 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReconciling distributed compliance with high-performance control in continuum soft robotics
Mar 17, 2026High-performance closed-loop control of truly soft continuum manipulators has remained elusive. Experimental demonstrations have largely relied on sufficiently stiff, piecewise architectures in which each actuated segment behaves as a distributed yet effectively rigid element, while deformation modes beyond simple bending are suppressed. This strategy simplifies modeling and control, but sidesteps the intrinsic complexity of a fully compliant body and makes the system behave as a serial kinematic chain, much like a conventional articulated robot. An implicit conclusion has consequently emerged within the community: distributed softness and dynamic precision are incompatible. Here we show this trade-off is not fundamental. We present a highly compliant, fully continuum robotic arm - without hardware discretization or stiffness-based mode suppression - that achieves fast, precise task-space convergence under dynamic conditions. The platform integrates direct-drive actuation, a tendon routing scheme enabling coupled bending and twisting, and a structured nonlinear control architecture grounded in reduced-order strain modeling of underactuated systems. Modeling, actuation, and control are co-designed to preserve essential mechanical complexity while enabling high-bandwidth loop closure. Experiments demonstrate accurate, repeatable execution of dynamic Cartesian tasks, including fast positioning and interaction. The proposed system achieves the fastest reported task-execution speed among soft robots. At millimetric precision, execution speed increases nearly fourfold compared with prior approaches, while operating on a fully compliant continuum body. These results show that distributed compliance and high-performance dynamic control can coexist, opening a path toward truly soft manipulators approaching the operational capabilities of rigid robots without sacrificing morphological richness.
SENSE-STEP: Learning Sim-to-Real Locomotion for a Sensory-Enabled Soft Quadruped Robot
Feb 13, 2026Robust closed-loop locomotion remains challenging for soft quadruped robots due to high-dimensional dynamics, actuator hysteresis, and difficult-to-model contact interactions, while conventional proprioception provides limited information about ground contact. In this paper, we present a learning-based control framework for a pneumatically actuated soft quadruped equipped with tactile suction-cup feet, and we validate the approach experimentally on physical hardware. The control policy is trained in simulation through a staged learning process that starts from a reference gait and is progressively refined under randomized environmental conditions. The resulting controller maps proprioceptive and tactile feedback to coordinated pneumatic actuation and suction-cup commands, enabling closed-loop locomotion on flat and inclined surfaces. When deployed on the real robot, the closed-loop policy outperforms an open-loop baseline, increasing forward speed by 41% on a flat surface and by 91% on a 5-degree incline. Ablation studies further demonstrate the role of tactile force estimates and inertial feedback in stabilizing locomotion, with performance improvements of up to 56% compared to configurations without sensory feedback.
3D Printable Gradient Lattice Design for Multi-Stiffness Robotic Fingers
Jan 07, 2025



Human fingers achieve exceptional dexterity and adaptability by combining structures with varying stiffness levels, from soft tissues (low) to tendons and cartilage (medium) to bones (high). This paper explores developing a robotic finger with similar multi-stiffness characteristics. Specifically, we propose using a lattice configuration, parameterized by voxel size and unit cell geometry, to optimize and achieve fine-tuned stiffness properties with high granularity. A significant advantage of this approach is the feasibility of 3D printing the designs in a single process, eliminating the need for manual assembly of elements with differing stiffness. Based on this method, we present a novel, human-like finger, and a soft gripper. We integrate the latter with a rigid manipulator and demonstrate the effectiveness in pick and place tasks.
Mastering Contact-rich Tasks by Combining Soft and Rigid Robotics with Imitation Learning
Oct 10, 2024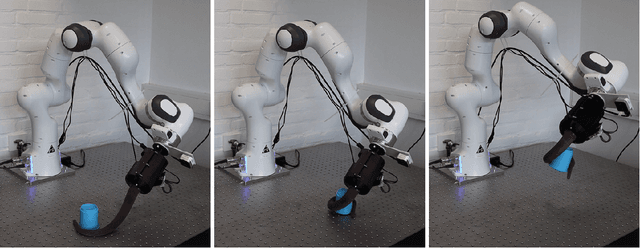
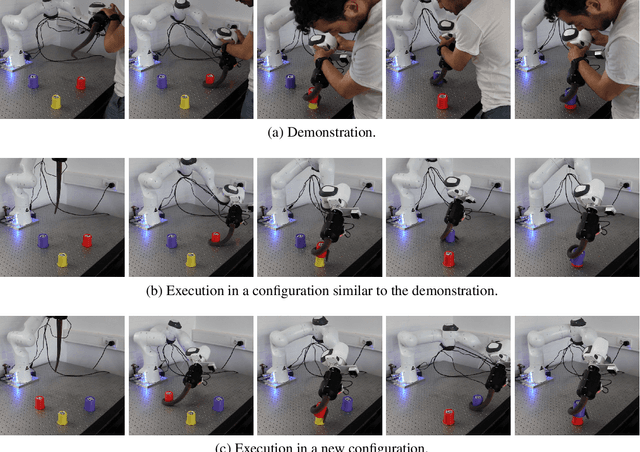
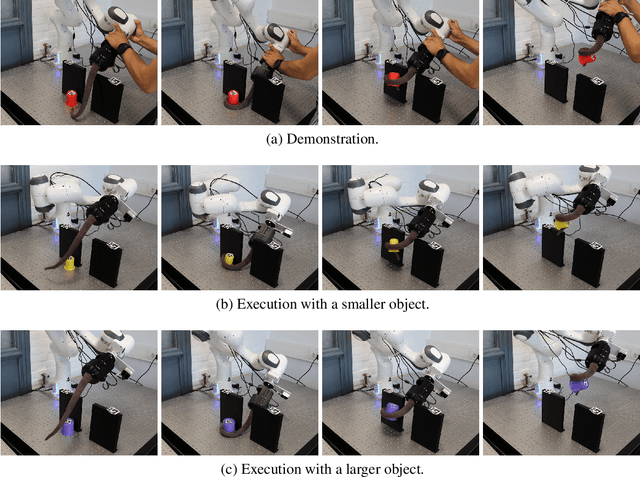

Soft robots have the potential to revolutionize the use of robotic systems with their capability of establishing safe, robust, and adaptable interactions with their environment, but their precise control remains challenging. In contrast, traditional rigid robots offer high accuracy and repeatability but lack the flexibility of soft robots. We argue that combining these characteristics in a hybrid robotic platform can significantly enhance overall capabilities. This work presents a novel hybrid robotic platform that integrates a rigid manipulator with a fully developed soft arm. This system is equipped with the intelligence necessary to perform flexible and generalizable tasks through imitation learning autonomously. The physical softness and machine learning enable our platform to achieve highly generalizable skills, while the rigid components ensure precision and repeatability.
Berry Twist: a Twisting-Tube Soft Robotic Gripper for Blackberry Harvesting
Mar 25, 2024



As global demand for fruits and vegetables continues to rise, the agricultural industry faces challenges in securing adequate labor. Robotic harvesting devices offer a promising solution to solve this issue. However, harvesting delicate fruits, notably blackberries, poses unique challenges due to their fragility. This study introduces and evaluates a prototype robotic gripper specifically designed for blackberry harvesting. The gripper features an innovative fabric tube mechanism employing motorized twisting action to gently envelop the fruit, ensuring uniform pressure application and minimizing damage. Three types of tubes were developed, varying in elasticity and compressibility using foam padding, spandex, and food-safe cotton cheesecloth. Performance testing focused on assessing each gripper's ability to detach and release blackberries, with emphasis on quantifying damage rates. Results indicate the proposed gripper achieved an 82% success rate in detaching blackberries and a 95% success rate in releasing them, showcasing the promised potential for robotic harvesting applications.