 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Learning the Sequence of Packing Irregular Objects from Human Demonstrations
Paper and Code
Oct 04, 2022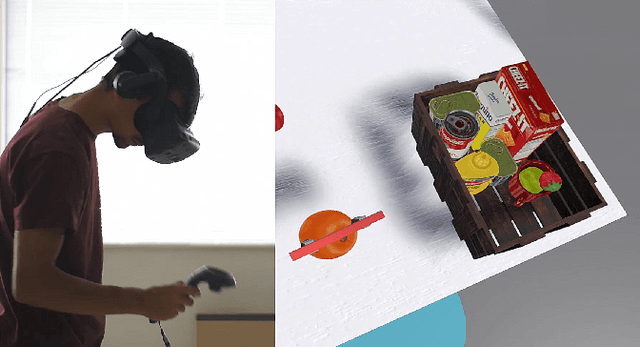

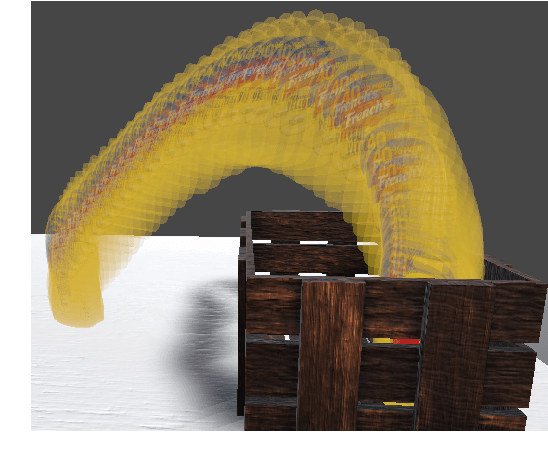
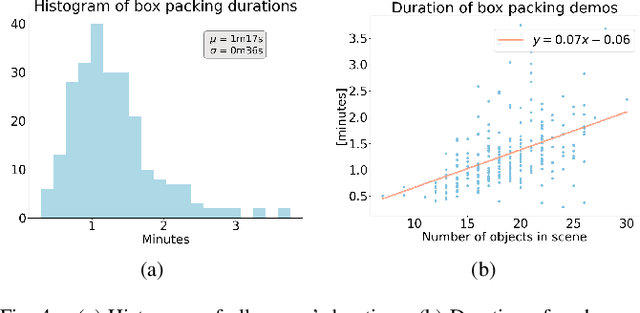
We address the unsolved task of robotic bin packing with irregular objects, such as groceries, where the underlying constraints on object placement and manipulation, and the diverse objects' physical properties make preprogrammed strategies unfeasible. Our approach is to learn directly from expert demonstrations in order to extract implicit task knowledge and strategies to achieve an efficient space usage, safe object positioning and to generate human-like behaviors that enhance human-robot trust. We collect and make available a novel and diverse dataset, BoxED, of box packing demonstrations by humans in virtual reality. In total, 263 boxes were packed with supermarket-like objects by 43 participants, yielding 4644 object manipulations. We use the BoxED dataset to learn a Markov chain to predict the object packing sequence for a given set of objects and compare it with human performance. Our experimental results show that the model surpasses human performance by generating sequence predictions that humans classify as human-like more frequently than human-generated sequences.