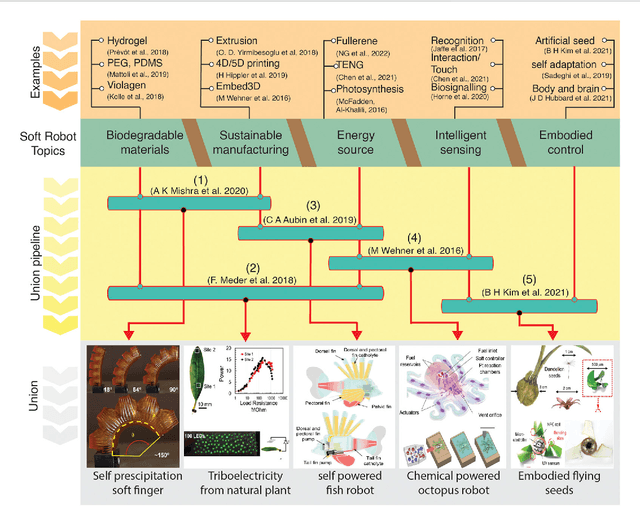
Soft robotics technology can aid in achieving United Nations Sustainable Development Goals (SDGs) and the Paris Climate Agreement through development of autonomous, environmentally responsible machines powered by renewable energy. By utilizing soft robotics, we can mitigate the detrimental effects of climate change on human society and the natural world through fostering adaptation, restoration, and remediation. Moreover, the implementation of soft robotics can lead to groundbreaking discoveries in material science, biology, control systems, energy efficiency, and sustainable manufacturing processes. However, to achieve these goals, we need further improvements in understanding biological principles at the basis of embodied and physical intelligence, environment-friendly materials, and energy-saving strategies to design and manufacture self-piloting and field-ready soft robots. This paper provides insights on how soft robotics can address the pressing issue of environmental sustainability. Sustainable manufacturing of soft robots at a large scale, exploring the potential of biodegradable and bioinspired materials, and integrating onboard renewable energy sources to promote autonomy and intelligence are some of the urgent challenges of this field that we discuss in this paper. Specifically, we will present field-ready soft robots that address targeted productive applications in urban farming, healthcare, land and ocean preservation, disaster remediation, and clean and affordable energy, thus supporting some of the SDGs. By embracing soft robotics as a solution, we can concretely support economic growth and sustainable industry, drive solutions for environment protection and clean energy, and improve overall health and well-being.
Physics-Data Driven Machine Learning Based Model: A Hybrid Way for Nonlinear, Dynamic, and Open-loop Identification of IPMC Soft Artificial Muscles
Mar 03, 2022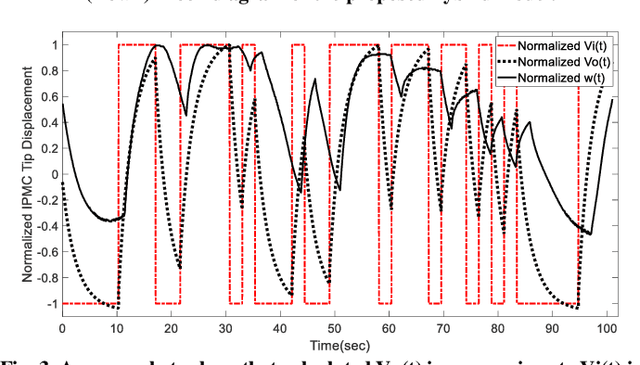
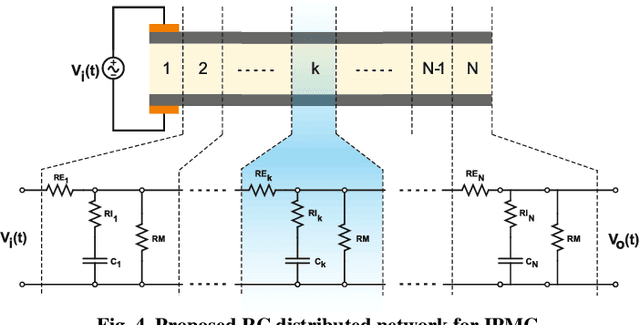
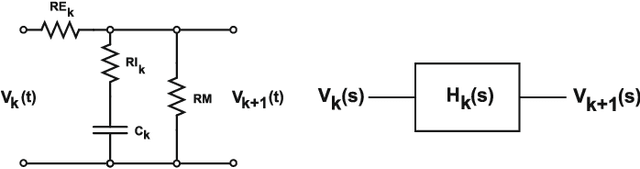
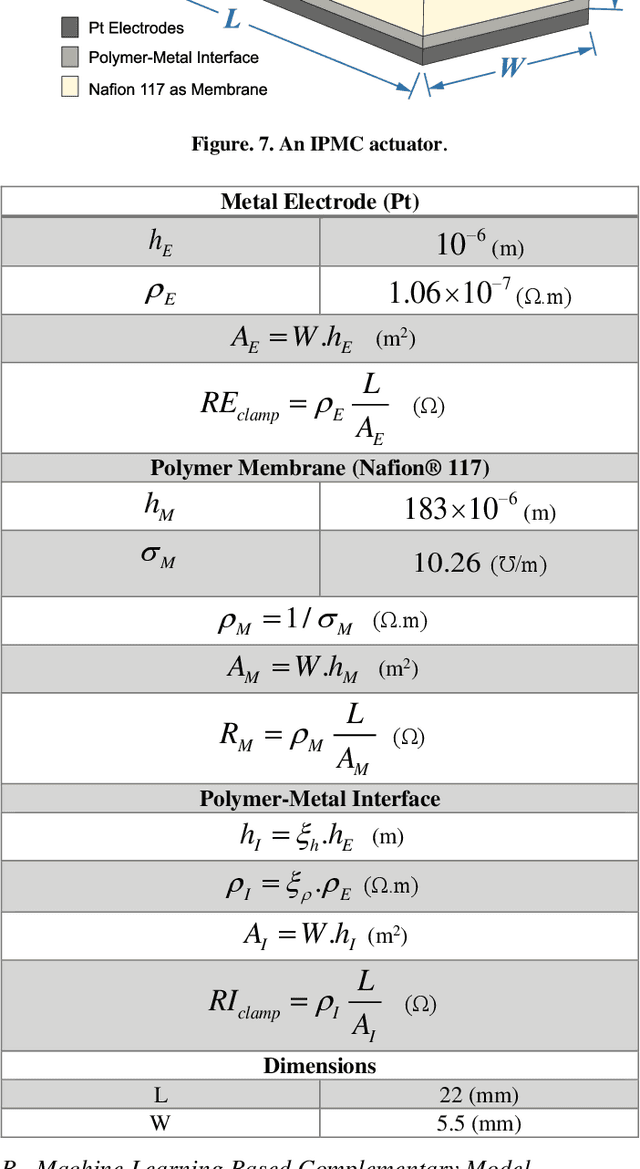
Ionic Polymer Metal Composites (IPMCs) are one of the most preferred choices among biocompatible materials for industrial and biomedical applications. Despite their advantages, some of their drawbacks include non-linear and hysteretic behavior, which complicates the modeling process. In previous works, usually autoregressive models were used to predict the behavior of an IPMC actuator. The main drawback of using an autoregressive model is that it cannot be used in mobile and real-time applications. In this study, we proposed a hybrid analytical intelligent model for an IPMC actuator. The most outstanding feature of this model is its non-autoregressive structure. The hybrid concept proposed in this study can be generalized to various problems other than IPMCs. The structure used in this work comprises an analytical model and a deep neural network, providing a non-linear, dynamic, and non-autoregressive model for the IPMC actuator. Lastly, the average NMSE achieved using the proposed hybrid model is 9.5781e-04 showing a significant drop in the error rate compared to other non-autoregressive structures.
A Plant-Inspired Multifunctional, Two Way, and Fiberless Soft Gripper with Sensorized Kinaesthesia
Mar 03, 2022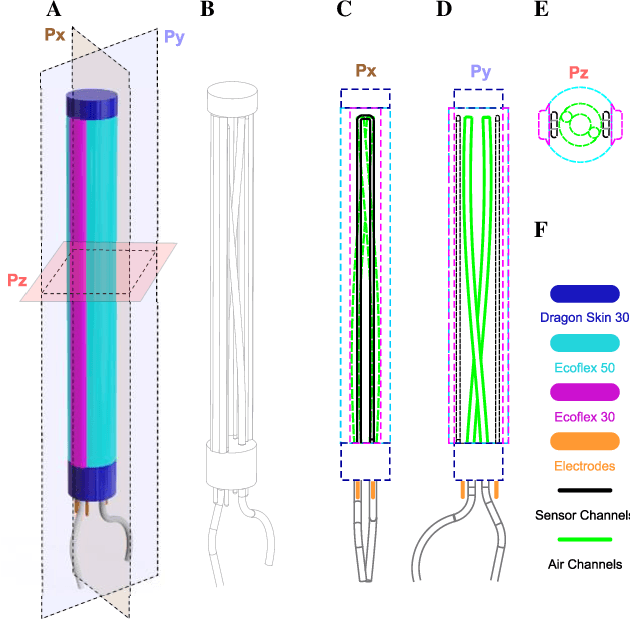
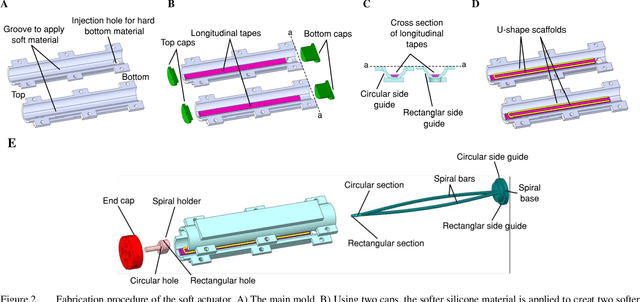
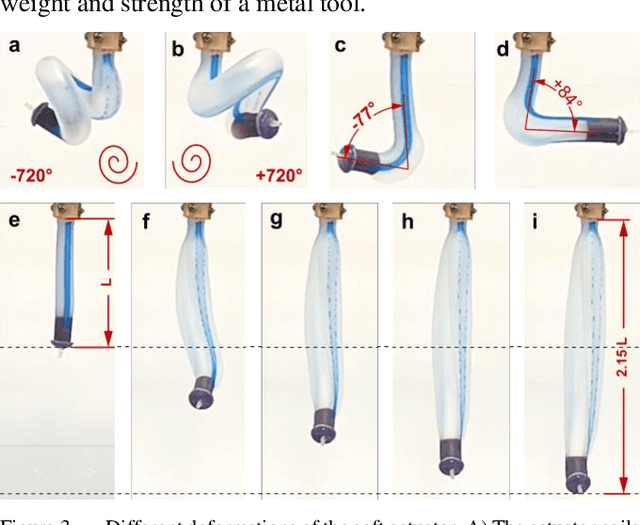

This work presents a new fiberless soft pneumatic actuator that can work multifunctional and bidirectional, and its embedded sensors give it a self-proprioception ability. This actuator works based on the idea of employing helical pressure channels. Applying the controlled input pressures into these two channels causes a variety of deformations and actuation. In particular, single pressure, imbalanced pressures, and balanced pressures applied in the channels cause bidirectional coilings, opposite bendings, and elongation, respectively, in a single unit actuator. Also, two U-shaped microchannels are created, and by injecting a gel-based conductive material, the actuator is equipped with resistive sensors which are responsive to a vast dynamic range from a small oscillation to a large elongation. This actuator has so many promising features as a multifunctional soft gripper, and its embedded soft sensors enable it to have better controllability in real problems. The multifunctionality of this actuator has been validated with several experimental tests, and also we have shown it has excellent potential in gripping a variety of objects. Finally, the embedded sensors can discriminate the main functions of actuators, and also they can play the role of independent sensors as well like a stretch, pressure, or bending sensors.
A novel fully 3D, microfluidic-oriented, gel-based and low cost stretchable soft sensor
Jun 13, 2021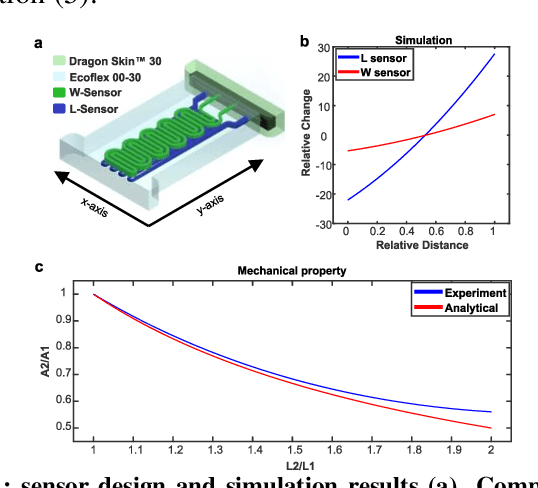
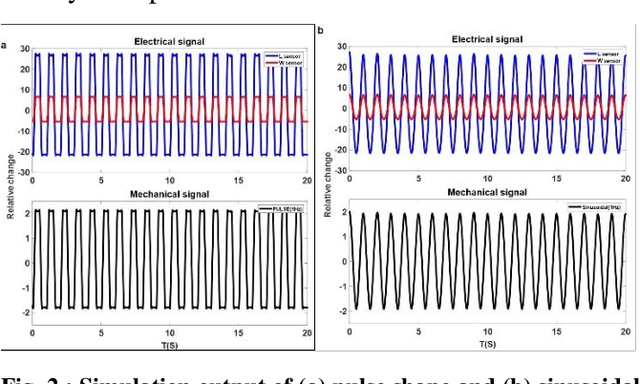
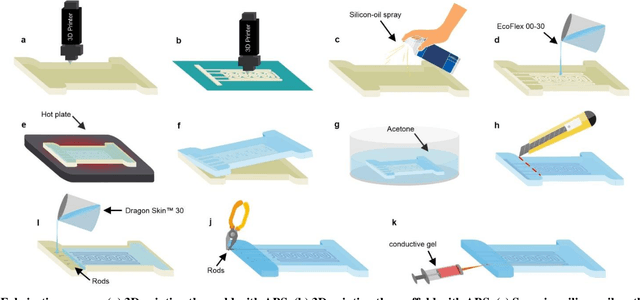
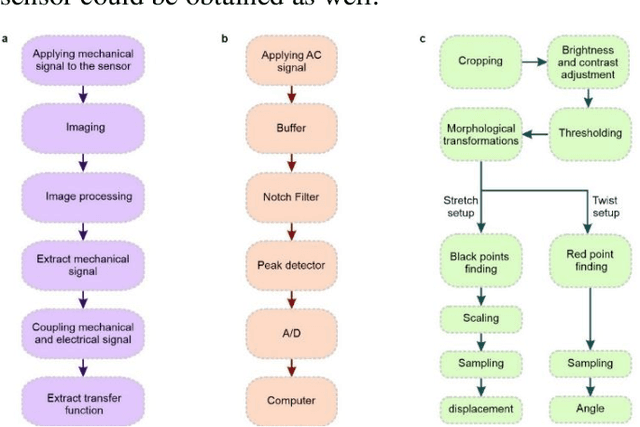
In this paper, a novel fully 3D, microfluidic-oriented, gel-based, and low-cost highly stretchable resistive sensors have been presented. By the proposed method we are able to measure and discriminate all of the stretch, twist, and pressure features by a single sensor which is the potential that we have obtained from the fully 3D structure of our sensor. Against previous sensors which all have used EGaIn as the conductive material of their sensor, we have used low-cost, safe, and ubiquitous glycol-based gel instead. To show the functionality of the proposed sensor some FEM simulations, a set of the designed experimental tests were done which showed the linear, accurate, and durable operation of the proposed sensor. Finally, the sensor was put through its paces on the knee, elbow, and wrist of a female test subject. Also, to evaluate the pressure functionality of the sensor, a fully 3D active foot insole was developed, fabricated, and evaluated. All of the results show promising features for the proposed sensor to be used in real-world applications like rehabilitation, wearable devices, soft robotics, smart clothing, gait analysis, AR/VR, etc.