 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAI-Driven Acoustic Voice Biomarker-Based Hierarchical Classification of Benign Laryngeal Voice Disorders from Sustained Vowels
Dec 31, 2025Benign laryngeal voice disorders affect nearly one in five individuals and often manifest as dysphonia, while also serving as non-invasive indicators of broader physiological dysfunction. We introduce a clinically inspired hierarchical machine learning framework for automated classification of eight benign voice disorders alongside healthy controls, using acoustic features extracted from short, sustained vowel phonations. Experiments utilized 15,132 recordings from 1,261 speakers in the Saarbruecken Voice Database, covering vowels /a/, /i/, and /u/ at neutral, high, low, and gliding pitches. Mirroring clinical triage workflows, the framework operates in three sequential stages: Stage 1 performs binary screening of pathological versus non-pathological voices by integrating convolutional neural network-derived mel-spectrogram features with 21 interpretable acoustic biomarkers; Stage 2 stratifies voices into Healthy, Functional or Psychogenic, and Structural or Inflammatory groups using a cubic support vector machine; Stage 3 achieves fine-grained classification by incorporating probabilistic outputs from prior stages, improving discrimination of structural and inflammatory disorders relative to functional conditions. The proposed system consistently outperformed flat multi-class classifiers and pre-trained self-supervised models, including META HuBERT and Google HeAR, whose generic objectives are not optimized for sustained clinical phonation. By combining deep spectral representations with interpretable acoustic features, the framework enhances transparency and clinical alignment. These results highlight the potential of quantitative voice biomarkers as scalable, non-invasive tools for early screening, diagnostic triage, and longitudinal monitoring of vocal health.
Advanced XR-Based 6-DOF Catheter Tracking System for Immersive Cardiac Intervention Training
Nov 04, 2024



Extended Reality (XR) technologies are gaining traction as effective tools for medical training and procedural guidance, particularly in complex cardiac interventions. This paper presents a novel system for real-time 3D tracking and visualization of intracardiac echocardiography (ICE) catheters, with precise measurement of the roll angle. A custom 3D-printed setup, featuring orthogonal cameras, captures biplane video of the catheter, while a specialized computer vision algorithm reconstructs its 3D trajectory, localizing the tip with sub-millimeter accuracy and tracking the roll angle in real-time. The system's data is integrated into an interactive Unity-based environment, rendered through the Meta Quest 3 XR headset, combining a dynamically tracked catheter with a patient-specific 3D heart model. This immersive environment allows the testing of the importance of 3D depth perception, in comparison to 2D projections, as a form of visualization in XR. Our experimental study, conducted using the ICE catheter with six participants, suggests that 3D visualization is not necessarily beneficial over 2D views offered by the XR system; although all cardiologists saw its utility for pre-operative training, planning, and intra-operative guidance. The proposed system qualitatively shows great promise in transforming catheter-based interventions, particularly ICE procedures, by improving visualization, interactivity, and skill development.
Physics-Data Driven Machine Learning Based Model: A Hybrid Way for Nonlinear, Dynamic, and Open-loop Identification of IPMC Soft Artificial Muscles
Mar 03, 2022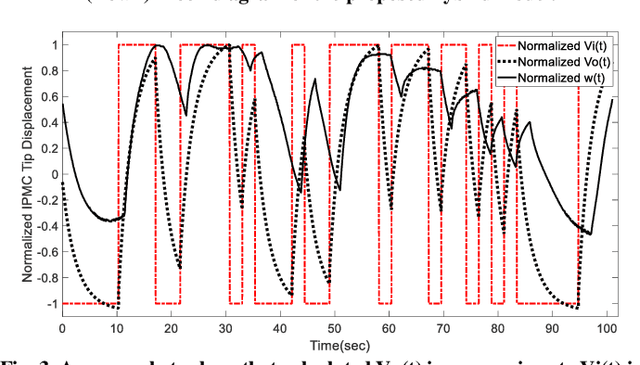
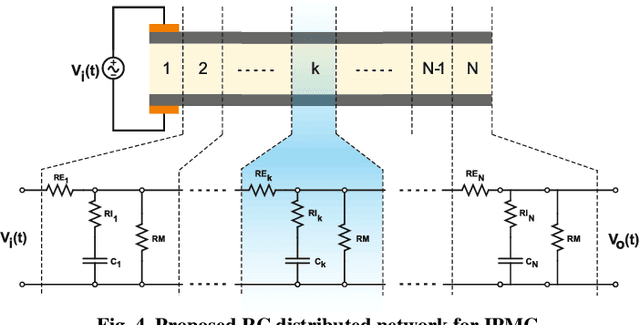
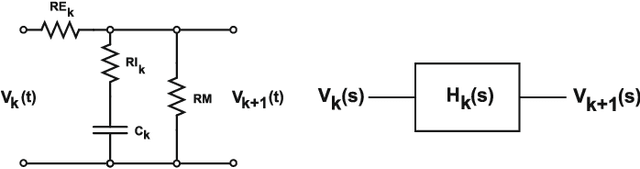
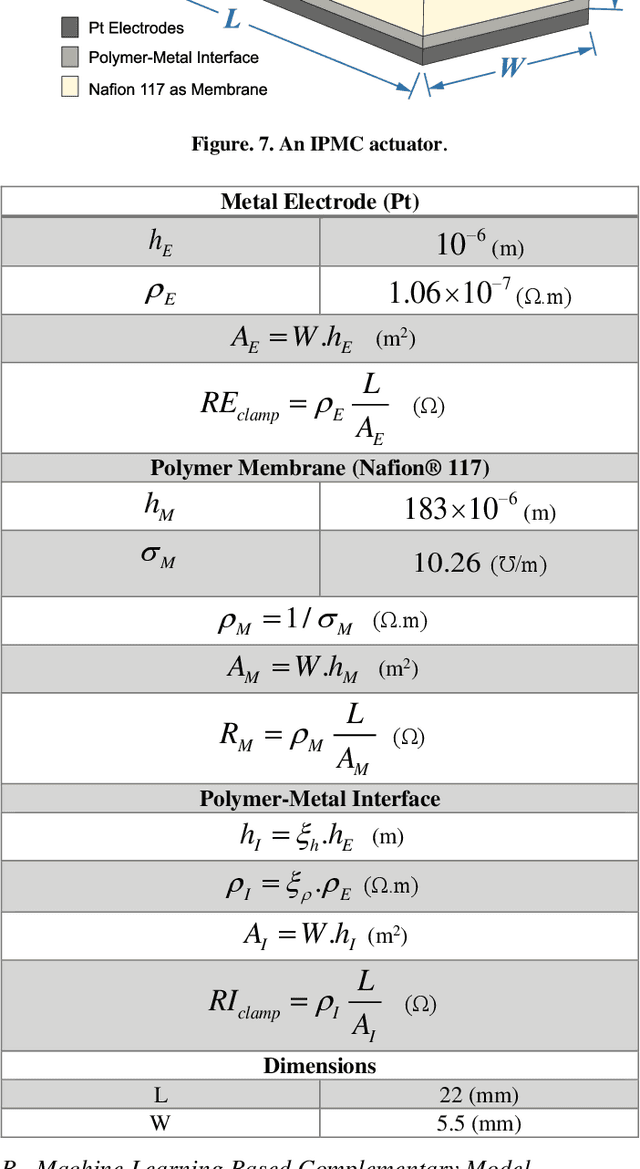
Ionic Polymer Metal Composites (IPMCs) are one of the most preferred choices among biocompatible materials for industrial and biomedical applications. Despite their advantages, some of their drawbacks include non-linear and hysteretic behavior, which complicates the modeling process. In previous works, usually autoregressive models were used to predict the behavior of an IPMC actuator. The main drawback of using an autoregressive model is that it cannot be used in mobile and real-time applications. In this study, we proposed a hybrid analytical intelligent model for an IPMC actuator. The most outstanding feature of this model is its non-autoregressive structure. The hybrid concept proposed in this study can be generalized to various problems other than IPMCs. The structure used in this work comprises an analytical model and a deep neural network, providing a non-linear, dynamic, and non-autoregressive model for the IPMC actuator. Lastly, the average NMSE achieved using the proposed hybrid model is 9.5781e-04 showing a significant drop in the error rate compared to other non-autoregressive structures.
A Plant-Inspired Multifunctional, Two Way, and Fiberless Soft Gripper with Sensorized Kinaesthesia
Mar 03, 2022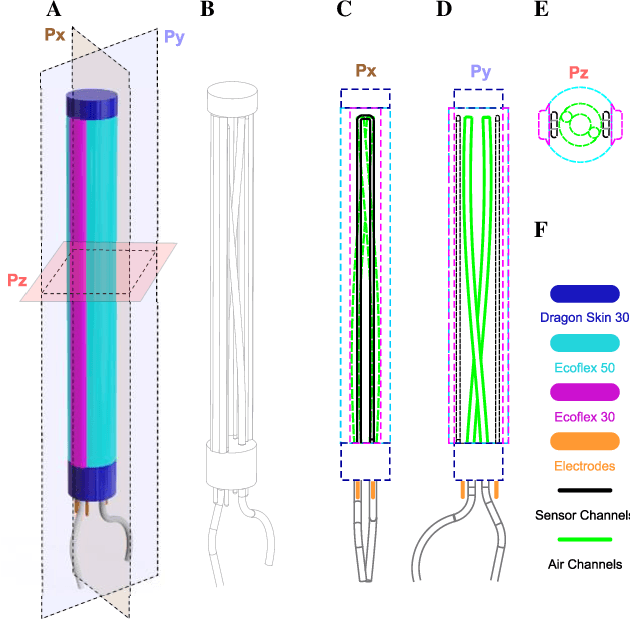
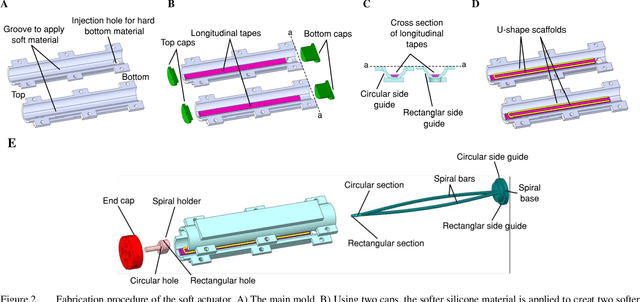
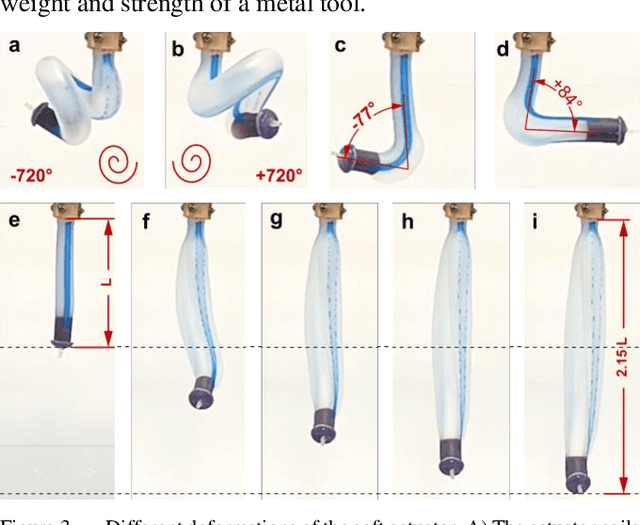

This work presents a new fiberless soft pneumatic actuator that can work multifunctional and bidirectional, and its embedded sensors give it a self-proprioception ability. This actuator works based on the idea of employing helical pressure channels. Applying the controlled input pressures into these two channels causes a variety of deformations and actuation. In particular, single pressure, imbalanced pressures, and balanced pressures applied in the channels cause bidirectional coilings, opposite bendings, and elongation, respectively, in a single unit actuator. Also, two U-shaped microchannels are created, and by injecting a gel-based conductive material, the actuator is equipped with resistive sensors which are responsive to a vast dynamic range from a small oscillation to a large elongation. This actuator has so many promising features as a multifunctional soft gripper, and its embedded soft sensors enable it to have better controllability in real problems. The multifunctionality of this actuator has been validated with several experimental tests, and also we have shown it has excellent potential in gripping a variety of objects. Finally, the embedded sensors can discriminate the main functions of actuators, and also they can play the role of independent sensors as well like a stretch, pressure, or bending sensors.
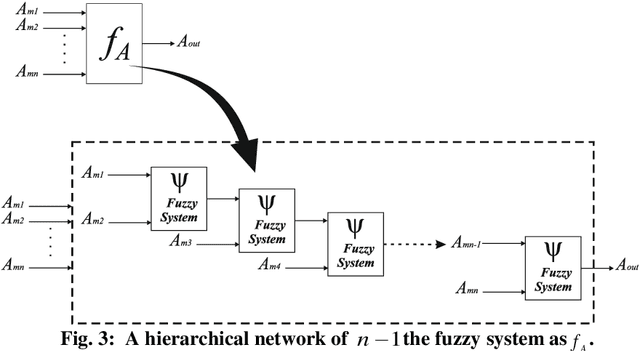
A new soft computing method for integration of expert's knowledge in reinforcement learn-ing problems
Jun 13, 2021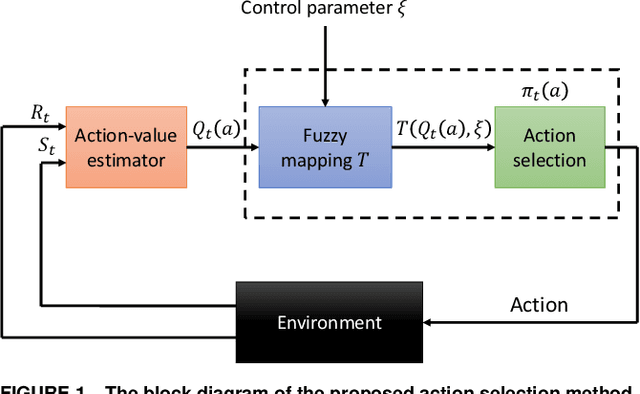
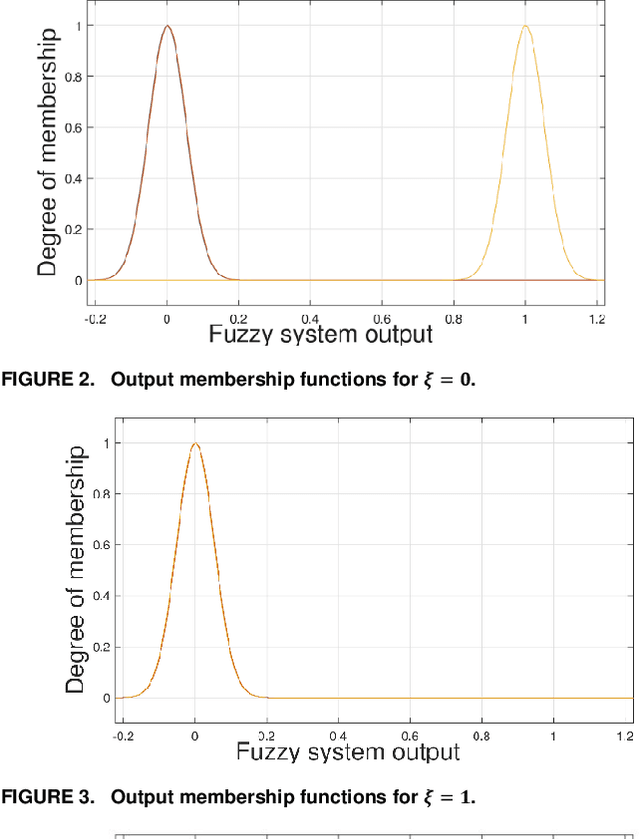
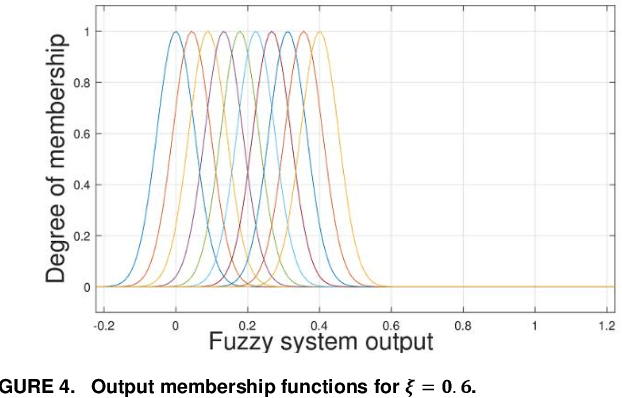
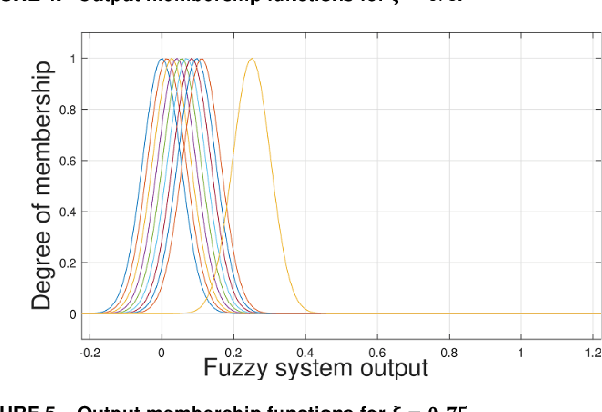
This paper proposes a novel fuzzy action selection method to leverage human knowledge in reinforcement learning problems. Based on the estimates of the most current action-state values, the proposed fuzzy nonlinear mapping as-signs each member of the action set to its probability of being chosen in the next step. A user tunable parameter is introduced to control the action selection policy, which determines the agent's greedy behavior throughout the learning process. This parameter resembles the role of the temperature parameter in the softmax action selection policy, but its tuning process can be more knowledge-oriented since this parameter reflects the human knowledge into the learning agent by making modifications in the fuzzy rule base. Simulation results indicate that including fuzzy logic within the reinforcement learning in the proposed manner improves the learning algorithm's convergence rate, and provides superior performance.
A novel fully 3D, microfluidic-oriented, gel-based and low cost stretchable soft sensor
Jun 13, 2021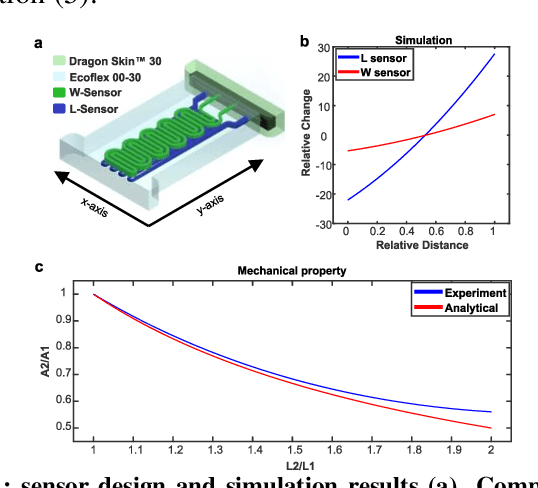
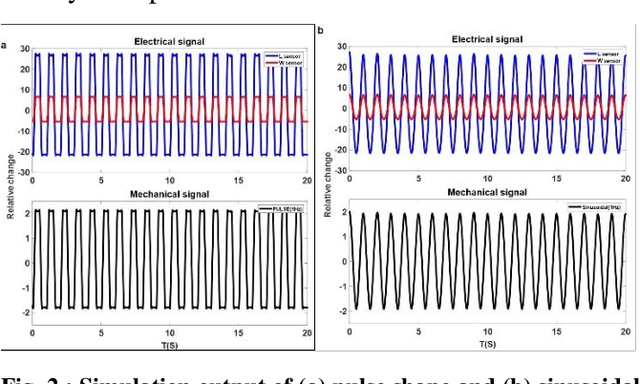
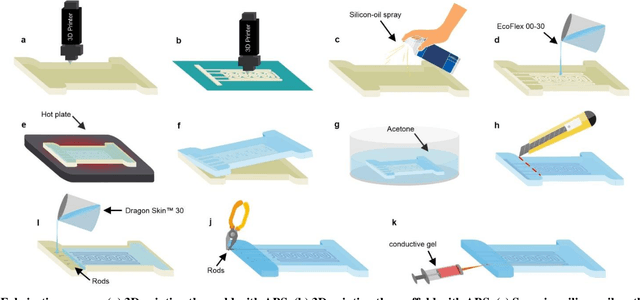
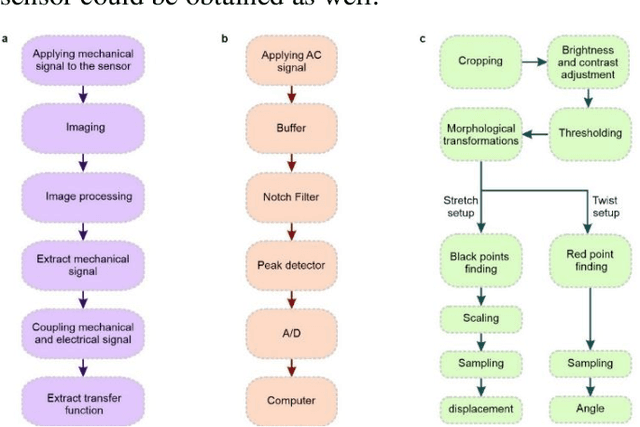
In this paper, a novel fully 3D, microfluidic-oriented, gel-based, and low-cost highly stretchable resistive sensors have been presented. By the proposed method we are able to measure and discriminate all of the stretch, twist, and pressure features by a single sensor which is the potential that we have obtained from the fully 3D structure of our sensor. Against previous sensors which all have used EGaIn as the conductive material of their sensor, we have used low-cost, safe, and ubiquitous glycol-based gel instead. To show the functionality of the proposed sensor some FEM simulations, a set of the designed experimental tests were done which showed the linear, accurate, and durable operation of the proposed sensor. Finally, the sensor was put through its paces on the knee, elbow, and wrist of a female test subject. Also, to evaluate the pressure functionality of the sensor, a fully 3D active foot insole was developed, fabricated, and evaluated. All of the results show promising features for the proposed sensor to be used in real-world applications like rehabilitation, wearable devices, soft robotics, smart clothing, gait analysis, AR/VR, etc.
Descriptive evaluation of students using fuzzy approximate reasoning
May 11, 2019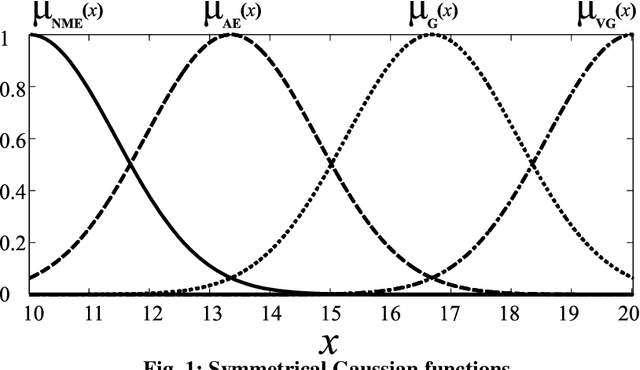
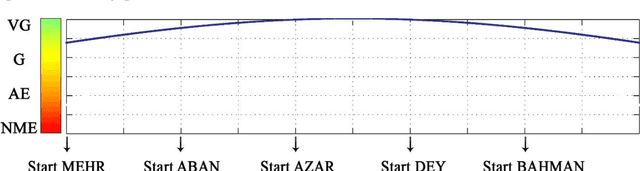
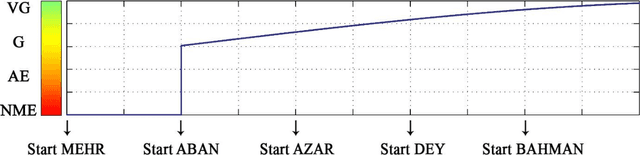
In recent years, descriptive evaluation has been introduced as a new model for educational evaluation of Iranian students. The current descriptive evaluation method is based on four-valued logic. Assessing all students with only four values is led to a lack of relative justice and the creation of unrealistic equality. Also, the complexity of the evaluation process in the current method increases teacher errors likelihood. As a suitable solution, in this paper, a fuzzy descriptive evaluation system has been proposed. The proposed method is based on fuzzy logic, which is an infinite-valued logic and it can perform approximate reasoning on natural language propositions. By the proposed fuzzy system, student assessment is performed over the school year with infinite values instead of four values. But to eliminate the diversity of assigned values to students, at the end of the school year, the calculated values for each student will be rounded to the nearest value of the four standard values of the current descriptive evaluation system. It can be implemented easily in an appropriate smartphone app, which makes it much easier for the teachers to evaluate the evaluation process. In this paper, the evaluation process of the elementary third-grade mathematics course in Iran during the period from the beginning of the MEHR (The Seventh month of Iran) to the end of BAHMAN (The Eleventh Month of Iran) is examined by the proposed system. To evaluate the validity of this system, the proposed method has been simulated in MATLAB software.
A knowledge-based intelligent system for control of dirt recognition process in the smart washing machines
May 07, 2019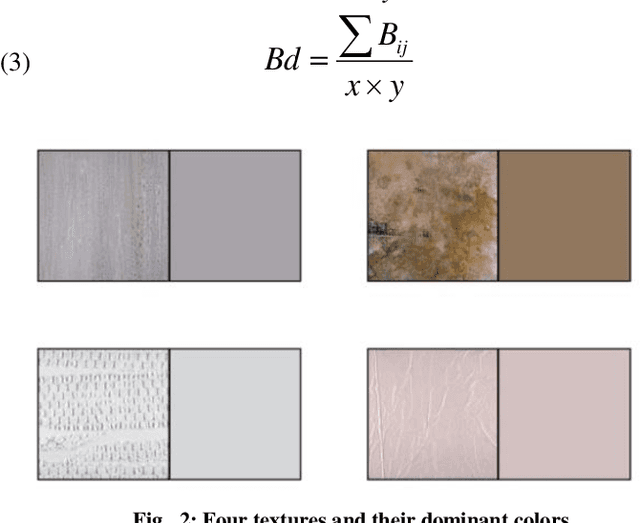
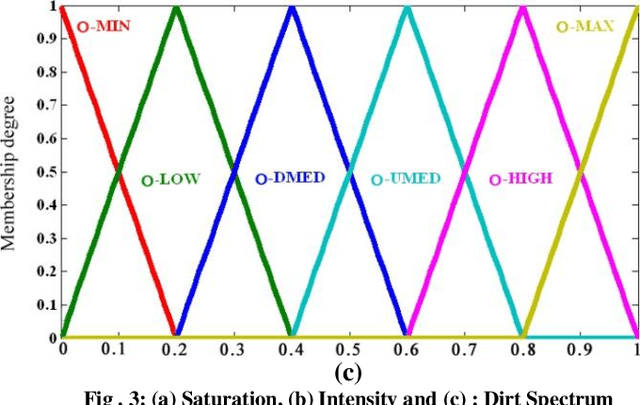
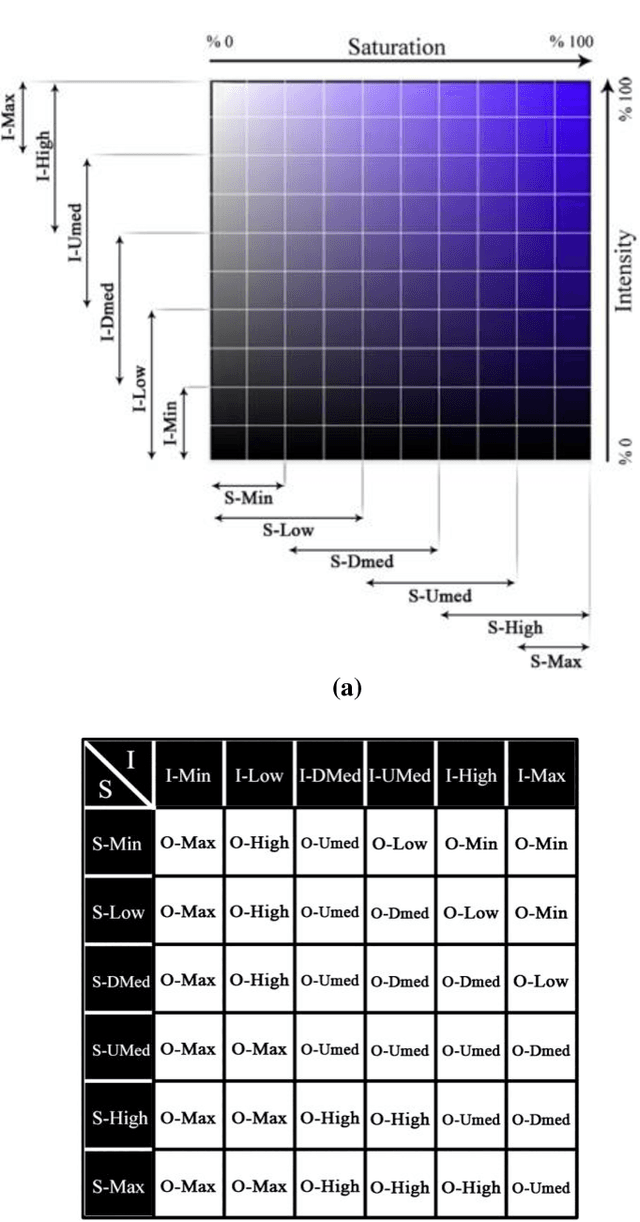
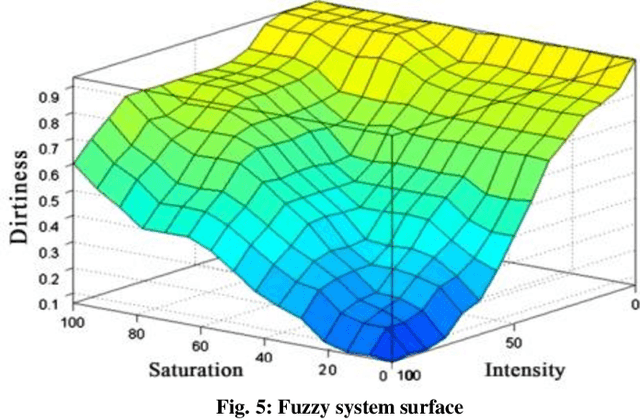
In this paper, we propose an intelligence approach based on fuzzy logic to modeling human intelligence in washing clothes. At first, an intelligent feedback loop is designed for perception-based sensing of dirt inspired by human color understanding. Then, when color stains leak out of some colored clothes the human probabilistic decision making is computationally modeled to detect this stain leakage and thus the problem of recognizing dirt from stain can be considered in the washing process. Finally, we discuss the fuzzy control of washing clothes and design and simulate a smart controller based on the fuzzy intelligence feedback loop.