 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderstanding Misconfigurations in ROS: An Empirical Study and Current Approaches
Jul 27, 2024
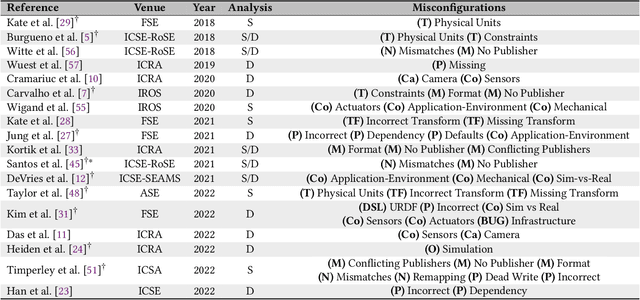
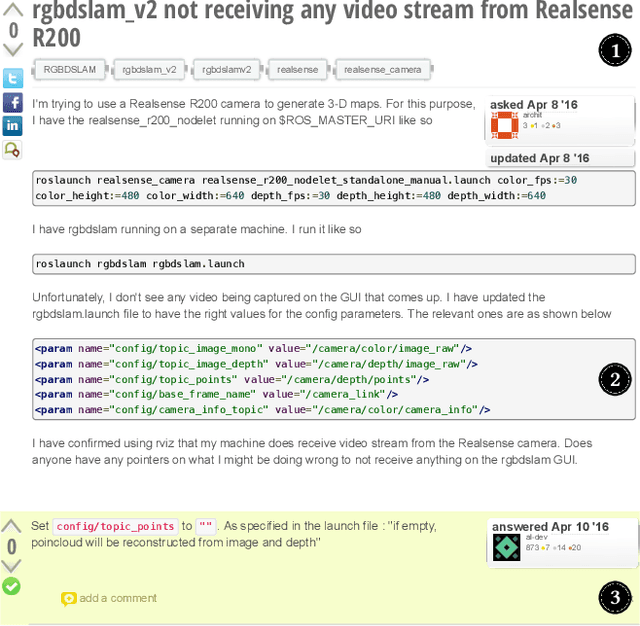
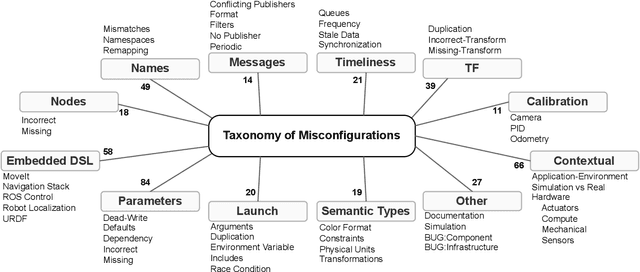
The Robot Operating System (ROS) is a popular framework and ecosystem that allows developers to build robot software systems from reusable, off-the-shelf components. Systems are often built by customizing and connecting components via configuration files. While reusable components theoretically allow rapid prototyping, ensuring proper configuration and connection is challenging, as evidenced by numerous questions on developer forums. Developers must abide to the often unchecked and unstated assumptions of individual components. Failure to do so can result in misconfigurations that are only discovered during field deployment, at which point errors may lead to unpredictable and dangerous behavior. Despite misconfigurations having been studied in the broader context of software engineering, robotics software (and ROS in particular) poses domain-specific challenges with potentially disastrous consequences. To understand and improve the reliability of ROS projects, it is critical to identify the types of misconfigurations faced by developers. To that end, we perform a study of ROS Answers, a Q&A platform, to identify and categorize misconfigurations that occur during ROS development. We then conduct a literature review to assess the coverage of these misconfigurations by existing detection techniques. In total, we find 12 high-level categories and 50 sub-categories of misconfigurations. Of these categories, 27 are not covered by existing techniques. To conclude, we discuss how to tackle those misconfigurations in future work.
CURE: Simulation-Augmented Auto-Tuning in Robotics
Feb 08, 2024



Robotic systems are typically composed of various subsystems, such as localization and navigation, each encompassing numerous configurable components (e.g., selecting different planning algorithms). Once an algorithm has been selected for a component, its associated configuration options must be set to the appropriate values. Configuration options across the system stack interact non-trivially. Finding optimal configurations for highly configurable robots to achieve desired performance poses a significant challenge due to the interactions between configuration options across software and hardware that result in an exponentially large and complex configuration space. These challenges are further compounded by the need for transferability between different environments and robotic platforms. Data efficient optimization algorithms (e.g., Bayesian optimization) have been increasingly employed to automate the tuning of configurable parameters in cyber-physical systems. However, such optimization algorithms converge at later stages, often after exhausting the allocated budget (e.g., optimization steps, allotted time) and lacking transferability. This paper proposes CURE -- a method that identifies causally relevant configuration options, enabling the optimization process to operate in a reduced search space, thereby enabling faster optimization of robot performance. CURE abstracts the causal relationships between various configuration options and robot performance objectives by learning a causal model in the source (a low-cost environment such as the Gazebo simulator) and applying the learned knowledge to perform optimization in the target (e.g., Turtlebot 3 physical robot). We demonstrate the effectiveness and transferability of CURE by conducting experiments that involve varying degrees of deployment changes in both physical robots and simulation.
CaRE: Finding Root Causes of Configuration Issues in Highly-Configurable Robots
Jan 18, 2023



Robotic systems have several subsystems that possess a huge combinatorial configuration space and hundreds or even thousands of possible software and hardware configuration options interacting non-trivially. The configurable parameters can be tailored to target specific objectives, but when incorrectly configured, can cause functional faults. Finding the root cause of such faults is challenging due to the exponentially large configuration space and the dependencies between the robot's configuration settings and performance. This paper proposes CaRE, a method for diagnosing the root cause of functional faults through the lens of causality, which abstracts the causal relationships between various configuration options and the robot's performance objectives. We demonstrate CaRE's efficacy by finding the root cause of the observed functional faults via CaRE and validating the diagnosed root cause, conducting experiments in both physical robots (Husky and Turtlebot 3) and in simulation (Gazebo). Furthermore, we demonstrate that the causal models learned from robots in simulation (simulating Husky in Gazebo) are transferable to physical robots across different platforms (Turtlebot 3).
Towards Better Adaptive Systems by Combining MAPE, Control Theory, and Machine Learning
Mar 19, 2021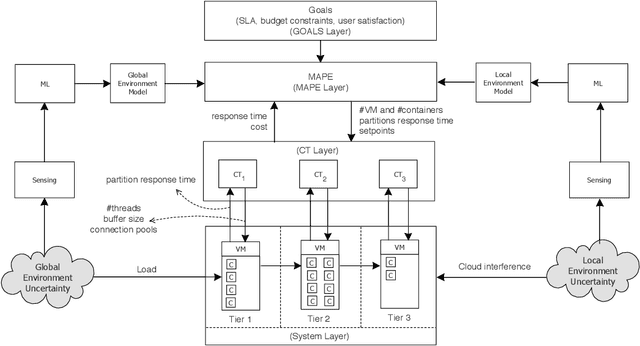


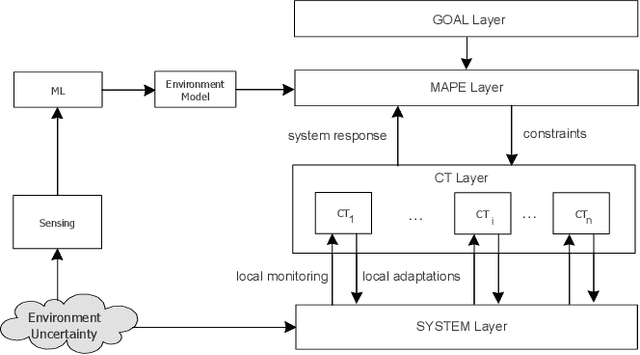
Two established approaches to engineer adaptive systems are architecture-based adaptation that uses a Monitor-Analysis-Planning-Executing (MAPE) loop that reasons over architectural models (aka Knowledge) to make adaptation decisions, and control-based adaptation that relies on principles of control theory (CT) to realize adaptation. Recently, we also observe a rapidly growing interest in applying machine learning (ML) to support different adaptation mechanisms. While MAPE and CT have particular characteristics and strengths to be applied independently, in this paper, we are concerned with the question of how these approaches are related with one another and whether combining them and supporting them with ML can produce better adaptive systems. We motivate the combined use of different adaptation approaches using a scenario of a cloud-based enterprise system and illustrate the analysis when combining the different approaches. To conclude, we offer a set of open questions for further research in this interesting area.
Machine Learning Meets Quantitative Planning: Enabling Self-Adaptation in Autonomous Robots
Mar 10, 2019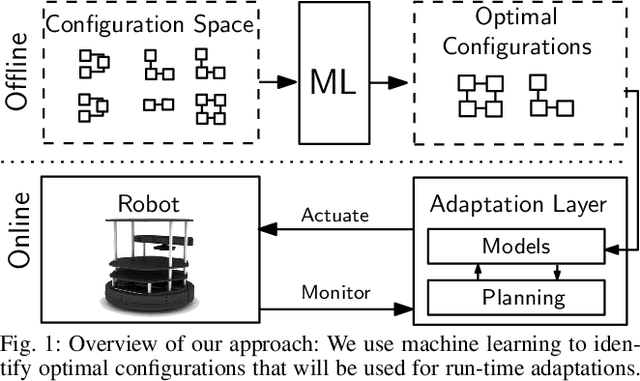
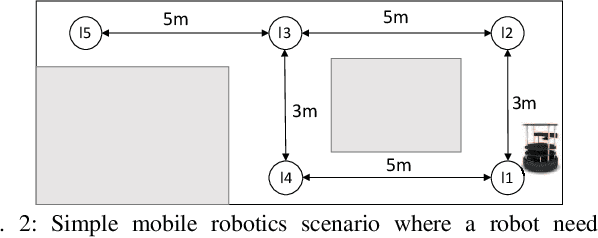
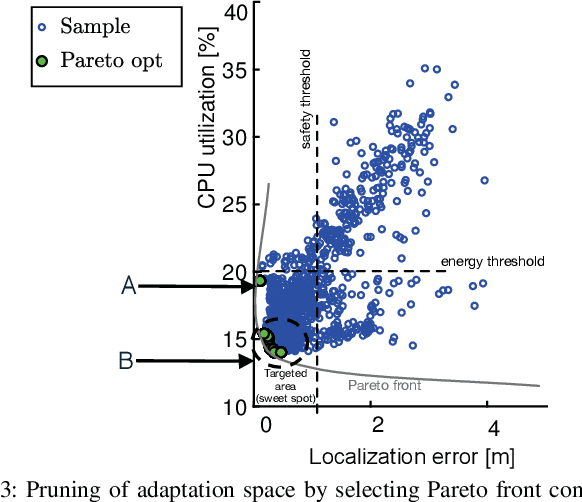
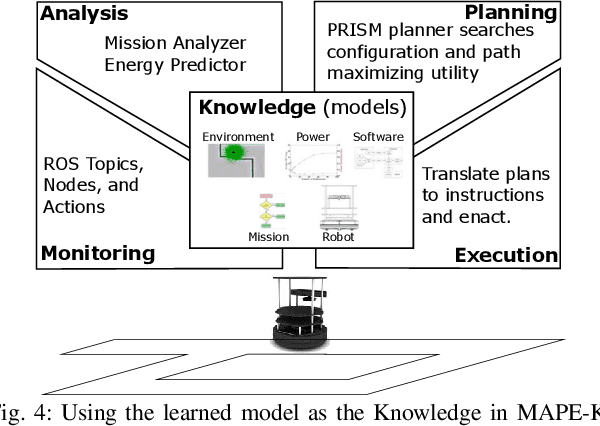
Modern cyber-physical systems (e.g., robotics systems) are typically composed of physical and software components, the characteristics of which are likely to change over time. Assumptions about parts of the system made at design time may not hold at run time, especially when a system is deployed for long periods (e.g., over decades). Self-adaptation is designed to find reconfigurations of systems to handle such run-time inconsistencies. Planners can be used to find and enact optimal reconfigurations in such an evolving context. However, for systems that are highly configurable, such planning becomes intractable due to the size of the adaptation space. To overcome this challenge, in this paper we explore an approach that (a) uses machine learning to find Pareto-optimal configurations without needing to explore every configuration and (b) restricts the search space to such configurations to make planning tractable. We explore this in the context of robot missions that need to consider task timeliness and energy consumption. An independent evaluation shows that our approach results in high-quality adaptation plans in uncertain and adversarial environments.