 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeROBUST: 221 Bugs in the Robot Operating System
Apr 04, 2024As robotic systems such as autonomous cars and delivery drones assume greater roles and responsibilities within society, the likelihood and impact of catastrophic software failure within those systems is increased.To aid researchers in the development of new methods to measure and assure the safety and quality of robotics software, we systematically curated a dataset of 221 bugs across 7 popular and diverse software systems implemented via the Robot Operating System (ROS). We produce historically accurate recreations of each of the 221 defective software versions in the form of Docker images, and use a grounded theory approach to examine and categorize their corresponding faults, failures, and fixes. Finally, we reflect on the implications of our findings and outline future research directions for the community.
MROS: A framework for robot self-adaptation
Mar 16, 2023Self-adaptation can be used in robotics to increase system robustness and reliability. This work describes the Metacontrol method for self-adaptation in robotics. Particularly, it details how the MROS (Metacontrol for ROS Systems) framework implements and packages Metacontrol, and it demonstrate how MROS can be applied in a navigation scenario where a mobile robot navigates in a factory floor. Video: https://www.youtube.com/watch?v=ISe9aMskJuE
MROS: Runtime Adaptation For Robot Control Architectures
Oct 19, 2020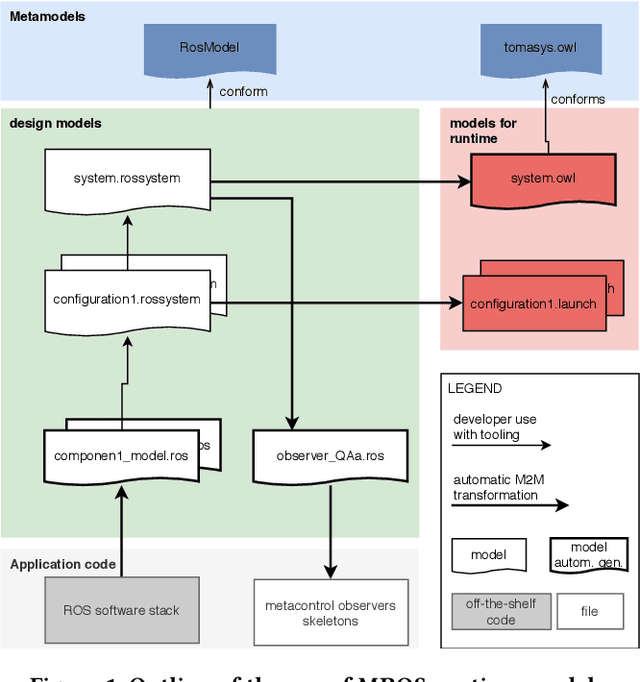

Known attempts to build autonomous robots rely on complex control architectures, often implemented with the Robot Operating System platform (ROS). These architectures need to be dynamically adaptable in order to cope with changing environment conditions, new mission requirements or component failures. The implementation of adaptable architectures is very often ad hoc, quickly gets cumbersome and expensive. We present a structured model-based framework for the adaptation of robot control architectures at run-time to satisfy set quality requirements. We use a formal meta-model to represent the configuration space of control architectures and the corresponding mission requirements. The meta-model is implemented as an OWL ontology with SWRL rules, enabling the use of an off-the-shelf reasoner for diagnostics and adaptation. The method is discussed and evaluated using two case studies of real, ROS-based systems: (i) for an autonomous dual arm mobile manipulator building a pyramid and (ii) a mobile robot navigating in a factory environment.