 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeROBUST: 221 Bugs in the Robot Operating System
Apr 04, 2024As robotic systems such as autonomous cars and delivery drones assume greater roles and responsibilities within society, the likelihood and impact of catastrophic software failure within those systems is increased.To aid researchers in the development of new methods to measure and assure the safety and quality of robotics software, we systematically curated a dataset of 221 bugs across 7 popular and diverse software systems implemented via the Robot Operating System (ROS). We produce historically accurate recreations of each of the 221 defective software versions in the form of Docker images, and use a grounded theory approach to examine and categorize their corresponding faults, failures, and fixes. Finally, we reflect on the implications of our findings and outline future research directions for the community.
RedBit: An End-to-End Flexible Framework for Evaluating the Accuracy of Quantized CNNs
Jan 15, 2023In recent years, Convolutional Neural Networks (CNNs) have become the standard class of deep neural network for image processing, classification and segmentation tasks. However, the large strides in accuracy obtained by CNNs have been derived from increasing the complexity of network topologies, which incurs sizeable performance and energy penalties in the training and inference of CNNs. Many recent works have validated the effectiveness of parameter quantization, which consists in reducing the bit width of the network's parameters, to enable the attainment of considerable performance and energy efficiency gains without significantly compromising accuracy. However, it is difficult to compare the relative effectiveness of different quantization methods. To address this problem, we introduce RedBit, an open-source framework that provides a transparent, extensible and easy-to-use interface to evaluate the effectiveness of different algorithms and parameter configurations on network accuracy. We use RedBit to perform a comprehensive survey of five state-of-the-art quantization methods applied to the MNIST, CIFAR-10 and ImageNet datasets. We evaluate a total of 2300 individual bit width combinations, independently tuning the width of the network's weight and input activation parameters, from 32 bits down to 1 bit (e.g., 8/8, 2/2, 1/32, 1/1, for weights/activations). Upwards of 20000 hours of computing time in a pool of state-of-the-art GPUs were used to generate all the results in this paper. For 1-bit quantization, the accuracy losses for the MNIST, CIFAR-10 and ImageNet datasets range between [0.26%, 0.79%], [9.74%, 32.96%] and [10.86%, 47.36%] top-1, respectively. We actively encourage the reader to download the source code and experiment with RedBit, and to submit their own observed results to our public repository, available at https://github.com/IT-Coimbra/RedBit.
Robotic Learning the Sequence of Packing Irregular Objects from Human Demonstrations
Oct 04, 2022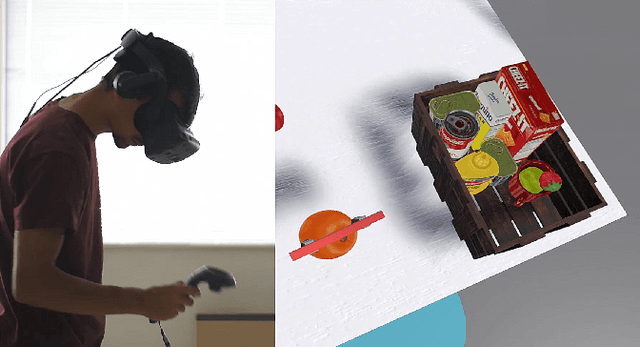

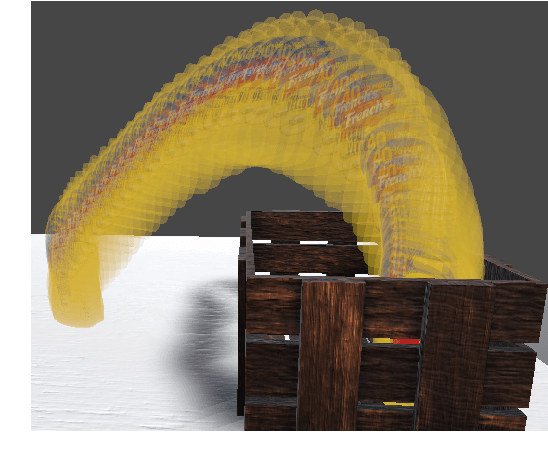
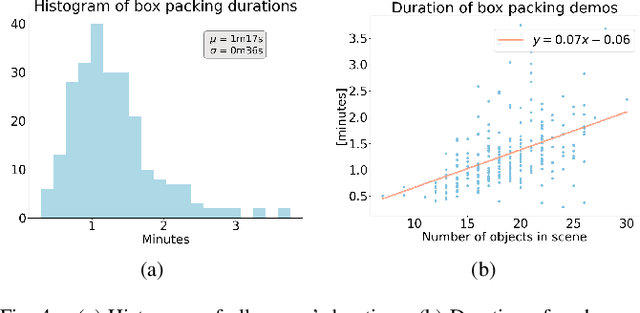
We address the unsolved task of robotic bin packing with irregular objects, such as groceries, where the underlying constraints on object placement and manipulation, and the diverse objects' physical properties make preprogrammed strategies unfeasible. Our approach is to learn directly from expert demonstrations in order to extract implicit task knowledge and strategies to achieve an efficient space usage, safe object positioning and to generate human-like behaviors that enhance human-robot trust. We collect and make available a novel and diverse dataset, BoxED, of box packing demonstrations by humans in virtual reality. In total, 263 boxes were packed with supermarket-like objects by 43 participants, yielding 4644 object manipulations. We use the BoxED dataset to learn a Markov chain to predict the object packing sequence for a given set of objects and compare it with human performance. Our experimental results show that the model surpasses human performance by generating sequence predictions that humans classify as human-like more frequently than human-generated sequences.
The High-Assurance ROS Framework
Mar 02, 2021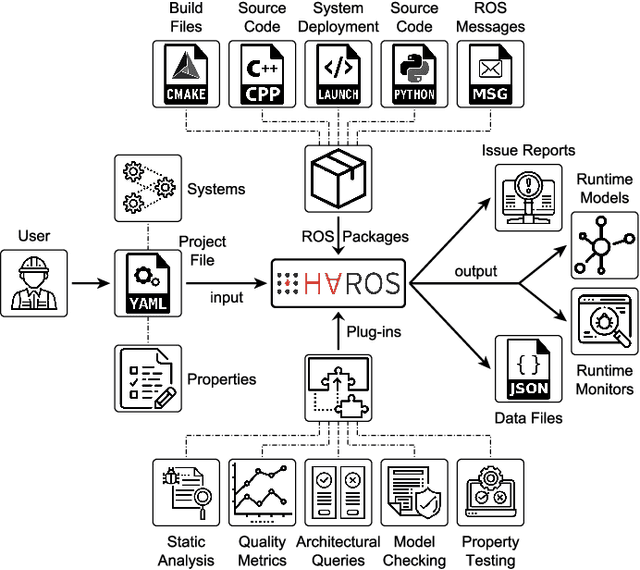
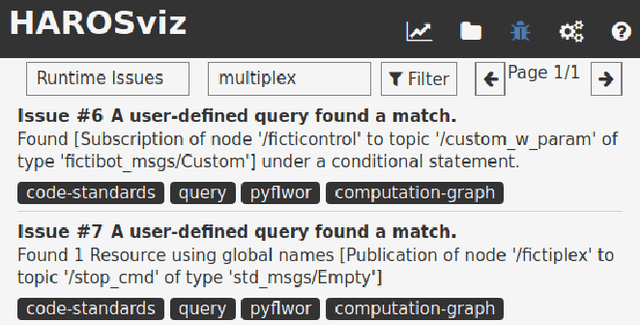
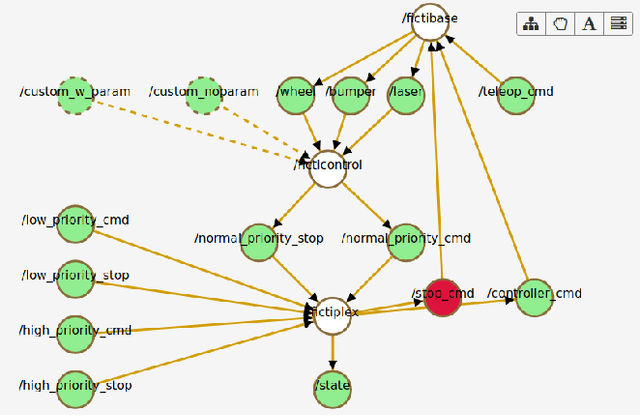
This tool paper presents the High-Assurance ROS (HAROS) framework. HAROS is a framework for the analysis and quality improvement of robotics software developed using the popular Robot Operating System (ROS). It builds on a static analysis foundation to automatically extract models from the source code. Such models are later used to enable other sorts of analyses, such as Model Checking, Runtime Verification, and Property-based Testing. It has been applied to multiple real-world examples, helping developers find and correct various issues.