 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Run-time Safety Monitors for Machine Learning Components
Jun 23, 2024



For machine learning components used as part of autonomous systems (AS) in carrying out critical tasks it is crucial that assurance of the models can be maintained in the face of post-deployment changes (such as changes in the operating environment of the system). A critical part of this is to be able to monitor when the performance of the model at runtime (as a result of changes) poses a safety risk to the system. This is a particularly difficult challenge when ground truth is unavailable at runtime. In this paper we introduce a process for creating safety monitors for ML components through the use of degraded datasets and machine learning. The safety monitor that is created is deployed to the AS in parallel to the ML component to provide a prediction of the safety risk associated with the model output. We demonstrate the viability of our approach through some initial experiments using publicly available speed sign datasets.
Verified Synthesis of Optimal Safety Controllers for Human-Robot Collaboration
Jun 11, 2021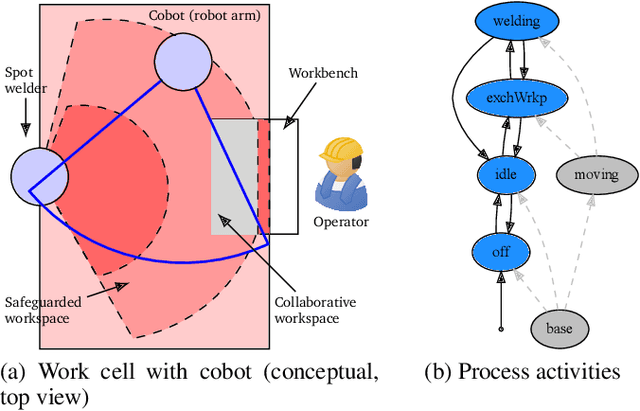
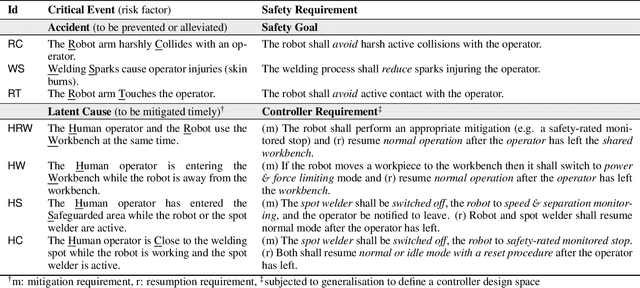
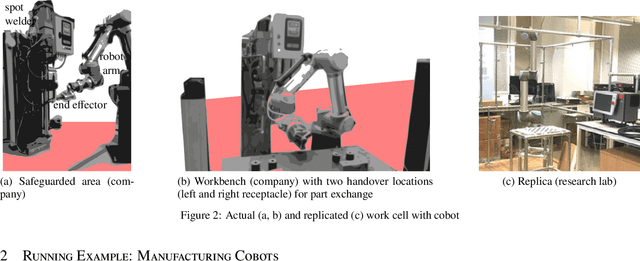
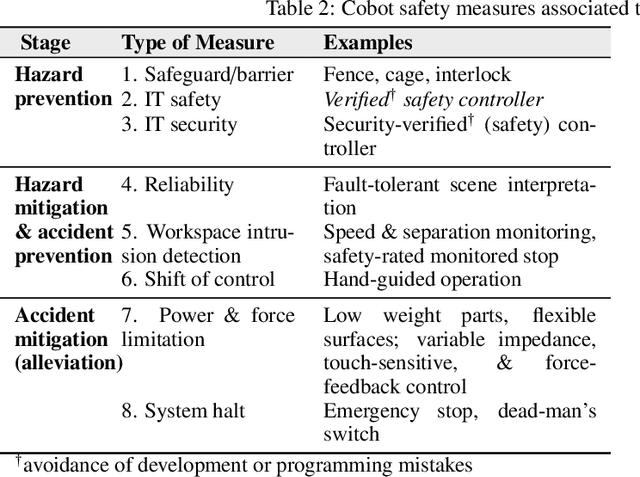
We present a tool-supported approach for the synthesis, verification and validation of the control software responsible for the safety of the human-robot interaction in manufacturing processes that use collaborative robots. In human-robot collaboration, software-based safety controllers are used to improve operational safety, e.g., by triggering shutdown mechanisms or emergency stops to avoid accidents. Complex robotic tasks and increasingly close human-robot interaction pose new challenges to controller developers and certification authorities. Key among these challenges is the need to assure the correctness of safety controllers under explicit (and preferably weak) assumptions. Our controller synthesis, verification and validation approach is informed by the process, risk analysis, and relevant safety regulations for the target application. Controllers are selected from a design space of feasible controllers according to a set of optimality criteria, are formally verified against correctness criteria, and are translated into executable code and validated in a digital twin. The resulting controller can detect the occurrence of hazards, move the process into a safe state, and, in certain circumstances, return the process to an operational state from which it can resume its original task. We show the effectiveness of our software engineering approach through a case study involving the development of a safety controller for a manufacturing work cell equipped with a collaborative robot.
Towards Better Adaptive Systems by Combining MAPE, Control Theory, and Machine Learning
Mar 19, 2021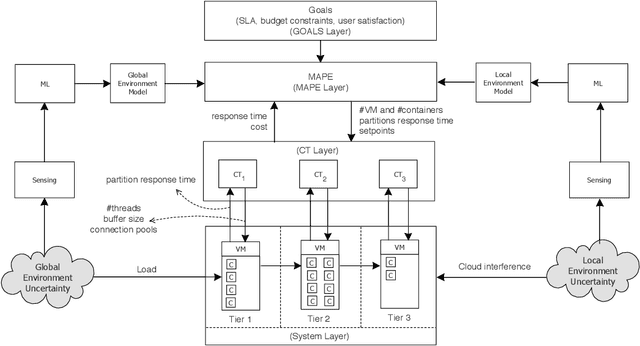


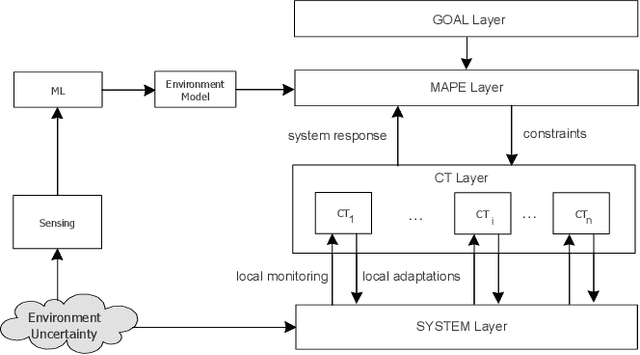
Two established approaches to engineer adaptive systems are architecture-based adaptation that uses a Monitor-Analysis-Planning-Executing (MAPE) loop that reasons over architectural models (aka Knowledge) to make adaptation decisions, and control-based adaptation that relies on principles of control theory (CT) to realize adaptation. Recently, we also observe a rapidly growing interest in applying machine learning (ML) to support different adaptation mechanisms. While MAPE and CT have particular characteristics and strengths to be applied independently, in this paper, we are concerned with the question of how these approaches are related with one another and whether combining them and supporting them with ML can produce better adaptive systems. We motivate the combined use of different adaptation approaches using a scenario of a cloud-based enterprise system and illustrate the analysis when combining the different approaches. To conclude, we offer a set of open questions for further research in this interesting area.
DeepCert: Verification of Contextually Relevant Robustness for Neural Network Image Classifiers
Mar 02, 2021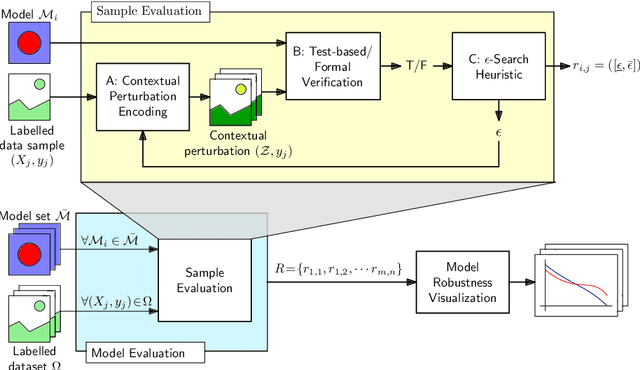
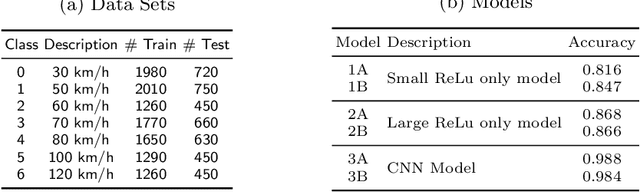


We introduce DeepCert, a tool-supported method for verifying the robustness of deep neural network (DNN) image classifiers to contextually relevant perturbations such as blur, haze, and changes in image contrast. While the robustness of DNN classifiers has been the subject of intense research in recent years, the solutions delivered by this research focus on verifying DNN robustness to small perturbations in the images being classified, with perturbation magnitude measured using established Lp norms. This is useful for identifying potential adversarial attacks on DNN image classifiers, but cannot verify DNN robustness to contextually relevant image perturbations, which are typically not small when expressed with Lp norms. DeepCert addresses this underexplored verification problem by supporting:(1) the encoding of real-world image perturbations; (2) the systematic evaluation of contextually relevant DNN robustness, using both testing and formal verification; (3) the generation of contextually relevant counterexamples; and, through these, (4) the selection of DNN image classifiers suitable for the operational context (i)envisaged when a potentially safety-critical system is designed, or (ii)observed by a deployed system. We demonstrate the effectiveness of DeepCert by showing how it can be used to verify the robustness of DNN image classifiers build for two benchmark datasets (`German Traffic Sign' and `CIFAR-10') to multiple contextually relevant perturbations.
Guidance on the Assurance of Machine Learning in Autonomous Systems
Feb 02, 2021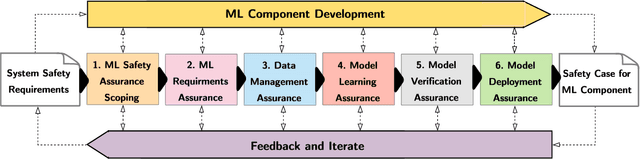



Machine Learning (ML) is now used in a range of systems with results that are reported to exceed, under certain conditions, human performance. Many of these systems, in domains such as healthcare , automotive and manufacturing, exhibit high degrees of autonomy and are safety critical. Establishing justified confidence in ML forms a core part of the safety case for these systems. In this document we introduce a methodology for the Assurance of Machine Learning for use in Autonomous Systems (AMLAS). AMLAS comprises a set of safety case patterns and a process for (1) systematically integrating safety assurance into the development of ML components and (2) for generating the evidence base for explicitly justifying the acceptable safety of these components when integrated into autonomous system applications.
Detection and Mitigation of Rare Subclasses in Neural Network Classifiers
Nov 28, 2019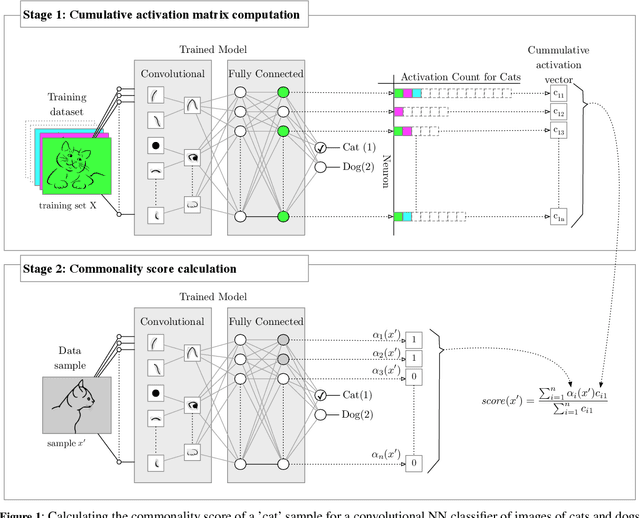
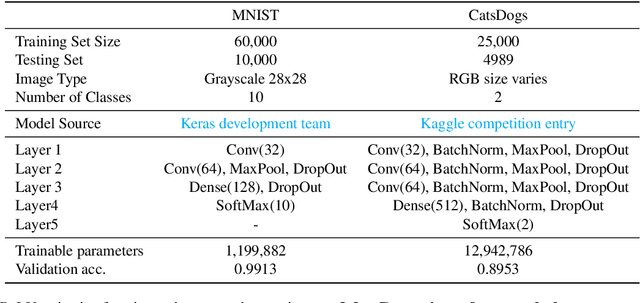
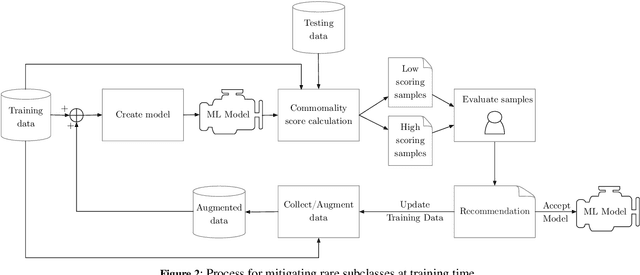
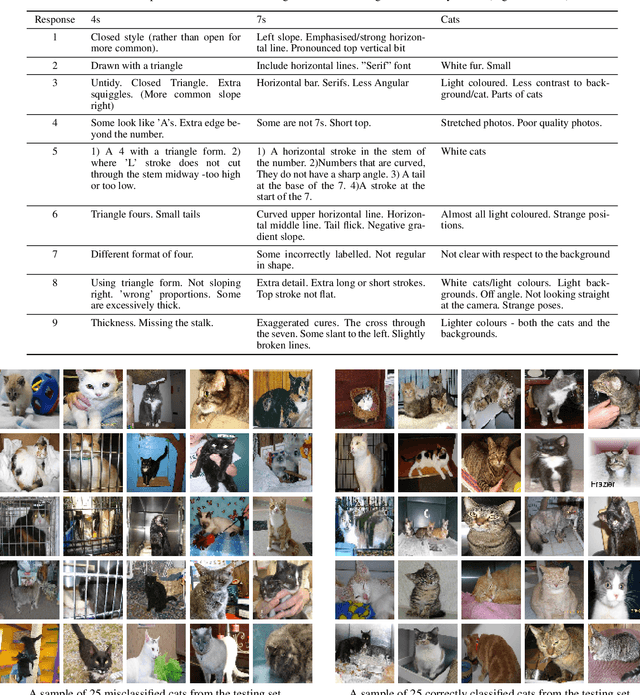
Regions of high-dimensional input spaces that are underrepresented in training datasets reduce machine-learnt classifier performance, and may lead to corner cases and unwanted bias for classifiers used in decision making systems. When these regions belong to otherwise well-represented classes, their presence and negative impact are very hard to identify. We propose an approach for the detection and mitigation of such rare subclasses in neural network classifiers. The new approach is underpinned by an easy-to-compute commonality metric that supports the detection of rare subclasses, and comprises methods for reducing their impact during both model training and model exploitation.
Assuring the Machine Learning Lifecycle: Desiderata, Methods, and Challenges
May 10, 2019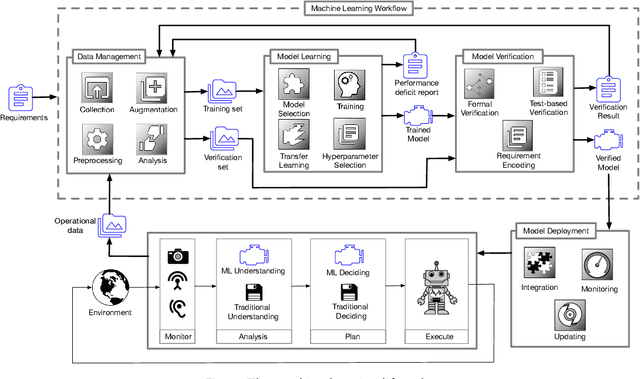
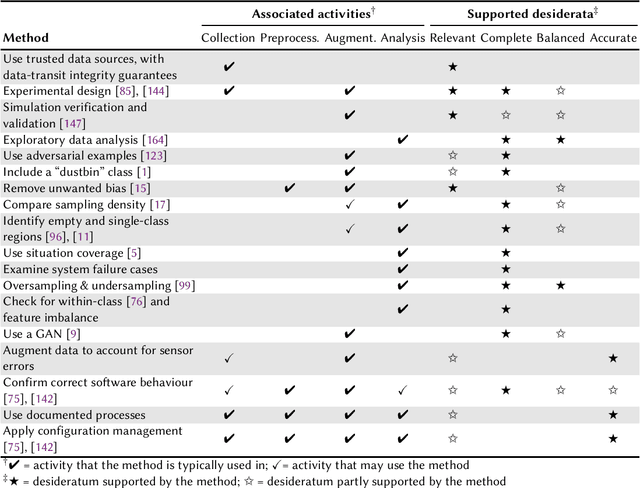
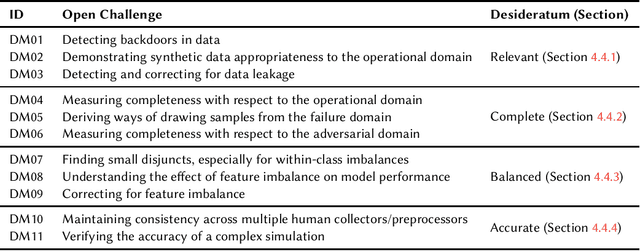

Machine learning has evolved into an enabling technology for a wide range of highly successful applications. The potential for this success to continue and accelerate has placed machine learning (ML) at the top of research, economic and political agendas. Such unprecedented interest is fuelled by a vision of ML applicability extending to healthcare, transportation, defence and other domains of great societal importance. Achieving this vision requires the use of ML in safety-critical applications that demand levels of assurance beyond those needed for current ML applications. Our paper provides a comprehensive survey of the state-of-the-art in the assurance of ML, i.e. in the generation of evidence that ML is sufficiently safe for its intended use. The survey covers the methods capable of providing such evidence at different stages of the machine learning lifecycle, i.e. of the complex, iterative process that starts with the collection of the data used to train an ML component for a system, and ends with the deployment of that component within the system. The paper begins with a systematic presentation of the ML lifecycle and its stages. We then define assurance desiderata for each stage, review existing methods that contribute to achieving these desiderata, and identify open challenges that require further research.