 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDerivative-Based Mir Spectroscopy for Blood Glucose Estimation Using Pca-Driven Regression Models
Dec 10, 2024



In this study, we presented two innovative methods, which are Threshold-Based Derivative (TBD) and Adaptive Derivative Peak Detection(ADPD), that enhance the accuracy of Learning models for blood glucose estimation using Mid-Infrared (MIR) spectroscopy. In these presented methods, we have enhanced the model's accuracy by integrating absorbance data and its differentiation with critical points. Blood samples were characterized with Fourier Transform Infrared (FTIR) spectroscopy and advanced preprocessing steps. The learning models were Ridge Regression and Support Vector Regression(SVR) using Leave-One-out Cross-Validation. Results exhibited that TBD and ADPD significantly outperform basic used methods. For SVR, the TBD increased the r2 score by around 27%, and ADPD increased it by around 10%. these Ridge Regression values were between 36% and 24%. In addition, Results demonstrate that TBD and ADPD significantly outperform conventional methods, achieving lower error rates and improved clinical accuracy, validated through Clarke and Parkes Error Grid Analysis.
Physics-Data Driven Machine Learning Based Model: A Hybrid Way for Nonlinear, Dynamic, and Open-loop Identification of IPMC Soft Artificial Muscles
Mar 03, 2022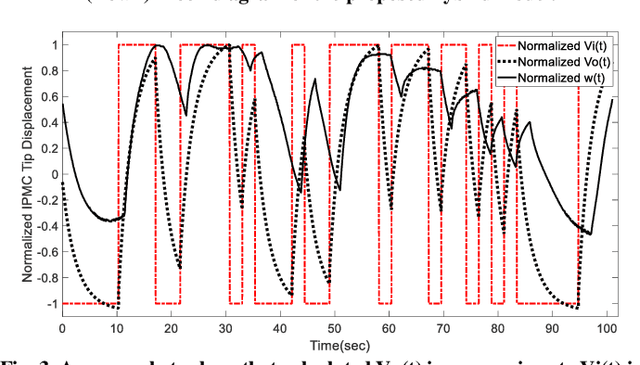
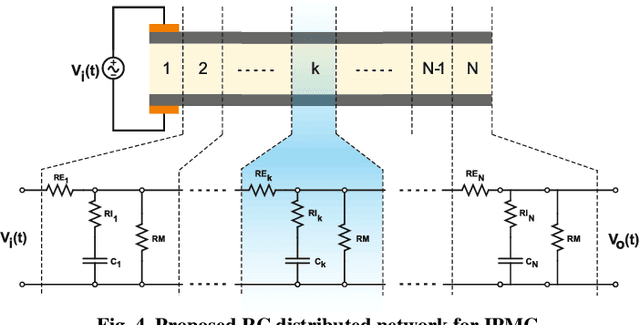
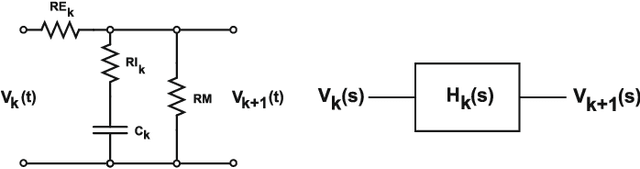
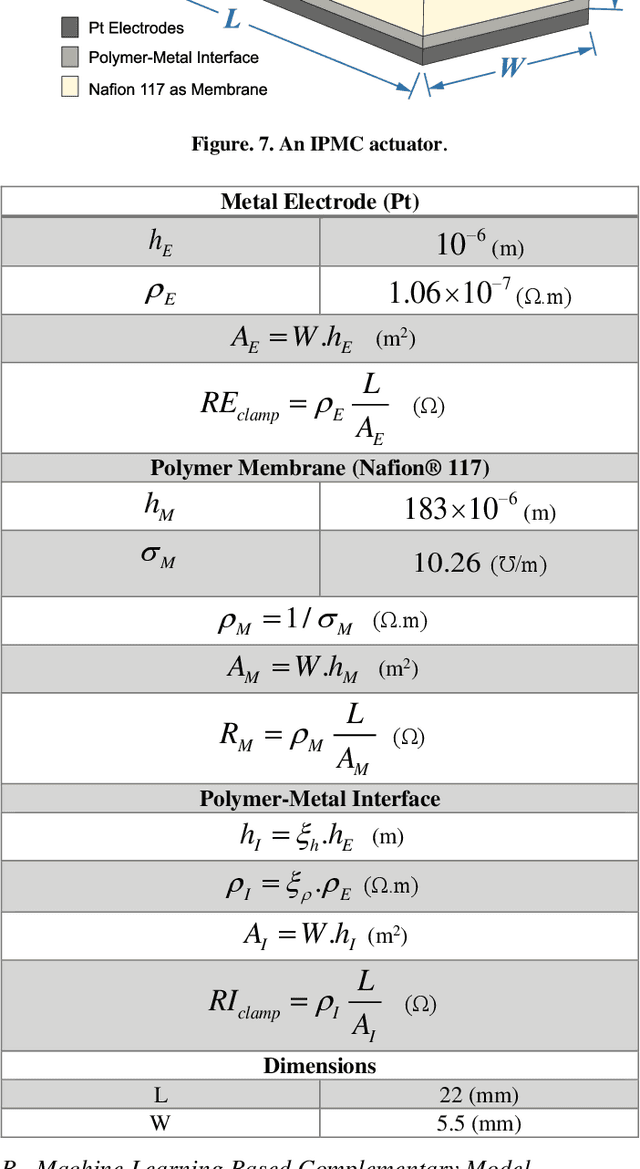
Ionic Polymer Metal Composites (IPMCs) are one of the most preferred choices among biocompatible materials for industrial and biomedical applications. Despite their advantages, some of their drawbacks include non-linear and hysteretic behavior, which complicates the modeling process. In previous works, usually autoregressive models were used to predict the behavior of an IPMC actuator. The main drawback of using an autoregressive model is that it cannot be used in mobile and real-time applications. In this study, we proposed a hybrid analytical intelligent model for an IPMC actuator. The most outstanding feature of this model is its non-autoregressive structure. The hybrid concept proposed in this study can be generalized to various problems other than IPMCs. The structure used in this work comprises an analytical model and a deep neural network, providing a non-linear, dynamic, and non-autoregressive model for the IPMC actuator. Lastly, the average NMSE achieved using the proposed hybrid model is 9.5781e-04 showing a significant drop in the error rate compared to other non-autoregressive structures.
A novel fully 3D, microfluidic-oriented, gel-based and low cost stretchable soft sensor
Jun 13, 2021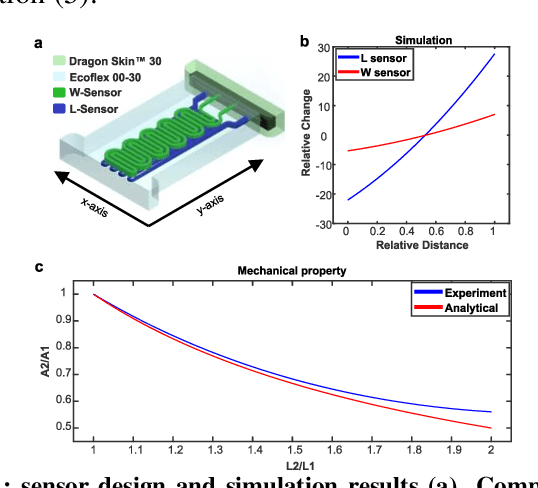
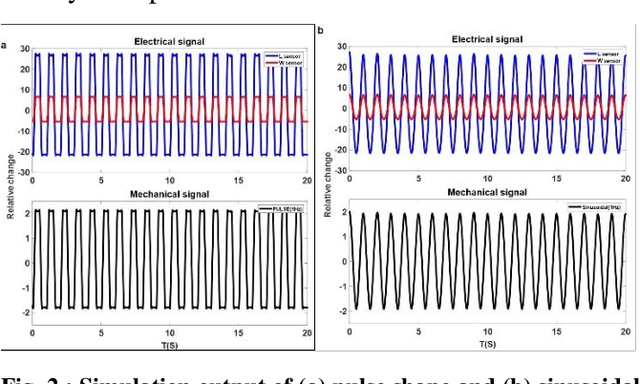
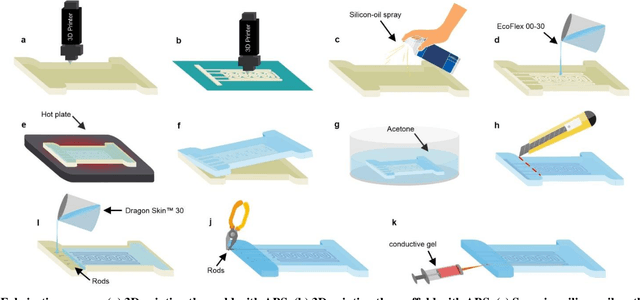
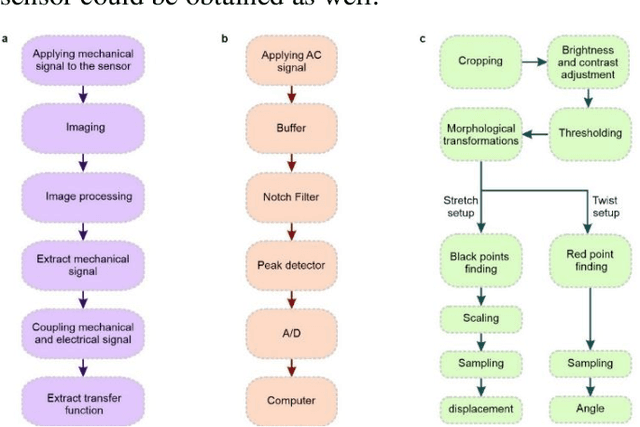
In this paper, a novel fully 3D, microfluidic-oriented, gel-based, and low-cost highly stretchable resistive sensors have been presented. By the proposed method we are able to measure and discriminate all of the stretch, twist, and pressure features by a single sensor which is the potential that we have obtained from the fully 3D structure of our sensor. Against previous sensors which all have used EGaIn as the conductive material of their sensor, we have used low-cost, safe, and ubiquitous glycol-based gel instead. To show the functionality of the proposed sensor some FEM simulations, a set of the designed experimental tests were done which showed the linear, accurate, and durable operation of the proposed sensor. Finally, the sensor was put through its paces on the knee, elbow, and wrist of a female test subject. Also, to evaluate the pressure functionality of the sensor, a fully 3D active foot insole was developed, fabricated, and evaluated. All of the results show promising features for the proposed sensor to be used in real-world applications like rehabilitation, wearable devices, soft robotics, smart clothing, gait analysis, AR/VR, etc.