 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMastering Contact-rich Tasks by Combining Soft and Rigid Robotics with Imitation Learning
Oct 10, 2024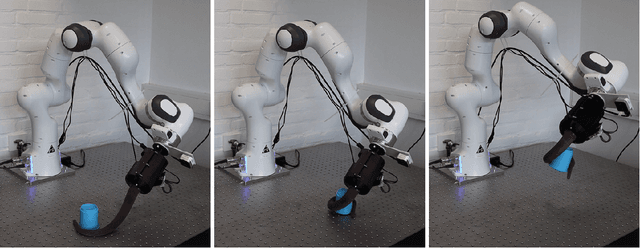
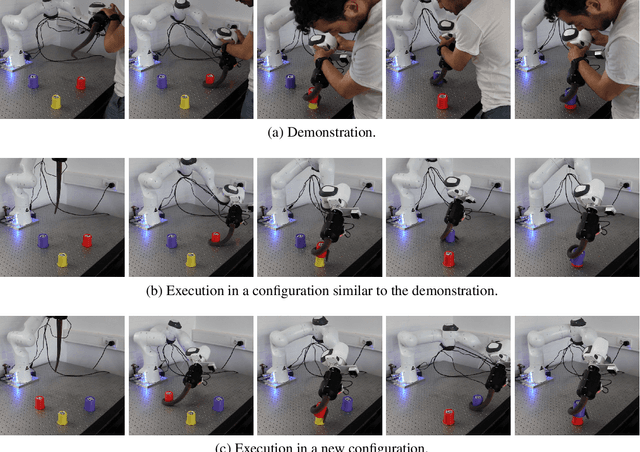
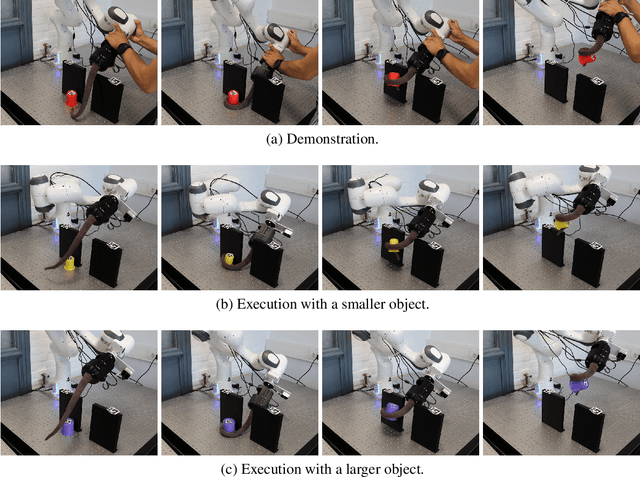

Soft robots have the potential to revolutionize the use of robotic systems with their capability of establishing safe, robust, and adaptable interactions with their environment, but their precise control remains challenging. In contrast, traditional rigid robots offer high accuracy and repeatability but lack the flexibility of soft robots. We argue that combining these characteristics in a hybrid robotic platform can significantly enhance overall capabilities. This work presents a novel hybrid robotic platform that integrates a rigid manipulator with a fully developed soft arm. This system is equipped with the intelligence necessary to perform flexible and generalizable tasks through imitation learning autonomously. The physical softness and machine learning enable our platform to achieve highly generalizable skills, while the rigid components ensure precision and repeatability.
MROS: A framework for robot self-adaptation
Mar 16, 2023Self-adaptation can be used in robotics to increase system robustness and reliability. This work describes the Metacontrol method for self-adaptation in robotics. Particularly, it details how the MROS (Metacontrol for ROS Systems) framework implements and packages Metacontrol, and it demonstrate how MROS can be applied in a navigation scenario where a mobile robot navigates in a factory floor. Video: https://www.youtube.com/watch?v=ISe9aMskJuE