 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Hazard Identification to Controller Design: Proactive and LLM-Supported Safety Engineering for ML-Powered Systems
Feb 11, 2025



Machine learning (ML) components are increasingly integrated into software products, yet their complexity and inherent uncertainty often lead to unintended and hazardous consequences, both for individuals and society at large. Despite these risks, practitioners seldom adopt proactive approaches to anticipate and mitigate hazards before they occur. Traditional safety engineering approaches, such as Failure Mode and Effects Analysis (FMEA) and System Theoretic Process Analysis (STPA), offer systematic frameworks for early risk identification but are rarely adopted. This position paper advocates for integrating hazard analysis into the development of any ML-powered software product and calls for greater support to make this process accessible to developers. By using large language models (LLMs) to partially automate a modified STPA process with human oversight at critical steps, we expect to address two key challenges: the heavy dependency on highly experienced safety engineering experts, and the time-consuming, labor-intensive nature of traditional hazard analysis, which often impedes its integration into real-world development workflows. We illustrate our approach with a running example, demonstrating that many seemingly unanticipated issues can, in fact, be anticipated.
Understanding Misconfigurations in ROS: An Empirical Study and Current Approaches
Jul 27, 2024
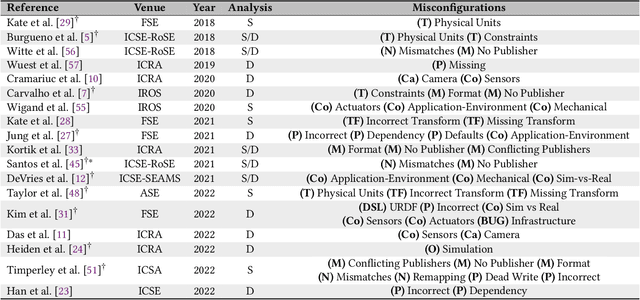
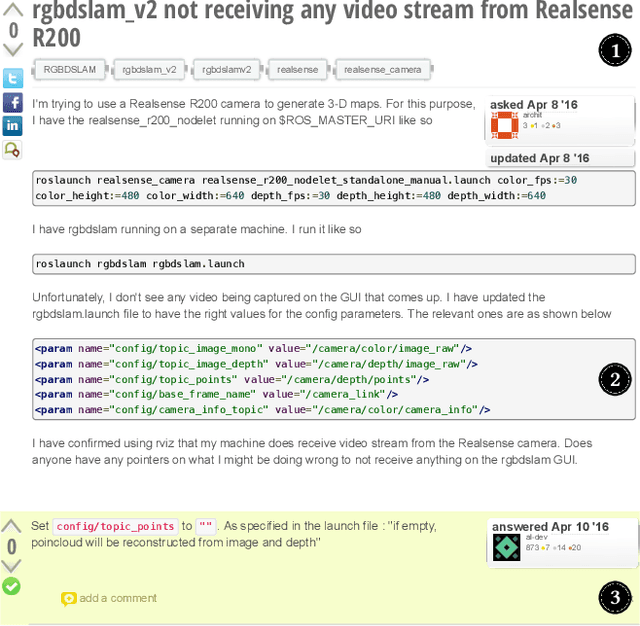
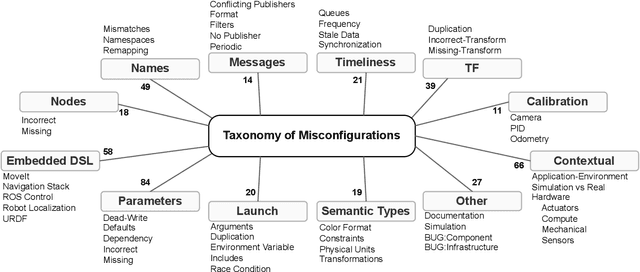
The Robot Operating System (ROS) is a popular framework and ecosystem that allows developers to build robot software systems from reusable, off-the-shelf components. Systems are often built by customizing and connecting components via configuration files. While reusable components theoretically allow rapid prototyping, ensuring proper configuration and connection is challenging, as evidenced by numerous questions on developer forums. Developers must abide to the often unchecked and unstated assumptions of individual components. Failure to do so can result in misconfigurations that are only discovered during field deployment, at which point errors may lead to unpredictable and dangerous behavior. Despite misconfigurations having been studied in the broader context of software engineering, robotics software (and ROS in particular) poses domain-specific challenges with potentially disastrous consequences. To understand and improve the reliability of ROS projects, it is critical to identify the types of misconfigurations faced by developers. To that end, we perform a study of ROS Answers, a Q&A platform, to identify and categorize misconfigurations that occur during ROS development. We then conduct a literature review to assess the coverage of these misconfigurations by existing detection techniques. In total, we find 12 high-level categories and 50 sub-categories of misconfigurations. Of these categories, 27 are not covered by existing techniques. To conclude, we discuss how to tackle those misconfigurations in future work.
ROBUST: 221 Bugs in the Robot Operating System
Apr 04, 2024As robotic systems such as autonomous cars and delivery drones assume greater roles and responsibilities within society, the likelihood and impact of catastrophic software failure within those systems is increased.To aid researchers in the development of new methods to measure and assure the safety and quality of robotics software, we systematically curated a dataset of 221 bugs across 7 popular and diverse software systems implemented via the Robot Operating System (ROS). We produce historically accurate recreations of each of the 221 defective software versions in the form of Docker images, and use a grounded theory approach to examine and categorize their corresponding faults, failures, and fixes. Finally, we reflect on the implications of our findings and outline future research directions for the community.
GzScenic: Automatic Scene Generation for Gazebo Simulator
Apr 17, 2021



Testing robotic and cyberphysical systems in simulation require specifications of the simulated environments (i.e., scenes). The Scenic domain-specific language provides a high-level probabilistic programming language that allows users to specify scenarios for simulation. Scenic automatically generates concrete scenes that can be rendered by simulators. However, Scenic is mainly designed for autonomous vehicle simulation and does not support the most popular general-purpose simulator: Gazebo. In this work, we present GzScenic; a tool that automatically generates scenes for simulation in Gazebo. GzScenic automatically generates both the models required for running Scenic on the scenarios, and the models that Gazebo requires for running the simulation.
A Study on the Challenges of Using Robotics Simulators for Testing
Apr 15, 2020



Robotics simulation plays an important role in the design, development, and verification and validation of robotic systems. Recent studies have shown that simulation may be used as a cheaper, safer, and more reliable alternative to manual, and widely used, process of field testing. This is particularly important in the context of continuous integration pipelines, where integrated automated testing is key to reducing costs while maintaining system safety. However, simulation and automated testing are not seeing the degree of widespread adoption in practice that their potential would motivate. Our goal in this paper is to develop a principled understanding of the ways developers use simulation in their process, and the challenges they face in doing so. This type of understanding can guide the development of more effective simulators and testing techniques for modern robotics development. To that end, we conduct a survey of 82 robotics developers from a diversity of backgrounds that addresses the current capabilities and limits of simulation technology in practice. We find that simulation is used by 85% of our participants for testing, and that many participants desire to use simulation as part of their test automation. We identify 10 high-level challenges that impede developers from using simulation for manual and automated testing, and general purposes. These challenges include the gap between simulation and reality, a lack of reproducibility, and considerable resource costs associated with using simulators. Finally, we outline avenues for improvement in the development of new simulators that can help simulation reach its potential as a means of verification and validation.